短距离大高差RTK中对流层延迟实测气象改正方法
短距离大高差rtk中对流层延迟实测气象改正方法
技术领域
1.本发明涉及一种短距离大高差rtk中对流层延迟实测气象改正方法。
背景技术:
2.常规的rtk技术假定基准站与流动站间距较小,进而认为两端的对流层延迟和电离层延迟差异较小,通过双差可以消除大部分。常规rtk接收机和基准站不配备气象观测,双差残余的对流层延迟只能忽略,或通过基于标准气象参数的对流层延迟模型(如hopfield模型、saastamoinen模型)计算;然而,对于短距离大高差环境,常规的rtk技术不再适用,原因在于大高差环境下,流动站和基准站间的对流层延迟差异较大,基于标准气象参数的对流层延迟模型无法表达此二者的对流层延迟差异,导致短距离大高差rtk定位精度差;因此,开发一种短距离大高差rtk定位精度高的对流层延迟实测气象改正方法很有必要。
技术实现要素:
3.本发明的目的是为了提供一种短距离大高差rtk中对流层延迟实测气象改正方法,短距离大高差rtk定位精度高,解决上述短距离大高差rtk定位精度差的问题。
4.为了实现上述目的,本发明的技术方案为:一种短距离大高差rtk中对流层延迟实测气象改正方法,其特征在于:包括如下步骤,步骤一:在基准站gnss接收机和流动站rtk接收机同时配备实测气象观测传感器;步骤二:将流动站实测气象参数与基准站实测气象参数通过通信传输(如4g通信)汇集在一处(汇集在流动站或服务端);克服了传统方法无气象参数传输的缺陷;步骤三:利用流动站和基准站的实测气象参数,计算各卫星路径上流动站与基准站间的斜路径对流层延迟之差,即对流层延迟改正值;本发明在计算双差对流层延迟时,基于实测气象参数进行计算,短距离大高差rtk定位精度高;克服了传统方法忽略对流层延迟或采用模型值,导致短距离大高差rtk定位精度差的问题;步骤四:将对流层延迟改正值改正到其中一个站的观测值上;步骤五:将改正后的观测值和另一个站的观测值汇集在一处,构建双差观测方程,求解定位参数。
5.在上述技术方案中,在步骤二中,可以将流动站实测气象参数发送给基准站,也可以将基准站的实测气象参数发送给流动站。
6.在上述技术方案中,在步骤三中,观测到的各卫星路径上基准站与流动站对流层延迟之差的计算方法如下:假设卫星s,其中一个站记为站m,另一个站记为站n,组成的基线解算得到任意时刻站间站n与站m斜路径对流层延迟(即卫星s对应的测站m与测站n的对流层延迟)之差可以写成如下形式:
(1)式(1)中:hm表示站m的高程;hn表示站n的高程;、和、分别表示卫星i与基准站或流动站位置的对流层斜延迟和映射函数;和分别为利用实测气象元素计算得到的基准站和流动站位置的天顶对流层延迟;由于基准站与流动站距离较近,因此,映射函数几乎相同;上式(1)写成:(2)将转换为相位观测值:
ꢀꢀꢀꢀꢀꢀ
(3)式(2)、式(3)中:为任意时刻站间站n与站m斜路径对流层延迟之差,为相应观测频率对应的波长,为对应的相位观测值对流层延迟改正量。
7.在上述技术方案中,在步骤四中,将各卫星路径上的对流层延迟之差改正到其中一个站的gnss观测值上,具体包括如下步骤:
ꢀꢀꢀꢀꢀꢀꢀ
(4)
ꢀꢀꢀꢀꢀꢀꢀ
(5)式(4)、(5)中:为基准站m对卫星s的伪距观测值;为基准站m对卫星s的相位观测值;与为改正后的伪距和相位观测值;为任意时刻站间站n与站m斜路径对流层延迟之差;为对应的相位观测值对流层延迟改正量;本发明的改正方法为:利用已知的基准站伪距和相位观测值(p
sm
, l
sm
)减去步骤三计算得到的的斜路径对流层延迟之差t
smn
, l
smn
。
8.在上述技术方案中,在步骤三中,利用实测对流层延迟模型进行基准站和流动站的天顶对流层延迟计算,具体包括如下步骤:对流层延迟计算可采用saastamoinen模型和an模型计算;模型中需要的基准站和流动站实测气象元素从步骤一和步骤二中获取;采用saastamoinen模型计算静力学延迟的公式为:
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(6)式(6)中:p为大气压;h为测站高程;为测站纬度;利用an 模型计算的湿延迟,计算公式如下:
ꢀꢀꢀꢀ
(7)式(7)中:和为大气折射率常数,的值为16.529k
•
mb-1
,取值3.776
×
10
5 k
•
mb-1
;tm为大气加权平均温度;gm为重力加速度;rd为干空气比气体常数;为干燥空气的摩尔质量;rg为通用气体常数;为水气压递减率,可利用测站处的气象廓线数据拟合而来;p和e分别为待计算点处的大气压和水汽压;p0和e0为参考高程处的大气压和水汽压。
9.在上述技术方案中,在步骤四中,当步骤二将流动站实测气象参数发送给基准站,则将双差对流层延迟改正到基准站观测值上;当步骤二将基准站实测气象参数发送给流动站,则将双差对流层延迟改正到流动站观测值上;上述二种方法中组成双差观测方程,进行rtk解算的方法相同。
10.在上述技术方案中,在步骤五中,结合gnss观测值组成双差观测方程,进行rtk解算,具体解算方法包括如下步骤:设流动站待估坐标为,忽略电离层延迟误差后,误差方程在流动站初始坐标处进行泰勒级数展开,令, , ,得到线性模型为:(8)式(8)中:为卫星s、k第1个频率对应的站间双差观测误差;为卫星s、k第2个频率对应的站间双差观测误差;、、均为线性化系数;为第1个频率波长,为第2个频率波长;为卫星s、卫星k第1个频率对应的站间双差整周模糊度;为卫星s、卫星k第2个频率对应的站间双差整周模糊度;其中:线性化系数,, ;为双差星站距;为对流层延迟参数;(xs、ys、xs)为卫星s的坐标;(、、)为基准站n的坐标;为基准站m到卫星s的几何距离;为基准站n
到卫星k的几何距离;上式可写作矢量形式
ꢀꢀꢀꢀꢀꢀ
(9)式(9)中:v为观测误差;b为设计矩阵;x为待估参数;l为常数向量,对应的观测方程权矩阵为;利用最小二乘方法求解,得到模糊度参数、的浮点解和对流层延迟的浮点解和参数协方差:
ꢀꢀꢀꢀ
(10)
ꢀꢀꢀꢀꢀꢀꢀꢀ
(11)采用lambda方法进行模糊度固定;lambda方法为假定已知模糊度参数的浮点解及协方差,搜索如下目标函数的最优整数解;
ꢀꢀ
(12)获取模糊度参数最优整数解后,将其(即模糊度参数最优整数解)回代到双差观测方程,可以直接求取流动站坐标参数。
11.本发明适用于短距离大高差环境;本发明适用的短距离是指:距离最大不超过10km,一般在5km以内;本发明适用的大高差是指:高差大于100m,结合地表高差实际,一般为100m-1000m;本发明的rtk定位精度为cm级。
12.相对于常规rtk,本发明具有如下优点:(1)基准站与流动站均配备气象传感器进行气象观测,常规rtk不配备(常规rtk一般假定与基准站的气象条件差不多,因此不配备气象传感器);(2)通信传输上,常规rtk只向基准站发送概略位置,本发明还发送气象观测值;常规rtk中,基准站向流动站发送基准站位置和gnss观测值,而本发明增加了基准站气象观测值的传输,能进行实时定位,提高rtk定位精度;(3)常规rtk的对流层延迟忽略或在流动端计算,本发明对流层延迟改正在服务端计算,并且直接改正到gnss观测值上;常规rtk的对流层延迟采用忽略或基于标准气象参数计算的方法,本发明采用了实测气象观测参数进行计算,能进行实时定位,提高rtk定位精度;(4)常规rtk组成双差观测方程采用的两个站的观测值,本发明组建双差观测方程时,其中一个站采用了经对流层延迟改正后的观测值,提高rtk定位精度;(5)本发明适用于短距离大高差环境,且rtk定位精度高(本发明的适用距离最大不超过10km,一般在5km以内;本发明适用的高差大于100m,结合地表高差实际,一般为100m-1000m;本发明的rtk定位精度为cm级),解决上述短距离大高差rtk定位精度差的问题(常规的rtk技术不适用于短距离大高差环境(如,距离小于10km、高差大于100m的环境),且高差越大,精度越差,常规的rtk技术定位精度一般在分米级);(6)本发明仅需在基准站和流动站各建立1个气象观测站(共计建立2个气象观测站),减低建模复杂度、不需要对基准站(即服务端)的算法/系统进行升级也能达到大高差定位的目的;本发明无需对内置接收机功能做任何改动,保证了在不更换基准站接收机的
前提下,使用发明进行对流层改正,提高rtk定位精度,降低成本(建设气象观测站的成本相对于现有技术降低了一半以上);克服了现有技术需在地面建设多个(大于或等于4个气象观测站),建模复杂度高、需要对基准站(即服务端)的算法/系统进行升级,成本较高的缺陷。
附图说明
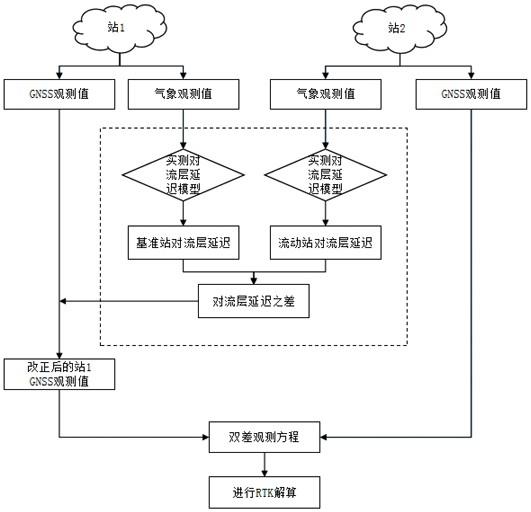
13.图1为本发明的流程图;图2为本发明实施例1中流动站将实测气象观测值发送给基准站的流程图;图3为本发明实施例2中基准站将实测气象观测值发送给流动站的流程图。
具体实施方式
14.下面结合附图详细说明本发明的实施情况,但它们并不构成对本发明的限定,仅作举例而已。同时通过说明使本发明的优点更加清楚和容易理解。
15.本发明方法在基准站和流动站同时配备气象观测传感器,对气温、气压、水汽压进行观测,并基于实测气象观测改进rtk定位算法模型。本发明用实测气象元素以提高对流层延迟来提高定位精度,因为采用的是实测气象元素,其对流层延迟改正精度远远优于常规rtk的基于标准气象参数的对流层模型。本发明中的实测气象元素用于实时定位,提高rtk定位精度(将rtk定位精度由分米级提高至厘米级)。
16.参阅附图可知:短距离大高差rtk中对流层延迟实测气象改正方法,包括如下步骤,步骤一:在基准站gnss接收机、流动站rtk接收机(即图1中的站1和站2)同时配备实测气象观测传感器(如温湿压传感器件等);步骤二:将流动站实测气象参数与基准站实测气象参数通过通信传输(如4g通信)汇集在一处;步骤三:利用流动站和基准站的实测气象参数,计算各卫星路径上流动站与基准站间的斜路径对流层延迟之差,即对流层延迟改正值;步骤四:将对流层延迟改正值改正到其中一个站(流动站或基准站)(图1中为站1)的观测值上;步骤五:将改正后的观测值和另一个站(基准站或流动站)(图1中为站2)的观测值汇集在一处,构建双差观测方程,求解定位参数(如图1所示)。
17.进一步地,在步骤二中,可以将流动站实测气象参数(即实测气象元素)发送给基准站,也可以将基准站的实测气象参数发送给流动站。
18.进一步地,在步骤三中,观测到的各卫星路径上基准站与流动站对流层延迟之差的计算方法如下:假设卫星s,其中一个站(流动站或基准站)记为站m,另一个站(基准站或流动站)记为站n,组成的基线解算得到任意时刻站间站n与站m斜路径对流层延迟(即卫星s对应的测站m与测站n之间的对流层延迟)之差可以写成如下形式:
(1)式(1)中:hm表示站m的高程;hn表示站n的高程;、和、分别表示卫星i与基准站或流动站位置的对流层斜延迟和映射函数;和分别为利用实测气象元素计算得到的基准站和流动站位置的天顶对流层延迟;由于基准站与流动站距离较近,因此,映射函数几乎相同;上式(1)可以写成: (2)式(2)中:为任意时刻站间站n与站m斜路径对流层延迟之差;将转换为相位观测值:
ꢀꢀꢀꢀꢀꢀ
(3)式(3)中:为任意时刻站间站n与站m斜路径对流层延迟之差;为相应观测频率对应的波长;为对应的相位观测值对流层延迟改正量。
19.进一步地,在步骤四中,将各卫星路径上的对流层延迟之差改正到其中一个站(基准站或流动站)的gnss观测值上,具体包括如下步骤:
ꢀꢀꢀꢀꢀꢀꢀ
(4)
ꢀꢀꢀꢀꢀꢀꢀ
(5)式(4)、(5)中:为基准站m对卫星s的伪距观测值;为基准站m对卫星s的相位观测值;与为改正后的伪距和相位观测值;为任意时刻站间站n与站m斜路径对流层延迟之差;为对应的相位观测值对流层延迟改正量。
20.进一步地,在步骤三中,利用实测对流层延迟模型进行基准站和流动站的天顶对流层延迟计算,具体包括如下步骤:对流层延迟计算可采用saastamoinen模型和an模型计算;模型中需要的基准站和流动站实测气象元素从步骤一和步骤二中获取;采用saastamoinen模型计算静力学延迟的公式为:
ꢀꢀꢀꢀ
(6)式(6)中:p为大气压;h为测站高程;为测站纬度;利用an 模型计算的湿延迟,计算公式如下:
ꢀꢀꢀ
(7)式(7)中:和为大气折射率常数,的值为16.529k
•
mb-1
,取值3.776
×
10
5 k
•
mb-1
;tm为大气加权平均温度;gm为重力加速度;rd为干空气比气体常数;为干燥空气的摩尔质量;rg为通用气体常数;为水气压递减率,可利用测站处的气象廓线数据拟合而来;p和e分别为待计算点处的大气压和水汽压;p0和e0为参考高程处的大气压和水汽压。
21.进一步地,在步骤四中,若步骤二将流动站实测气象参数发送给基准站,则将双差对流层延迟改正到基准站观测值上;若步骤二将基准站实测气象参数发送给流动站,则将双差对流层延迟改正到流动站观测值上。
22.进一步地,在步骤五中,结合gnss观测值组成双差观测方程,进行rtk解算,具体解算方法包括如下步骤:设流动站待估坐标为,忽略电离层延迟误差后,误差方程在流动站初始坐标处进行泰勒级数展开,令, , ,得到线性模型为:(8)式(8)中:为卫星s、k第1个频率对应的站间双差观测误差;为卫星s、k第2个频率对应的站间双差观测误差;、、均为线性化系数;为第1个频率波长,为第2个频率波长;为卫星s、卫星k第1个频率对应的站间双差整周模糊度;为卫星s、卫星k第2个频率对应的站间双差整周模糊度;其中:线性化系数,, ;为双差星站距;为对流层延迟参数;(xs、ys、xs)为卫星s的坐标;(、、)为基准站n的坐标;为基准站m到卫星s的几何距离;为基准站n到卫星k的几何距离;上式可写作矢量形式
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(9)式(9)中:v为观测误差;b为设计矩阵;x为待估参数;l为常数向量;对应的观测方程权矩阵为;利用最小二乘方法求解,得到模糊度参数、的浮点解和对流层延迟的浮点解和参数协方差:
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(10)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(11)采用lambda方法进行模糊度固定;lambda方法为假定已知模糊度参数的浮点解及协方差,搜索如下目标函数的最优整数解,
ꢀꢀꢀ
(12)获取模糊度参数最优整数解后,将其(即模糊度参数最优整数解)回代到双差观测方程(即公式(8)),可以直接求取流动站坐标参数。
23.实施例1如图2所示,为使用本方法时,流动站将实测气象观测值发送给基准站的实施例。首先,流动站和基准站同时配备实测气象观测传感器;其次,流动站进行rtk定位前,先将自身概略位置和实测气象观测值发送给基准站;再此,基准站基于自身实测气象观测和流动站气象观测值计算斜路径对流层延迟之差,改正到基准站观测值上;进而,基准站将改正后的gnss观测值发送给流动站。最后,流动站基于基准站发送来的观测值和自身观测值组建观测方程,进行rtk解算;结论:该实施例采用本发明方法按照上述先后顺序执行,对流层延迟改正的计算位于基准站,流动站(即用户部分)除了增加气象传感器及气象传输功能外,无需对内置的rtk算法做任何改动。使本实施例可以兼容旧的rtk算法或模块。同时,由于计算部分在基准站,减轻了流动站的计算压力,能进行实时定位,提高rtk定位精度。
24.实施例2如图3所示,为使用本方法时,基准站将实测气象观测值发送给流动站的实施例。首先,流动站和基准站同时配备实测气象观测传感器;其次,流动站进行rtk定位前,先将自身概略位置发送给基准站;再次,基准站将自身观测值和实测气象观测值发送给流动站;再次,流动站根据基准站发送来的实测气象观测值和流动站实测气象观测值计算斜路径对流层延迟之差;进而,利用斜路径对流层延迟之差对流动站观测值进行改正;最后,流动站基于基准站发来的gnss观测值和自身改正后的的观测值构建双差观测方程,进行rtk解算;结论:该实施例采用本发明方法按照上述先后顺序执行,改正对流层延迟的计算部分位于流动站(即用户部分/客户端),可以减轻基准站的计算压力。同时,基准站除了增加气象传感器和气象传输功能外,无需对内置接收机功能做任何改动,保证了在不更换基准站接收机的前提下,使用本实施例进行对流层改正,提高rtk定位精度;本实施例仅需在基准站和流动站各建立1个气象观测站(共计建立2个气象观测站),减低建模复杂度、不需要对基准站(即服务端)的算法/系统进行升级也能达到大高差定位的目的,降低成本(建设
气象观测站的成本相对于现有技术降低了一半以上);克服了现有技术需在地面建设多个(大于或等于4个气象观测站),建模复杂度高、需要对基准站(即服务端)的算法/系统进行升级,成本较高的缺陷。
25.其它未说明的部分均属于现有技术。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1