一种柔性生物传感器及其制备方法与应用
1.本发明涉及一种柔性生物传感器,具体涉及一种具有良好生物相容性的柔性生物传感器。该柔性生物传感器可应用于电子皮肤、新型医疗植入、可穿戴设备与仿生机器人等领域。
背景技术:
2.传统生物传感器受到材料刚性的阻碍,在较大的弯曲或拉伸变形中其封装层材料容易发生不可逆转的形变,从而使电子器件发生损坏。近些年来,柔性生物传感器的研究与发展越来越受到人们的关注,在电子皮肤、新型医疗植入、可穿戴设备与仿生机器人等领域展现出巨大发展。
3.柔性生物传感器作为探测机体信号最底层的器件,在生物信号探测的过程中显得尤为重要,良好的柔性生物传感器能够准确及时地采集生物信号。通过采集到的信号反应人体当前状况,从而达到健康监测和医疗的目的。由于人类皮肤表面褶皱弯曲的特性,使得以传统金属和半导体硅材料作为传感器基础材料的器件与人体集成时显得略有不足。
4.柔性生物传感器的拉伸弯曲性能主要取决于封装层材料,目前常采用pi、pet、pen等材料作为传感器的封装层,尽管此类封装层具有一定的弯曲和拉伸性能,但是作为工程塑料质地大多并不柔软,缺乏弹性和黏附性,更重要的是不具有生物相容性,这也是限制目前柔性生物传感器在相关领域中进一步应用的重要原因之一。事实上,为了从人体中准确地收集信息,良好的黏附性、灵活性、可拉伸性一直是生物传感器研究领域中关注的重点,而良好的生物相容性将为生物传感器走向人体长时间穿戴乃至植入提供重要保障。
5.因此,如何提供一种具有良好生物相容性的柔性生物传感器是本领域技术人员亟待解决的技术难题。
技术实现要素:
6.有鉴于此,本发明针对传统生物传感器生物相容性差、柔性差、易失效等问题,提供了一种具有良好生物相容性的柔性生物传感器的制备方法。
7.需要说明的是,本发明着眼上述问题,通过将材料改性、静电纺丝、增材制造等技术特点进行综合,创新性地提出了一种以良好生物相容性的硅胶作封装层、复合压电材料pvdf薄膜作传感层并具有“三明治”结构特点的柔性压电式生物传感器的设计与制备方法。静电纺丝在纺丝过程中不仅具有对材料拉伸和极化的能力,还会产生有序纤维薄膜,因此,特别适用于pvdf薄膜的制备,技术操作简单、生产效率高。
8.为了实现上述目的,本发明提供如下技术方案:
9.一种柔性生物传感器的制备方法,具体包括如下步骤:
10.1)制备硅胶封装层:将硅胶溶液倒在旋涂机上旋涂形成硅胶膜,并放入烘箱中固化,即形成硅胶封装层;
11.2)制备带有电极的上、下封装层:将所述硅胶封装层置于3轴移动平台上,采用滴
铸成型技术在所述硅胶封装层中间形成石墨烯层,风干后即形成石墨烯电极,所述石墨烯电极与所述硅胶封装层共同形成所述柔性生物传感器的封装层;重复操作,制作另一块柔性生物传感器的封装层,随后将铜箔粘贴在所述石墨烯电极上,即得到带有电极的上、下封装层;
12.3)制备压力感应膜:采用静电纺丝技术在铝箔纸表面形成一层致密、有序且连续的复合pvdf薄膜,即为所述柔性传感器的压力感应膜;
13.4)封装:将带有电极的下封装层、压力感应膜、带有电极的上封装层依次堆叠在一起,在上、下封装层边缘涂抹南大705硅橡胶,长按边缘即使得上、下封装层紧密贴合在一起,即完成柔性生物传感器的封装,形成了具有良好生物相容性的柔性生物传感器。
14.可选地,步骤1)中,所述硅胶溶液是将硅胶溶剂与其固化剂搅拌均匀,除气旋涂而成;其中,
15.硅胶溶液的材料为道康宁pdms,pdms与固化剂的比例为10:1。
16.进一步的,将所述pdms溶液浇筑到吸附在旋涂机的玻璃上,先以250-350rpm的转速旋转15s,再以300-400rpm的转速旋转30s;随后放入60-80℃的热烘箱中2-4h固化成膜,以作为所述柔性生物传感器的柔性封装层。
17.其中,pdms具有较好的柔韧性和抗拉强度,非常适合作为柔性传感器的封装层材料。
18.可选地,步骤2)中,所述滴铸成型技术的具体操作为:在所述硅胶封装层中间放置一模具,手动推动装有石墨烯溶液的注射器,将石墨烯溶液挤入到模具中,则在硅胶封装层中间形成石墨烯层。
19.具体地,在硅胶封装层上放置中空形状的模具,以乙醇为溶剂,将一定体积、一定浓度的石墨烯溶液滴铸在中空形状的模具中,自然风干后取下模具,则形成了一定尺寸的石墨烯电极。
20.可选地,步骤3)中,所述静电纺丝技术的具体操作为:3轴移动平台的z轴上挂有装有一定体积、一定浓度复合pvdf溶液的注射器(5ml、浓度13%复合pvdf溶液的注射器),注射器上装有22g的针头,针头正下方为一定直径(直径为100mm)的滚筒,滚筒上包裹铝箔纸。调整注射器针头与下方铝箔纸之间的距离,调整电源电压,使其满足静电纺丝发生的条件,电源的正极连接注射器针头的金属部分,负极连接铝箔纸,从而在注射器针头与铝箔纸之间形成高压电场,在微量泵执行机构的推力和静电场力的共同作用下,实现纳米纤维的沉积。
21.需要说明的是,所述的纺丝薄膜材料为掺杂钛酸钡纳米粒子的pvdf混合溶液,该纳米粒子大大提高了pvdf的成核效果。复合pvdf溶液在静电纺丝成膜的过程中,射流同时受到了机械拉伸和高压电极化作用,所成的复合pvdf膜β相含量高,压电效果很好。柔性传感器的性能主要由复合的pvdf薄膜的压电性能决定。由于pvdf中加入了无机材料钛酸钡纳米粒子,因此,钛酸钡的含量对pvdf薄膜的压电性能影响巨大。
22.且,所述的静电纺丝系统由微量泵控制器、微量泵执行机构、滚筒收集机构、注射器活塞筒体和注射器针头等组成。其中,微量泵控制器和微量泵执行机构都具有较好的精度,滚筒收集机构在纺丝过程中不停的旋转,从而形成了尺度可控且有序的薄膜结构。
23.此外,所述的封装材料为特殊的有机胶,能很好的将传感器的上、下封装层强力粘
连。
24.具体地,上述制备方法中存在的原理如下:
25.首先,硅胶溶液利用旋涂工艺,通过控制旋涂机的旋转速度来控制硅胶薄膜的厚度;然后,利用3d打印工艺分别在2块硅胶薄膜表面制作一定尺寸的上、下电极,并分别与外部导线连接;接着,利用静电纺丝技术,将复合的pvdf溶液进行电纺成丝,形成尺度可控且有序的薄膜结构;最后,用特殊粘胶将带有电极的硅胶薄膜与pvdf有序薄膜封装,从而最终形成具有良好生物相容性、高灵敏度的柔性生物传感器。
26.此外,本发明还请求保护利用上述方法制备而得的柔性生物传感器。
27.以及,所述柔性生物传感器在电子皮肤、新型医疗植入、可穿戴设备与仿生机器人中的应用。
28.经由上述的技术方案可知,与现有技术相比,本发明提供的一种柔性生物传感器及其制备方法与应用,具有如下优异效果:
29.1)制作传感器的pdms,石墨烯,pvdf以及钛酸钡纳米粒子均具有良好的生物相容性,不仅可与皮肤组织直接接触,还可长期实时监测人体健康。
30.2)pvdf薄膜制造工艺简单高效、成本低,pvdf溶液中掺杂了纳米粒子,该纳米粒子大大提高了pvdf的成核效果;同时,复合pvdf溶剂在静电纺丝成膜的过程中,射流同时受到了机械拉伸和高压电极化作用,所成的复合pvdf膜β相含量高,压电效果很好。
31.3)石墨烯电极导电性高,延展性好,传感器在大的拉伸或压缩变形下,石墨烯电极导电性能稳定。
32.4)固化后的硅胶封装层,具有较强的拉伸性能好,回弹性好,能承受较大的变形。
33.5)传感器灵敏度高,在um级的变形下就会产生较强的电信号。
34.综上所述,本发明所述制造系统包括旋涂技术、材料改性技术、滴铸成型技术和静电纺丝技术等,成功制造出了具有良好生物相容性的柔性生物传感器。该制造系统简单高效、易于控制、可靠且成本低等优点,制作出的柔性pvdf传感器灵敏度高,适用于电子皮肤、动作监测、新型医疗植入、可穿戴设备与仿生机器人等领域。
附图说明
35.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据提供的附图获得其他的附图。
36.图1为本发明基于静电纺丝的复合pvdf压电薄膜制备图。
37.图2为封装层电极制作示意图。
38.图3为柔性pvdf传感器的示意图。
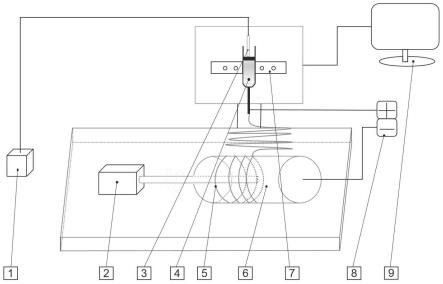
39.图4为pvdf柔性传感器的测试设备原理示意图。
40.图5为pvdf柔性传感器的压力-电压曲线图。
41.图6为pvdf柔性传感器用于动作监测的测试结果图。
具体实施方式
42.下面将结合本发明实施例及说明书附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
43.本发明实施例公开了一种柔性生物传感器的制备方法,采用上述的旋涂工艺、材料改性技术、滴铸成型技术和静电纺丝技术等复合而成。
44.为更好地理解本发明,下面通过以下实施例对本发明作进一步具体的阐述,但不可理解为对本发明的限定,对于本领域的技术人员根据上述发明内容所作的一些非本质的改进与调整,也视为落在本发明的保护范围内。
45.实施例一:
46.将一次性透明塑料杯置于天平上,称取15g的pdms,并加入1.5g的pdms固化剂,手动搅拌该溶液至混合均匀,此时pdms溶液充满气泡。将pdms溶液置于真空锅中直至溶液中的气泡完全消除。接着,将除去气泡的pdms溶液浇筑到吸附在旋涂机的直径为100mm的玻璃上。为了确定合适的pdms封装层厚度,需要对旋涂速度进行研究优化。分别以250,350,400rpm的旋涂速度旋涂pdms,旋涂时间分别设置为5s,10s,15s。通过9组实验发现:250rpm的转速有点小,即使在15s的旋涂时间内也不能完全覆盖整个玻璃;而350和400rpm的转速则可以在15s的时间内覆盖玻璃。
47.此外,为了提高旋涂效果,采用2步旋涂法。第一步,以300rpm的转速旋涂pdms,使得pdms溶液先覆盖在这个玻璃上;第二步,分别用350rpm和400rpm的转速旋涂30s,使更多的pdms被甩出玻璃,从而减小pdms的厚度。
48.经研究发现,400rpm转速的参数下,形成的pdms薄膜约为230um左右,固化后虽然可以从玻璃上剥离,但是由于太薄,很容易造成薄膜的破裂。而350rpm的转速形成的薄膜,厚度约300um,具有一定的强度,可以容易的从玻璃上剥离,考虑到传感器封装层所需的薄而韧的特性,因此,第二步旋涂参数确定为旋涂速度350rpm,旋涂时间30s。最后,以优化的参数旋涂pdms薄膜,即:先以300rpm旋涂15s,再以350rpm旋转30s,然后将覆有pdms的玻璃放入80℃的热烘箱中2h使其固化成膜,即形成了柔性生物传感器的柔性封装层。
49.实施例二:
50.柔性传感器的复合pvdf薄膜由静电纺丝而成,制备原理图如图1所示。首先,分别将0g,0.065g,0.13g和0.26g的钛酸钡纳米粒子分别加入到4个装有5gdmf的烧杯中,超声处理20min使得纳米粒子分散均匀,再分别加入5g的丙酮和1.3g的pvdf形成混合溶液,在55℃下搅拌3h使得pvdf彻底被溶解且混合均匀。静止待溶液中气泡完全消失,从而配置出了4种不同钛酸钡含量的pvdf混合液。当需要静电纺丝时,用10ml的注射器吸取其中一种5ml的溶液,待用。
51.步进电机2和收集滚筒6固定在3轴平台上,滚筒上包裹了一层铝箔。通过计算机控制系统9,使得注射器停靠在滚筒中心的正上方170mm处。高压电源的正极连着注射器的金属针头,负极连着滚筒上的铝箔,设置电压为10kv。在微泵控制器1的控制下,微泵执行机构3精准向下运动挤压注射器内的pvdf混合液4,使得pvdf混合液以2ml/h的速度均匀的流出,注射器也会在计算机控制系统9下做匀速的往复运动,同时,步进电机2控制收集滚筒6以
2000rpm的转速匀速转动,从注射器流出的pvdf混合液4在高压电的作用下形成细丝,朝固定的方向缠绕在收集滚筒上,由于注射器的往复运动,所以在滚筒6上形成的是一片复合pvdf薄膜,通过纺丝时间的控制,即可控制复合pvdf薄膜的厚度。
52.纺丝结束后,将收集滚筒6上带有复合pvdf薄膜的铝箔取下,放入40℃下的热烘箱中加热6h,使得剩余的溶剂完全挥发,复合pvdf薄膜即制备成功。将复合pvdf薄膜修建成2.5
×
2.5cm的正方形,待用。这里需要说明的是,4种复合pvdf薄膜的制备工艺参数,除钛酸钡的含量不同外,其他均相同。
53.实施例三:
54.石墨烯电极的制备示意图如图2所示。柔性传感器的石墨烯电极由滴铸法成型。将pdms封装层真空等离子处理1min30s,并固定于3轴一定平台上。2
×
2cm的中空模具放置在封装层正中间,并手动压紧。将1g的石墨烯片溶解在10ml的乙醇中,形成10%的石墨烯溶液。超声处理20min,使得石墨烯片溶解均匀。取3ml的石墨烯溶液,滴在中空的模具中,风干后将带有石墨烯电极的硅胶封装层从培养皿上撕下,并修剪成4
×
4cm的大小,则形成了带有石墨烯电极的硅胶封装层。按相同的方法,制作另一个带有石墨烯电极的硅胶封装层。分别在2个带有石墨烯电极的硅胶封装层上贴上铜箔条,铜箔条作为引出电信号的导线。
55.实施例四:
56.将其中一个带有石墨烯电极的硅胶封装层置于最底层,其中,由电极的硅胶面朝上。将复合pvdf薄膜置于石墨烯电极之上,在盖上另一个带有石墨烯电极的硅胶封装层,将南大705硅橡胶涂覆在上、下封装层的四周边缘接触处,但并不碰到pvdf薄膜和石墨烯,压紧上、下封装层,使得传感器上、下封装层紧密贴合,从而成功封装了柔性生物传感器。最终形成的柔性传感器上下封装层为40*40*0.3mm,石墨烯电极层尺寸为20*20*0.4mm,复合pvdf薄膜尺寸为25*25*0.2mm,整个三明治结构厚度约为1.2mm,如图3所示。
57.实施例五:
58.以上述方法制备出了4种复合pvdf薄膜的柔性传感器。在如图4的测试设备上测试各传感器的压力响应性。
59.具体地,将商业传感器10安装在支架11上,分别将4种不同的柔性传感器12固定在商业刚性传感器上,柔性传感器的上下电极引线与示波器13相连,从而实时记录柔性传感器的输出电压数据。通过触屏14设置施加力的大小,利用电脑端软件启动,则电机15会驱动滑轨16上的滑块17进行往复运动,滑块上固定有与柔性传感器接触而施力的模具18,从而周期性地对柔性传感器施加压力。这里需要点明的是,整个系统是闭环系统,即当商业传感器达到设定的施加力时,滑块就会立即返回原点,从而达到周期性施加力的效果。整个测试系统固定在减震台19上。通过对柔性传感器施加从4n-40n等不同的力,得到不同的输出电压数据。
60.实施例六:
61.分别对4种柔性传感器在不同的压力下得到的输出电压数据进行分析处理。数据处理方法如下所述:
62.由于示波器具有微弱的杂波信号,因此每组数据中要删掉80mv以下的数据,这些数据都是未接入传感器时的干扰数据,也就是说以80mv为采集到的信号下限。其次,为了尽可能的统计到传感器每次受压时显示的输出信号,以最大正值的2/3为信号上限,这样可以
避免因偶然情况产生的突峰数据,取80mv至最大正值的2/3范围内的数据,计算其平均值,作为传感器在该压力下的输出电压值。
63.实施例七:
64.传感器的工作原理为:当手指对传感器施加压力时,传感器受压而发生形变,由于pvdf的压电效应,产生一个正值的输出电压峰,而当手指离开传感器,传感器恢复形变,不在受力,此时则产生一个负值的输出电压峰。
65.将制造好的传感器贴于鼠标左键上,右手食指经常点击之处。然后,用不同的力,以大约一秒一次的速率去点击鼠标,结果如图6所示。当力度较轻时,产生的输出电压较小,大约为150mv左右。随着右手食指点击传感器力度的增大,输出电压值也在增大,因此可估算出手指点击鼠标的力度。由此可见,该柔性生物传感器可以作为动作监测器件,来监测生活中的一些动作变化行为。
66.以此数据处理方法为基础,对比4种不同传感器的工作性能,结果如图5所示。可以看到,随着钛酸钡含量的不断提升,输出电压值逐渐变大,当加入0.13g的钛酸钡时,柔性传感器的输出信号最大,而当钛酸钡的含量继续增加到0.26g时,传感器的输出电压值变化不大,而且当施加力达到30n时,输出电压值不升返降。究其原因,可能是因为钛酸钡含量的大量增加会导致其在复合薄膜中发生团聚现象,这种情况并不利于pvdf的成核,再考虑到用料成本,操作的便捷性,因此得出结论,当钛酸钡的添加量为pvdf质量的10%时最为合适,复合pvdf薄膜具有较好的压电性能。
67.对所公开的实施例的上述说明,使本领域专业技术人员能够实现或使用本发明。对这些实施例的多种修改对本领域的专业技术人员来说将是显而易见的,本文中所定义的一般原理可以在不脱离本发明的精神或范围的情况下,在其它实施例中实现。因此,本发明将不会被限制于本文所示的这些实施例,而是要符合与本文所公开的原理和新颖特点相一致的最宽的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1