用于偏折测量的超景深镜头及其偏折测量系统与测量方法
1.本发明属于光学工程技术领域,具体为一种用于偏折测量的超景深镜头及其偏折测量系统与测量方法。
背景技术:
2.随着现代光学的发展,大口径非球面光学元件由于具有可优化像质,减轻系统结构,降低成本等优异性能,已成为强激光系统和空间光学等重要领域不可或缺的关键元件,其超精密加工和检测技术是现代光学的前沿研究方向之一。单目偏折术因其具有检测动态范围大、系统简单、测量精度高等优点,非常适用于大口径非球面光学元件的面形检测而受到广泛关注。其原理是显示屏产生编码条纹,ccd相机获取经待测元件反射的变形条纹,结合系统标定信息,通过反射定律获得待测元件表面梯度信息,进而得到光学元件三维面形。然而,目前偏折术使用的传统镜头和ccd相机景深有限,特别是针对大口径复杂光学元件,由于成像景深小,导致检测范围大大减小。另外,传统镜头相机采用的的小孔成像模型,较小的孔光孔径使得曝光时间增加,导致引入的噪声干扰增大和检测效率降低的问题。
技术实现要素:
3.本发明的目的在于提供一种基于波前编码的超景深偏折测量技术,以解决目前偏折术中存在的成像景深不足,检测范围小,效率低的问题,以提高测量效率和应用范围。
4.本发明的技术解决方案如下:
5.一种用于偏折测量的超景深镜头,其特点在于,包括沿光轴依次排列的第一透镜、第二透镜、奇次位相编码板、第三透镜、第四透镜和ccd探测器保护玻璃窗口;
6.所述第一透镜的前表面为凸面、后表面为平面;
7.所述第二透镜为双胶合透镜,第一胶合件的前表面为凸面、后表面为凹面,第二胶合件的前表面为凸面、后表面为凹面;
8.所述奇次位相编码板的前表面为相位面、后表面为平面;
9.所述第三透镜)是由双凹透镜和双凸透镜胶合而成的双胶合透镜;
10.所述第四透镜为双凸透镜。
11.优选的,所述第一透镜前表面曲率半径为83.18mm,所述第一透镜后表面和第二透镜前表面之间的距离是5.31mm;所述第二透镜中第一胶合件前表面曲率半径为18.07mm,后表面曲率半径为56.00mm,第二胶合件前表面曲率半径为56.00mm,后表面曲率半径为10.79mm,所述第二透镜后表面和第三透镜前表面之间的距离是17.73mm;所述第三透镜中,第一胶合件前表面曲率半径为-36.98mm,后表面曲率半径为45.05mm,第二胶合件前表面曲率半径为45.05mm,后表面曲率半径为-25.22mm,所述第三透镜后表面和第四透镜前表面之间的距离是5.31mm;所述第四透镜前表面曲率半径为72.78mm,后表面曲率半径为-93.39mm。所述奇次位相编码板的前表面和所述第二透镜后表面之间距离是10.822mm,所述奇次位相编码板的后表面和所述第三透镜前表面之间距离是3.909mm。
12.所述奇次位相编码板的前表面的面型是:
13.z=a(x3+y3)x,y∈[-7,7]
[0014]
其中,a=9.2657
×
10-5
mm,a是奇次相位板面形方程系数,x,y是相位板横纵归一化坐标。
[0015]
一种偏折测量系统,包括液晶显示屏和ccd相机,其特点在于,在所述的ccd相机上安装有所述的超景深镜头。
[0016]
一种利用所述的偏折测量系统进行光学元件面形偏折测量方法,其特点在于,包括如下步骤:
[0017]
①
标定偏折测量系统:确定液晶显示屏、待测元件、ccd相机之间的空间位置关系;
[0018]
②
所述液晶显示屏依次显示编码正弦条纹,利用所述超景深镜头和ccd相机,拍摄经待测元件反射后的变形条纹;
[0019]
③
通过相移法对拍摄得到的包含待测元件面形信息的变形条纹进行相位解包,结合步骤
①
得到所述偏折测量系统的标定信息,获得待测元件梯度数据,最后通过积分法实现待测元件三维面形检测。
[0020]
与现有技术相比,本发明的有益效果如下:
[0021]
1)本发明提出的基于波前编码的超景深偏折术可扩大成像景深,进而扩大检测范围。同时,超景深镜头相比于传统镜头,通光孔径大,曝光时间短,可提高成像效率。
[0022]
2)本发明解决了目前偏折测量技术中,尤其是针对大口径复杂光学元件的检测,存在的成像景深不足,检测范围小,效率低的难题,对偏折术测量的适用范围扩大和效率提升有重要意义。
附图说明
[0023]
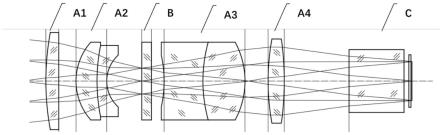
图1为本发明超景深镜头光学结构;
[0024]
图2为偏折测量系统;
[0025]
图3是不同检测方法得到的面形误差图,其中,a是使用传统镜头偏折测量技术得到的待测元件面形结果,b是使用含波前编码的超景深镜头偏折测量技术得到的待测元件面形结果,c是使用传统镜头偏折测量技术得到的面形和干涉仪检测结果的面形误差,d是使用含波前编码的超景深镜头得到的面形和干涉仪检测结果的面形误差。
具体实施方式
[0026]
下面通过实施例结合附图进一步说明本发明。
[0027]
图1为超景深镜头光学结构,如图所示,一种用于偏折测量的超景深镜头,包括沿光轴依次排列的第一透镜a1、第二透镜a2、奇次位相编码板b、第三透镜a3、第四透镜a4和ccd相机保护玻璃窗口c。所述第一透镜a1的前表面为凸面、后表面为平面;所述第二透镜a2为双胶合透镜,第一胶合件的前表面为凸面、后表面为凹面,第二胶合件的前表面为凸面、后表面为凹面;所述奇次位相编码板b的前表面为相位面、后表面为平面;所述第三透镜a3是由双凹透镜和双凸透镜胶合而成的双胶合透镜;所述第四透镜a4为双凸透镜。
[0028]
本实施例中第一透镜a1的前表面曲率半径为83.18mm,第一透镜a1的后表面和第二透镜a2的前表面之间的距离是5.31mm。第二透镜a2中第一胶合件前表面曲率半径为
18.07mm、后表面曲率半径为56.00mm,第二胶合件前表面曲率半径为56.00mm、后表面曲率半径为10.79mm。第二透镜a2的后表面和第三透镜a3的前表面之间的距离是17.73mm。第三透镜中,第一胶合件前表面曲率半径为-36.98mm、后表面曲率半径为45.05mm,第二胶合件前表面曲率半径为45.05mm、后表面曲率半径为-25.22mm。第三透镜a3的后表面和第四透镜a4的前表面之间的距离是5.31mm。第四透镜a4的前表面曲率半径为72.78mm、后表面曲率半径为-93.39mm。奇次位相编码板b的前表面和第二透镜a2的后表面之间距离是10.822mm。奇次位相编码板b的后表面和所述第三透镜a3的前表面之间距离是3.909mm。奇次位相编码板b的前表面的面型是:
[0029]
z=a(x3+y3)x,y∈[-7,7]
[0030]
其中,a=9.2657
×
10-5
mm,a是奇次相位板面形方程系数。
[0031]
搭建一套如图2所示的单目偏折术测量系统,主要包括:相机(hikrobot mv-ch050-10uc、2448
×
2048像素)、lcd屏幕(1920
×
1080像素,单像素尺寸0.274mm)、待测镜(半径为100mm的凹面镜)。将待测镜水平放置在测量平台的任意位置处,并进行偏折测量实验。实验分别使用含波前编码的超景深镜头(如图1所示)和传统镜头,并将zygo干涉仪的测量结果作为参考。具体包括如下步骤:
[0032]
①
标定偏折测量系统:确定液晶显示屏、待测元件、ccd相机之间的空间位置关系;
[0033]
②
所述液晶显示屏依次显示编码正弦条纹,利用所述超景深镜头和ccd相机,拍摄经待测元件反射后的变形条纹;
[0034]
③
通过相移法对拍摄得到的包含待测元件面形信息的变形条纹进行相位解包,结合步骤
①
得到所述偏折测量系统的标定信息,获得待测元件梯度数据,最后通过积分法实现待测元件三维面形检测。
[0035]
图3(a)-3(b)是使用传统镜头和含波前编码的超景深镜头得到的面形结果,图3(c)-3(d)是使用传统镜头和含波前编码的超景深镜头得到的面形和干涉仪检测结果的面形误差。与干涉仪检测结果相比,本发明基于传统镜头的单目偏折术和基于波前编码超景深镜头的单目偏折术的面形检测误差rms值分别是4.61nm和1.21nm。
[0036]
实验表明,本发明方法的面形重构误差减小了约4倍。因此,本发明解决了目前偏折测量技术中,存在的成像景深不足的难题,对偏折术测量精度提升有重要意义。
[0037]
以上所述的具体实施例,对本发明的目的、技术方案和有益效果进行了进一步详细术说明,应理解的是,以上所述仅为本发明的具体实施例而已,并不用于限制本发明,凡在本发明的精神和原则之内,所做的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1