巷道开掘方法和投影设备与流程
1.本发明涉及隧道挖掘领域,具体而言,涉及一种巷道开掘方法和投影设备。
背景技术:
2.我国煤矿巷道在掘进时为了保证巷道掘进方向与设计一致,工程技术人员采用全站仪测量后利用激光指向仪器对巷道中线点进行测量定位,以保证巷道掘进方向正确。
3.然而,当前使用的激光指向仪在定位巷道中线时仅能在掘进工作面迎头处投影出一个激光指向点,现场施工人员根据激光指向点再测量定位出巷道中线和巷道腰线,大概勾勒出巷道断面整体形状,但这种方法的误差较大,导致实际掘进出的巷道与设计存在较大偏差。
技术实现要素:
4.本发明的主要目的在于提供一种巷道开掘方法和投影设备,以解决现有技术中的巷道挖掘容易产生偏差的问题。
5.为了实现上述目的,根据本发明的一个方面,提供了一种巷道掘进方法,包括:向巷道的工作面上投射参照信息,以对巷道的顶面、第一侧面、第二侧面以及底面的掘进位置进行定位;根据参照信息对巷道掘进预设距离;根据巷道的掘进距离调整参照信息投射在工作面上的尺寸,并将参照信息投射在上一次掘进后形成的工作面上。
6.进一步地,向巷道的工作面上投射参照信息的方法包括:向巷道的工作面上投射第一指示线,以对巷道的顶面的掘进位置进行定位;向巷道的工作面上投射第二指示线,第二指示线与第一指示线连接,以对巷道的第一侧面的掘进位置进行定位;向巷道的工作面上投射第三指示线,第三指示线与第一指示线远离第二指示线的一端连接,以对巷道的第二侧面的掘进位置进行定位;向巷道的工作面上投射第四指示线,第四指示线的一端与第二指示线远离第一指示线的一端连接,第四指示线的另一端与第三指示线远离第二指示线的一端连接,以对巷道的底面的掘进位置进行定位。
7.进一步地,向巷道的工作面上投射参照信息的方法包括:向巷道的工作面上投射第五指示线,第五指示线与第四指示线连接,以对设置在底面的排水沟的掘进位置进行定位。
8.进一步地,向巷道的工作面上投射参照信息的方法包括向巷道的工作面上投射第六指示线;其中,第六指示线与第一指示线相互平行地设置,以对涂覆在顶面上的喷浆层进行定位;和/或,第六指示线与第二指示线相互平行地设置,以对涂覆在第一侧面上的喷浆层进行定位;和/或,第六指示线与第三指示线相互平行地设置,以对涂覆在第二侧面上的喷浆层进行定位。
9.进一步地,向巷道的工作面上投射参照信息的方法包括:向巷道的工作面上投射指示标识,指示标识相间隔地设置在第六指示线上;以对用于支护巷道的锚杆或者锚索的安装进行定位。
10.进一步地,向巷道的工作面上投射参照信息的方法包括:向巷道的工作面上投射第七指示线,第七指示线与第四指示线相互平行地设置,以对铺设在底面上的地坪层进行定位。
11.进一步地,向巷道的工作面上投射参照信息的方法包括:向巷道的工作面上投射第八指示线,第八指示线位于第七指示线与第四指示线之间,以对设置在地坪层中的金属网进行定位。
12.进一步地,调整参照信息的尺寸的方法包括:根据巷道掘进预设距离,计算出参照信息需要改进的尺寸的大小,并将改进后的尺寸投射在工作面上。
13.根据本发明的另一方面,提供了一种投影设备,适用于权利要求1至8中任一项的巷道掘进方法,投影设备包括投影仪,投影仪设置在巷道的顶面上,以向巷道的工作面上投射参照信息。
14.进一步地,投影设备还包括:感应装置,感应装置设置在巷道内,以对巷道的掘进位置进行感应;控制装置,与感应装置信号连接;报警器,与控制装置信号连接,当掘进位置与参照信息指示的位置产生偏离时,通过控制装置控制报警器发出警报。
15.应用本发明的技术方案,本发明的巷道掘进方法,包括:向巷道的工作面上投射参照信息,以对巷道的顶面、第一侧面、第二侧面以及底面的掘进位置进行定位;根据参照信息对巷道掘进预设距离;根据巷道的掘进距离调整参照信息投射在工作面上的尺寸,并将参照信息投射在上一次掘进后形成的工作面上。采用上述方法,采用激光投影仪等技术将巷道尺寸数据(如巷道高度、巷道宽度、墙高、拱高、喷浆厚度、地坪厚度、后续安装胶带机的位置、水沟尺寸等)投影在掘进工作面迎头,以便于施工人员更直观的了解掘进工作面巷道断面的尺寸数据,提高施工质量,这样,工作人员在施工时可以获得参照,直接将设计的巷道全断面形状投影在掘进工作面迎头,无需工程技术人员进行现场放线,并可以直观地指导掘进机司机进行截割,解决了现有技术中的巷道挖掘容易产生偏差的问题。
附图说明
16.构成本技术的一部分的说明书附图用来提供对本发明的进一步理解,本发明的示意性实施例及其说明用于解释本发明,并不构成对本发明的不当限定。在附图中:
17.图1示出了根据本发明的投影仪的工作状态示意图;
18.图2示出了本发明的巷道掘进方法中的参照信息的实施例一的示意图;
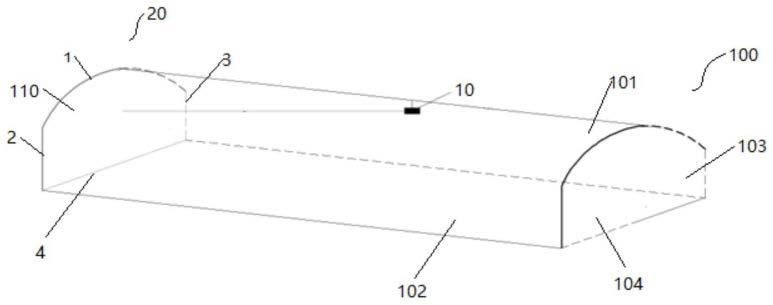
19.图3示出了本发明的巷道掘进方法中的巷道的工作面的结构示意图;
20.图4示出了本发明的巷道掘进方法中的参照信息的实施例二的示意图;
21.图5示出了本发明的巷道掘进方法中的参照信息的实施例三的示意图;
22.图6示出了本发明的巷道掘进方法中的参照信息的实施例四的示意图;
23.图7示出了本发明的巷道掘进方法中的参照信息的实施例五的示意图;
24.图8示出了本发明的巷道掘进方法的工作原理示意图。
25.其中,上述附图包括以下附图标记:
26.100、巷道;110、工作面;101、顶面;102、第一侧面;103、第二侧面;104、底面;1041、地坪层;1042、金属网;105、喷浆层;106、排水沟;
27.10、投影仪;20、参照信息;1、第一指示线;2、第二指示线;3、第三指示线;4、第四指
示线;5、第五指示线;6、第六指示线;7、第七指示线;8、第八指示线;9、指示标识。
具体实施方式
28.需要说明的是,在不冲突的情况下,本技术中的实施例及实施例中的特征可以相互组合。下面将参考附图并结合实施例来详细说明本发明。
29.参见图1至图8,本实施例的巷道掘进方法,包括:向巷道100的工作面110上投射参照信息20,以对巷道100的顶面101、第一侧面102、第二侧面103以及底面104的掘进位置进行定位;根据参照信息20对巷道100掘进预设距离;根据巷道100的掘进距离调整参照信息投射在工作面110上的尺寸,并将参照信息20投射在上一次掘进后形成的工作面110上。采用上述方法,采用激光投影仪等技术将巷道尺寸数据(如巷道高度、巷道宽度、墙高、拱高、喷浆厚度、地坪厚度、后续安装胶带机的位置、水沟尺寸等)投影在掘进工作面迎头,以便于施工人员更直观的了解掘进工作面巷道断面的尺寸数据,提高施工质量,这样,工作人员在施工时可以获得参照,直接将设计的巷道全断面形状投影在掘进工作面迎头,无需工程技术人员进行现场放线,并可以直观地指导掘进机司机进行截割,解决了现有技术中的巷道挖掘容易产生偏差的问题。
30.在本实施例的巷道掘进方法中,参见图1至图7,向巷道100的工作面110上投射参照信息20的方法包括:向巷道100的工作面110上投射第一指示线1,以对巷道100的顶面101的掘进位置进行定位;向巷道100的工作面110上投射第二指示线2,第二指示线2与第一指示线1连接,以对巷道100的第一侧面102的掘进位置进行定位;向巷道100的工作面110上投射第三指示线3,第三指示线3与第一指示线1远离第二指示线2的一端连接,以对巷道100的第二侧面103的掘进位置进行定位;向巷道100的工作面110上投射第四指示线4,第四指示线4的一端与第二指示线2远离第一指示线1的一端连接,第四指示线4的另一端与第三指示线3远离第二指示线2的一端连接,以对巷道100的底面104的掘进位置进行定位。这样,直接将设计的巷道全断面形状投影在掘进工作面迎头,使得作业人员获得更加直观的参照。
31.参见图1至图7,在本实施例的巷道掘进方法中,向巷道100的工作面110上投射参照信息20的方法包括:向巷道100的工作面110上投射第五指示线5,第五指示线5与第四指示线4连接,以对设置在底面104的排水沟106的掘进位置进行定位。
32.在本实施例的巷道掘进方法中,参见图1至图7,向巷道100的工作面110上投射参照信息20的方法包括向巷道100的工作面110上投射第六指示线6;其中,第六指示线6与第一指示线1相互平行地设置,以对涂覆在顶面101上的喷浆层105进行定位;和/或,第六指示线6与第二指示线2相互平行地设置,以对涂覆在第一侧面102上的喷浆层105进行定位;和/或,第六指示线6与第三指示线3相互平行地设置,以对涂覆在第二侧面103上的喷浆层105进行定位。
33.参见图1至图7,在本实施例的巷道掘进方法中,向巷道100的工作面110上投射参照信息20的方法包括:向巷道100的工作面110上投射指示标识9,指示标识9相间隔地设置在第六指示线6上;以对用于支护巷道100的锚杆或者锚索的安装进行定位。
34.在本实施例的巷道掘进方法中,参见图1至图7,向巷道100的工作面110上投射参照信息20的方法包括:向巷道100的工作面110上投射第七指示线7,第七指示线7与第四指示线4相互平行地设置,以对铺设在底面104上的地坪层1041进行定位。
35.参见图1至图7,在本实施例的巷道掘进方法中,向巷道100的工作面110上投射参照信息20的方法包括:向巷道100的工作面110上投射第八指示线8,第八指示线8位于第七指示线7与第四指示线4之间,以对设置在地坪层1041中的金属网1042进行定位。
36.在本实施例的巷道掘进方法中,参见图1至图7,调整参照信息20的尺寸的方法包括:根据巷道100掘进预设距离,计算出参照信息20需要改进的尺寸的大小,并将改进后的尺寸投射在工作面110上。
37.本实施例的投影设备,适用于上述的巷道掘进方法,投影设备包括投影仪10,投影仪10设置在巷道100的顶面101上,以向巷道的工作面110上投射参照信息20。
38.在本实施例的投影设备中,投影设备还包括:感应装置,感应装置设置在巷道100内,以对巷道100的掘进位置进行感应;控制装置,与感应装置信号连接;报警器,与控制装置信号连接,当掘进位置与参照信息指示的位置产生偏离时,通过控制装置控制报警器发出警报。
39.实施例一:
40.参见图2,在本实施例中,参照信息20包括工作面的掘进断面形状、掘进距离、日期、喷浆厚度、地坪厚度、工作设备的位置等。
41.实施例二:
42.参见图4,在本实施例中,参照信息20包括支护巷道用的锚杆和锚索的位置、锚杆和锚索的间距、锚杆和锚索的型号和长度等。
43.实施例三:
44.参见图5,在本实施例中,参照信息20显示出了一种矩形巷道。
45.实施例四:
46.参见图6,在本实施例中,参照信息20显示出了一种拱形巷道,并且标示出了拱高、墙高、巷宽等尺寸信息。
47.实施例五:
48.参见图6,在本实施例中,参照信息20显示出了一种微拱形巷道。
49.对本发明的一种可行的实施方式的说明如下:
50.投影仪10可以根据现场需要,通过人工输入不同巷道断面形状(如直墙半圆拱、矩形、微拱等)的尺寸数据后将该种巷道形状的影像通过全断面投影仪10投影在掘进工作面迎头。
51.在本实施例中,投影仪10固定在巷道中,由于投影仪10固定在一点不能移动,而伴随着工作面的不断向前掘进,投影仪10与掘进工作面迎头之间的距离不断增大,如果投影仪10的投影尺寸一直不变会导致实际投影在迎头的影像不断缩小,为解决这个问题,该种投影仪10内设距离计算软件,可以根据投影仪10与掘进工作面之间的距离不断调整投影在掘进工作面迎头的影像大小,保证投影在迎头的影像始终与设计巷道尺寸一致。
52.在本实施例中,该种投影仪10可以将巷道尺寸数据(如巷道高度、巷道宽度、墙高、拱高、喷浆厚度、地坪厚度、后续安装胶带机的位置、水沟尺寸等)投影在掘进工作面迎头,以便于施工人员更直观的了解掘进工作面巷道断面的尺寸数据,提高施工质量。并可以将巷道名称、已掘进的长度、剩余掘进长度、时间投影在工作面迎头,以便于施工人员更直观的进行施工进度控制,如图2、图6所示。
53.只需要一台该投影仪10既可将锚杆和锚索的位置、锚杆和锚索的间距、锚杆和锚索的型号和长度(用不同颜色标注出不同型号的锚杆和锚索)直接投影在掘进工作面迎头,以便于巷道支护人员严格按照投影出的数据进行支护,严格控制工程质量。并且在锚杆钻机上安装红外感应装置、联动控制装置、声光报警器,一旦支护人员使用锚杆钻机施工的钻孔与投影仪10投影出的位置点有偏差时,联动控制装置即刻控制声光报警器发出声光报警信号,用于提醒支护人员,保证现场人员实际支护位置与设计支护位置一致,提高支护质量,如图4所示。
54.在本实施例中,在掘进机的截割部上安装红外感应装置、联动控制装置、声光报警器,一旦掘进机截割部截割过程中截割范围超过投影范围时,联动控制器立刻驱动声光报警器发生声光报警信号提醒掘进机操作人员注意截割范围,严格控制巷道掘进形状与设计形状一致。该装置的原理图如图8所示。
55.从以上的描述中,可以看出,本发明上述的实施例实现了如下技术效果:
56.本发明的巷道掘进方法,包括:向巷道100的工作面110上投射参照信息20,以对巷道100的顶面101、第一侧面102、第二侧面103以及底面104的掘进位置进行定位;根据参照信息20对巷道100掘进预设距离;根据巷道100的掘进距离调整参照信息投射在工作面110上的尺寸,并将参照信息20投射在上一次掘进后形成的工作面110上。采用上述方法,采用激光投影仪等技术将巷道尺寸数据(如巷道高度、巷道宽度、墙高、拱高、喷浆厚度、地坪厚度、后续安装胶带机的位置、水沟尺寸等)投影在掘进工作面迎头,以便于施工人员更直观的了解掘进工作面巷道断面的尺寸数据,提高施工质量,这样,工作人员在施工时可以获得参照,直接将设计的巷道全断面形状投影在掘进工作面迎头,无需工程技术人员进行现场放线,并可以直观地指导掘进机司机进行截割,解决了现有技术中的巷道挖掘容易产生偏差的问题。
57.需要注意的是,这里所使用的术语仅是为了描述具体实施方式,而非意图限制根据本技术的示例性实施方式。如在这里所使用的,除非上下文另外明确指出,否则单数形式也意图包括复数形式,此外,还应当理解的是,当在本说明书中使用术语“包含”和/或“包括”时,其指明存在特征、步骤、操作、器件、组件和/或它们的组合。
58.除非另外具体说明,否则在这些实施例中阐述的部件和步骤的相对布置、数字表达式和数值不限制本技术的范围。同时,应当明白,为了便于描述,附图中所示出的各个部分的尺寸并不是按照实际的比例关系绘制的。对于相关领域普通技术人员已知的技术、方法和设备可能不作详细讨论,但在适当情况下,所述技术、方法和设备应当被视为授权说明书的一部分。在这里示出和讨论的所有示例中,任何具体值应被解释为仅仅是示例性的,而不是作为限制。因此,示例性实施例的其它示例可以具有不同的值。应注意到:相似的标号和字母在下面的附图中表示类似项,因此,一旦某一项在一个附图中被定义,则在随后的附图中不需要对其进行进一步讨论。
59.在本技术的描述中,需要理解的是,方位词如“前、后、上、下、左、右”、“横向、竖向、垂直、水平”和“顶、底”等所指示的方位或位置关系通常是基于附图所示的方位或位置关系,仅是为了便于描述本技术和简化描述,在未作相反说明的情况下,这些方位词并不指示和暗示所指的装置或元件必须具有特定的方位或者以特定的方位构造和操作,因此不能理解为对本技术保护范围的限制;方位词“内、外”是指相对于各部件本身的轮廓的内外。
60.为了便于描述,在这里可以使用空间相对术语,如“在
……
之上”、“在
……
上方”、“在
……
上表面”、“上面的”等,用来描述如在图中所示的一个器件或特征与其他器件或特征的空间位置关系。应当理解的是,空间相对术语旨在包含除了器件在图中所描述的方位之外的在使用或操作中的不同方位。例如,如果附图中的器件被倒置,则描述为“在其他器件或构造上方”或“在其他器件或构造之上”的器件之后将被定位为“在其他器件或构造下方”或“在其他器件或构造之下”。因而,示例性术语“在
……
上方”可以包括“在
……
上方”和“在
……
下方”两种方位。该器件也可以其他不同方式定位(旋转90度或处于其他方位),并且对这里所使用的空间相对描述作出相应解释。
61.此外,需要说明的是,使用“第一”、“第二”等词语来限定零部件,仅仅是为了便于对相应零部件进行区别,如没有另行声明,上述词语并没有特殊含义,因此不能理解为对本技术保护范围的限制。
62.以上所述仅为本发明的优选实施例而已,并不用于限制本发明,对于本领域的技术人员来说,本发明可以有各种更改和变化。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1