复合机器人作业中底盘停靠点的生成方法、装置以及设备与流程
本申请涉及机器人,特别是涉及一种复合机器人作业中底盘停靠点的生成方法、装置、计算机设备和存储介质。
背景技术:
1、随着机器人技术的发展,机器人的安全性和操作的简洁性、灵活性不断提高,优势得到了充分发挥,在越来越多的领域得到了应用,包括焊接、无人零售、装配、物流、医疗、教育等。
2、复合机器人是移动机器人的一种,复合机器人同时具备移动和操作两大能力,移动由机器人的底盘实现,操作功能通过机器人的机械臂实现。复合机器人要完成作业,需要先规划底盘的停靠点,然后求解机械臂的位姿,最后分别执行底盘和机械臂的控制。
3、目前,机器人底盘停靠点的确定,主要采用人工标注的方式。具体地,在部署停靠点时,通过操作人员的经验,人为确定一个位置点作为机器人底盘停靠点,然后通过实际验证的方式确定机器人底盘停靠点是否可行,这种方式需要对位置点进行多次调整和验证,部署时间长,效率低。
技术实现思路
1、基于此,本申请的目的在于,提供一种复合机器人作业中底盘停靠点的生成方法、装置、计算机设备和存储介质,其可提高机器人底盘停靠点的部署效率。
2、根据本申请实施例的第一方面,提供一种复合机器人作业中底盘停靠点的生成方法,包括如下步骤:
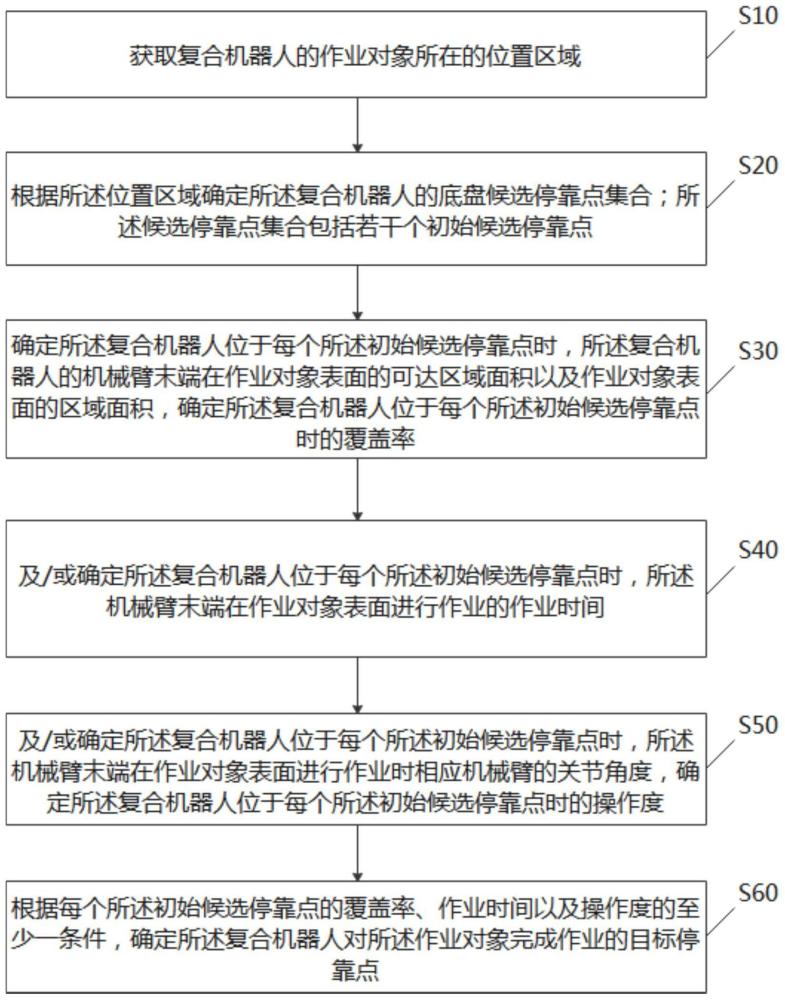
3、获取复合机器人的作业对象所在的位置区域;
4、根据所述位置区域确定所述复合机器人的底盘候选停靠点集合;所述候选停靠点集合包括若干个初始候选停靠点;
5、确定所述复合机器人位于每个所述初始候选停靠点时,所述复合机器人的机械臂末端在作业对象表面的可达区域面积以及作业对象表面的区域面积,确定所述复合机器人位于每个所述初始候选停靠点时的覆盖率;
6、及/或确定所述复合机器人位于每个所述初始候选停靠点时,所述机械臂末端在作业对象表面进行作业的作业时间;
7、及/或确定所述复合机器人位于每个所述初始候选停靠点时,所述机械臂末端在作业对象表面进行作业时相应机械臂的关节角度,确定所述复合机器人位于每个所述初始候选停靠点时的操作度;
8、根据每个所述初始候选停靠点的覆盖率、作业时间以及操作度的至少一条件,确定所述复合机器人对所述作业对象完成作业的目标停靠点。
9、根据本申请实施例的第二方面,提供一种复合机器人作业中底盘停靠点的生成装置,包括:
10、位置区域获取模块,用于获取复合机器人的作业对象所在的位置区域;
11、停靠点集合确定模块,用于根据所述位置区域确定所述复合机器人的底盘候选停靠点集合;所述候选停靠点集合包括若干个初始候选停靠点;
12、覆盖率确定模块,用于确定所述复合机器人位于每个所述初始候选停靠点时,所述复合机器人的机械臂末端在作业对象表面的可达区域面积以及作业对象表面的区域面积,确定所述复合机器人位于每个所述初始候选停靠点时的覆盖率;
13、作业时间确定模块,用于及/或确定所述复合机器人位于每个所述初始候选停靠点时,所述机械臂末端在作业对象表面进行作业的作业时间;
14、操作度确定模块,用于及/或确定所述复合机器人位于每个所述初始候选停靠点时,所述机械臂末端在作业对象表面进行作业时相应机械臂的关节角度,确定所述复合机器人位于每个所述初始候选停靠点时的操作度;
15、目标停靠点确定模块,用于根据每个所述初始候选停靠点的覆盖率、作业时间以及操作度的至少一条件,确定所述复合机器人对所述作业对象完成作业的目标停靠点。
16、根据本申请实施例的第三方面,提供一种计算机设备,包括:处理器和存储器;其中,所述存储器存储有计算机程序,所述计算机程序适于由所述处理器加载并执行如上述任意一项所述的复合机器人作业中底盘停靠点的生成方法。
17、根据本申请实施例的第四方面,提供一种计算机可读存储介质,其上储存有计算机程序,该计算机程序被处理器执行时实现如上述任意一项所述的复合机器人作业中底盘停靠点的生成方法。
18、本申请实施例通过获取复合机器人的作业对象所在的位置区域;根据所述位置区域确定所述复合机器人的底盘候选停靠点集合;所述候选停靠点集合包括若干个初始候选停靠点;确定所述复合机器人位于每个所述初始候选停靠点时,所述复合机器人的机械臂末端在作业对象表面的可达区域面积以及作业对象表面的区域面积,确定所述复合机器人位于每个所述初始候选停靠点时的覆盖率;及/或确定所述复合机器人位于每个所述初始候选停靠点时,所述机械臂末端在作业对象表面进行作业的作业时间;及/或确定所述复合机器人位于每个所述初始候选停靠点时,所述机械臂末端在作业对象表面进行作业时相应机械臂的关节角度,确定所述复合机器人位于每个所述初始候选停靠点时的操作度;根据每个所述初始候选停靠点的覆盖率、作业时间以及操作度的至少一条件,确定所述复合机器人对所述作业对象完成作业的目标停靠点。本申请无需人工手动确定复合机器人底盘停靠点,提高了复合机器人底盘停靠点部署效率。
19、应当理解的是,以上的一般描述和后文的细节描述仅是示例性和解释性的,并不能限制本申请。
20、为了更好地理解和实施,下面结合附图详细说明本发明。
技术特征:
1.一种复合机器人作业中底盘停靠点的生成方法,其特征在于,所述方法包括如下步骤:
2.根据权利要求1所述的复合机器人作业中底盘停靠点的生成方法,其特征在于:
3.根据权利要求2所述的复合机器人作业中底盘停靠点的生成方法,其特征在于:
4.根据权利要求3所述的复合机器人作业中底盘停靠点的生成方法,其特征在于:
5.根据权利要求4所述的复合机器人作业中底盘停靠点的生成方法,其特征在于:
6.根据权利要求3所述的复合机器人作业中底盘停靠点的生成方法,其特征在于:
7.根据权利要求3所述的复合机器人作业中底盘停靠点的生成方法,其特征在于:
8.根据权利要求3所述的复合机器人作业中底盘停靠点的生成方法,其特征在于:
9.根据权利要求1至8任意一项权利要求所述的复合机器人作业中底盘停靠点的生成方法,其特征在于:
10.一种复合机器人作业中底盘停靠点的生成装置,其特征在于,包括:
11.一种计算机设备,包括:处理器、存储器以及存储在所述存储器中并可在所述处理器上运行的计算机程序,其特征在于,所述处理器执行所述计算机程序时实现如权利要求1至9任意一项所述方法的步骤。
12.一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现如权利要求1至9任意一项所述方法的步骤。
技术总结
本申请涉及一种复合机器人作业中底盘停靠点的生成方法、装置以及设备,该方法包括:获取复合机器人的作业对象所在的位置区域;根据所述位置区域确定所述复合机器人的底盘候选停靠点集合;确定所述复合机器人位于每个所述初始候选停靠点时的覆盖率、作业时间以及操作度;根据每个所述初始候选停靠点的覆盖率、作业时间以及操作度的至少一条件,确定所述复合机器人对所述作业对象完成作业的目标停靠点,提高了复合机器人底盘停靠点部署效率。
技术研发人员:张会文
受保护的技术使用者:广州视源电子科技股份有限公司
技术研发日:
技术公布日:2024/3/4
- 还没有人留言评论。精彩留言会获得点赞!