智能手机伪距多路径误差提取方法
1.本发明属于gnss定位技术领域,特别是一种智能手机伪距多路径误差提取方法。
背景技术:
2.卫星导航定位技术的不断发展和低成本芯片组性能的提升,使得基于智能手机的位置服务受到国内外学者的广泛关注。目前,研究人员对智能手机的数据质量和定位算法已经进行了大量研究,发现智能手机的gnss观测数据与测地型接收机的观测数据间存在较大差异,因此适用于接收机的定位算法不能完全应用于智能手机定位。通过分析手机载波相位观测数据和修复模糊度,能够实现厘米级的定位精度。智能手机芯片性能的提升使得越来越多的卫星种类可以被手机接收到,bds的增加可以显著提高智能手机定位精度。然而这些调查是在开阔环境下进行的,在建筑物密集的城市环境下,智能手机受到强烈的多径干扰,定位精度明显下降。现实情况下,多路径误差很难参数化,因此需要对手机多路径进行深入研究。
3.多路径作为影响数据质量和定位准确性的主要因素之一,近年来已有许多学者对其进行研究,这些研究大体可以分为两类:基于硬件的处理策略和基于软件的处理策略。基于硬件的方法主要通过添加扼流圈或改善天线增益来缓解多径信号,但这些方法只能消除部分多径误差,同时会增加观测值的噪声水平。此外,这些方法成本较高且硬件较为复杂,无法适用于智能手机。基于软件的策略包括使用cnr来削弱载波观测中的多径,利用cnr数据的幅度和频率量化多径误差,以及通过预校准cnr消除大部分多径。然而,这些方法需要连续长时间的反复收集数据,不适合智能手机的多径误差提取。因此,一种针对手机的多路径误差提取方法对发展手机高精度定位具有重要意义。
技术实现要素:
4.基于上述背景技术,针对现有技术的不足。本发明目的是提出一种智能手机伪距多路径误差提取方法,通过利用智能手机伪距和载波观测值构造code-minus-carrier(cmc)观测值并计算cmc残差;使用vmd与dwt结合的方法从cmc残差中提取智能手机伪距多路径误差,有利于手机高精度定位的实现。
5.为实现上述发明目的,本发明采用的技术方案为:
6.一种智能手机伪距多路径误差提取方法,包括以下步骤:
7.s1、利用智能手机伪距和载波观测值构造code-minus-carrier(cmc)观测值并计算cmc残差;
8.s2、利用vmd分解各卫星的cmc残差,并将分解后的成分分成三部分;
9.s3、利用小波变换对分解得到的各成分进行降噪,其中,中心频率大于20mhz的成分,使用软阈值函数降噪,中心频率在1-20mhz之间的成分,使用自适应阈值函数降噪,中心频率小于1mhz的成分则直接剔除;
10.s4、将处理后的各成分重构获得所提取的多路径误差。
11.在优选的实施方案中,s1中,利用智能手机伪距和载波观测值构造code-minus-carrier(cmc)观测值并计算cmc残差,cmc计算方程如下:
[0012][0013]
其中,p,分别代表伪距和载波相位观测值,λ代表gnss信号波长,i代表电离层延迟,n代表载波模糊度,m
p
,分别代表伪距和载波的多路径,ε
p
,分别代表伪距和载波的观测噪声。
[0014]
由于载波测量的最大多径误差仅为几厘米,并且伪距测量的观测噪声远高于载波相位测量的观测噪声。因此,可以忽略载波相位的多径误差和噪声。频带低于0.1mhz的电离层延迟可以视为偏差。一旦周跳和时钟跳跃被正确检测并修复,整周模糊度也可以视作常数处理。因此,可以通过滑动平均(ma)估计电离层误差和整周模糊度,表示为:
[0015][0016]
式中,m表示ma窗口的大小,ma可以被看作是一种低通滤波,n代表观测历元。m的选择对于数据处理会产生很大影响,当m为500时,信号中的多径频率分量被尽可能多的保存下来。
[0017]
经过处理后,cmc残差可以表示为:
[0018][0019]
式中,ε
n,ma
表示ma方法引入的观测噪声。值得注意的是,处理后的多路径残差仍然包含不可忽略的噪声。
[0020]
在优选的实施方案中,s2中,利用vmd对s1中得到的cmc残差进行分解,将cmc残差分解为三个本征模函数,其中各模态计算公式可以表示为:
[0021][0022]
式中,代表残差的维纳滤波结果,代表拉格朗日算子,ω为模态功率谱的中心频率,为原始信号f的傅里叶变换结果,α为二次惩罚项,τ为更新参数,n表示观测历元,k表示分解模态数,在本文提出的方法中,k=3.通过逆傅里叶变换将频率域结果转换至时域结果。
[0023]
在优选的实施方案中,s3中,用小波变换对s2分解得到的各成分进行降噪,其中中
心频率大于20mhz的成分,使用软阈值函数降噪,中心频率在1-20mhz之间的成分,使用自适应阈值函数降噪,中心频率小于1mhz的成分则直接剔除,软阈值函数自适应阈值函数公式如下:
[0024][0025][0026]
式中,sgn(
·
)代表标志函数,代表离散小波变换后的第j层的第k个小波系数,其中j是小波重建层的总数。此外,阈值通过下式计算得到:
[0027][0028][0029]
式中,σj代表噪声标准偏差,nj代表当前重建层的长度。在上述阈值函数的组合中,软阈值函数用来去除cmc中的高频分量,自适应阈值函数则用来剔除多径误差中的噪声分量。
[0030]
本发明的有益效果是:考虑到手机数据伪距多路径误差的低频特性,利用变分模态分解(variational mode decomposition,vmd)和小波变换(wavelet transform,wt)结合的方法提取手机多路径误差。本方法计算结果削弱了观测噪声对多径提取结果的影响,结果可靠性更强,有利于手机高精度定位的实现。
附图说明
[0031]
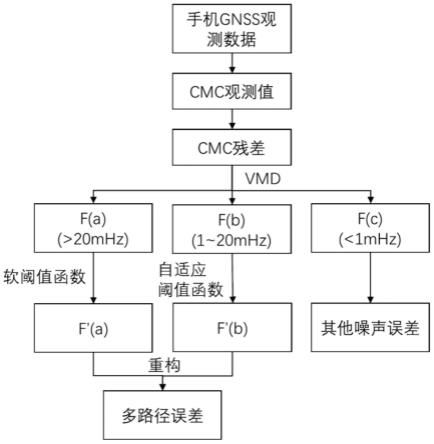
图1为本发明的方法流程图;
[0032]
图2为不同方法cmc提取结果示意图;
[0033]
图3为使用dwt,vmd,vmd+dwt方法后cmc的rms结果示意图;
[0034]
图4为定位测试弱多径环境图示意图;
[0035]
图5为定位测试强多径环境图示意图;
[0036]
图6为不同设备多径处理前后定位结果示意图。
具体实施方式
[0037]
下面结合附图和具体实例对本发明的技术方案作进一步详细说明。
[0038]
如图1-6所示,一种智能手机伪距多路径误差提取方法,包括以下步骤:
[0039]
s1、利用智能手机伪距和载波观测值构造code-minus-carrier(cmc)观测值并计算cmc残差;
[0040]
s2、利用vmd分解各卫星的cmc残差,并将分解后的成分分成三部分;
[0041]
s3、利用小波变换对分解得到的各成分进行降噪,其中,中心频率大于20mhz的成分,使用软阈值函数降噪,中心频率在1-20mhz之间的成分,使用自适应阈值函数降噪,中心频率小于1mhz的成分则直接剔除;
[0042]
s4、将处理后的各成分重构获得所提取的多路径误差。
[0043]
在优选的实施方案中,s1中,利用智能手机伪距和载波观测值构造code-minus-carrier(cmc)观测值并计算cmc残差,cmc计算方程如下:
[0044][0045]
其中,p,分别代表伪距和载波相位观测值,λ代表gnss信号波长,i代表电离层延迟,n代表载波模糊度,m
p
,分别代表伪距和载波的多路径,ε
p
,分别代表伪距和载波的观测噪声。
[0046]
由于载波测量的最大多径误差仅为几厘米,并且伪距测量的观测噪声远高于载波相位测量的观测噪声。因此,可以忽略载波相位的多径误差和噪声。频带低于0.1mhz的电离层延迟可以视为偏差。一旦周跳和时钟跳跃被正确检测并修复,整周模糊度也可以视作常数处理。因此,可以通过滑动平均(ma)估计电离层误差和整周模糊度,表示为:
[0047][0048]
式中,m表示ma窗口的大小,ma可以被看作是一种低通滤波,n代表观测历元。m的选择对于数据处理会产生很大影响,当m为500时,信号中的多径频率分量被尽可能多的保存下来。
[0049]
经过处理后,cmc残差可以表示为:
[0050][0051]
式中,ε
n,ma
表示ma方法引入的观测噪声。值得注意的是,处理后的多路径残差仍然包含不可忽略的噪声。
[0052]
在优选的实施方案中,s2中,利用vmd对s1中得到的cmc残差进行分解,将cmc残差分解为三个本征模函数,其中各模态计算公式可以表示为:
[0053][0054]
式中,代表残差的维纳滤波结果,代表拉格朗日算子,ω为模态功率谱的
中心频率,为原始信号f的傅里叶变换结果,α为二次惩罚项,τ为更新参数,n表示观测历元,k表示分解模态数,在本文提出的方法中,k=3.通过逆傅里叶变换将频率域结果转换至时域结果。
[0055]
在优选的实施方案中,s3中,用小波变换对s2分解得到的各成分进行降噪,其中中心频率大于20mhz的成分,使用软阈值函数降噪,中心频率在1-20mhz之间的成分,使用自适应阈值函数降噪,中心频率小于1mhz的成分则直接剔除,软阈值函数自适应阈值函数公式如下:
[0056][0057][0058]
式中,sgn(
·
)代表标志函数,代表离散小波变换后的第j层的第k个小波系数,其中j是小波重建层的总数。此外,阈值通过下式计算得到:
[0059][0060][0061]
式中,σj代表噪声标准偏差,nj代表当前重建层的长度。在上述阈值函数的组合中,软阈值函数用来去除cmc中的高频分量,自适应阈值函数则用来剔除多径误差中的噪声分量。
[0062]
首先利用不同卫星观测数据对所提出方法的效果进行验证。观测数据选取各系统观测时间最长的cmc序列,为了更好地体现所提出方法的性能,将提取结果与仅使用vmd和仅使用dwt方法所提取的结果进行对比,结果如图2所示。可以发现,利用dwt或vmd能够在一定程度上对原始信号进行降噪处理,但dwt会使得低频分量丢失过多,失去原有信号特性,而vmd则会出现噪声处理不彻底的现象。本发明提出的基于vmd和dwt提出的多级处理方法既能够在保证原有信号特性的基础上有效消除噪声,实现多径信号的准确提取。
[0063]
对本发明提出的多路径提取方法的鲁棒性进行评估,对不同型号的智能手机的实验数据进行分析。由于无法预测多路径误差的实际值,因此采用均方根rms评估方法的性能。通过不同方法处理过的cmc数据统计结果如图3所示。不同智能手机对于同一卫星的rms并不相同,与华为p30(hw30)和华为p40(hw40)相比,小米8(mi8)的cmc更为稳定,这表明其天线具有很强的抗噪声能力。对不同设备的cmc观测序列,采用vmd和dwt结合的多级多路径处理方法后,噪声都得到有效削弱,体现出了该方法降噪的优越性。
[0064]
为进一步测试提出的方法的性能,在不同多径环境下进行单点定位测试,测试点
位环境如图4和图5所示。利用本发明计算得到的多路径误差对观测数据进行处理,处理前后数据的单点定位结果如图6所示。可以看出,采用提出的多路径处理方法后,在弱多径环境下,mi 8智能手机定位n、e、u三个方向的定位中误差由1.082m、1.262m、2.617m提升至0.798m、0.932m和1.852m,平面精度提升26%,高程精度提升29%。在强多径环境下,多径对于信号干扰较为严重,手机定位精度明显下降,平面和高程精度仅为6.072m和7.664m,经过多径处理后平面和高程定位效果分别提升31%和37%,但由于其他未建模误差的影响,定位效果和弱多径环境下的定位效果还存在一定距离。分析hw30和hw40的定位结果,可以得出相同结论。在多径干扰较弱的环境下,huawei手机平面定位精度和高程定位精度平均提升0.216m和0.571m;而在多径干扰较为严重的环境下,两款huawei手机平面和高程的定位精度至少达到了20%以上和10以上。上述结果可以看出提出的多径提取方法,在不同手机上都展示出较好的适用性,在手机多径提取方面展示出良好的性能。以上实施例仅为说明本发明的技术思想,不能以此限定本发明的保护范围,凡是按照本发明提出的技术思想,在技术方案基础上所做的任何改动,均落入本发明保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1