用于预定区域的车辙应对方法和车辙应对系统与流程
本申请涉及一种用于预定区域的车辙应对方法和车辙应对系统。
背景技术:
1、众所周知,车辆的轮胎通常非常昂贵,而路面车辙的深度会直接影响车辆轮胎的使用寿命。已知有部分车辆安装有摄像头或激光雷达来对路面上的车辙进行探测,但是当环境恶劣,尤其是当存在大风、暴雨或者雾霾时,对车辙的定位都会不太精准。尤其在矿区作业时,矿区的工况通常比较恶劣,对车辆轮胎的使用寿命影响更大,而且车辆在矿区的行驶经常没有固定路线,路面的土质也可能不同,因此路面情况变化比较大,而对车辙探测的不精准,使得无法为车辆轮胎提供有效的保护措施。
2、还已知有部分无人车辆配备有传感器,其能够本身基于拓扑地图而生成全局路径,当传感器识别到车辙时,会将其作为障碍物,从而进行避障处理来调整行驶路线。但是这样的方式对车辙的判断不够精准,而且对车辆局部路径规划、运动控制等模块要求也较高,且车辆每次行驶到该处都是重复运算,难免会出现因规划失败或者未提前做出预判而导致的避让失败的情况。
3、因而,需要提供一种车辙应对方法和车辙应对系统,以至少部分地解决上述问题。
技术实现思路
1、本申请的目的在于,提供一种车辙应对方法和车辙应对系统,其可以动态、准确地确定预定区域中的路面车辙信息,从而针对性地提前调整相关车辆要行驶的全局路径,使得车辆只需按照收到的路径进行行驶,因此能够使车辆有效地避开车辙,从而可以避免损坏车辆轮胎。
2、根据本申请的一个方面,提供了一种用于预定区域的车辙应对方法,包括:
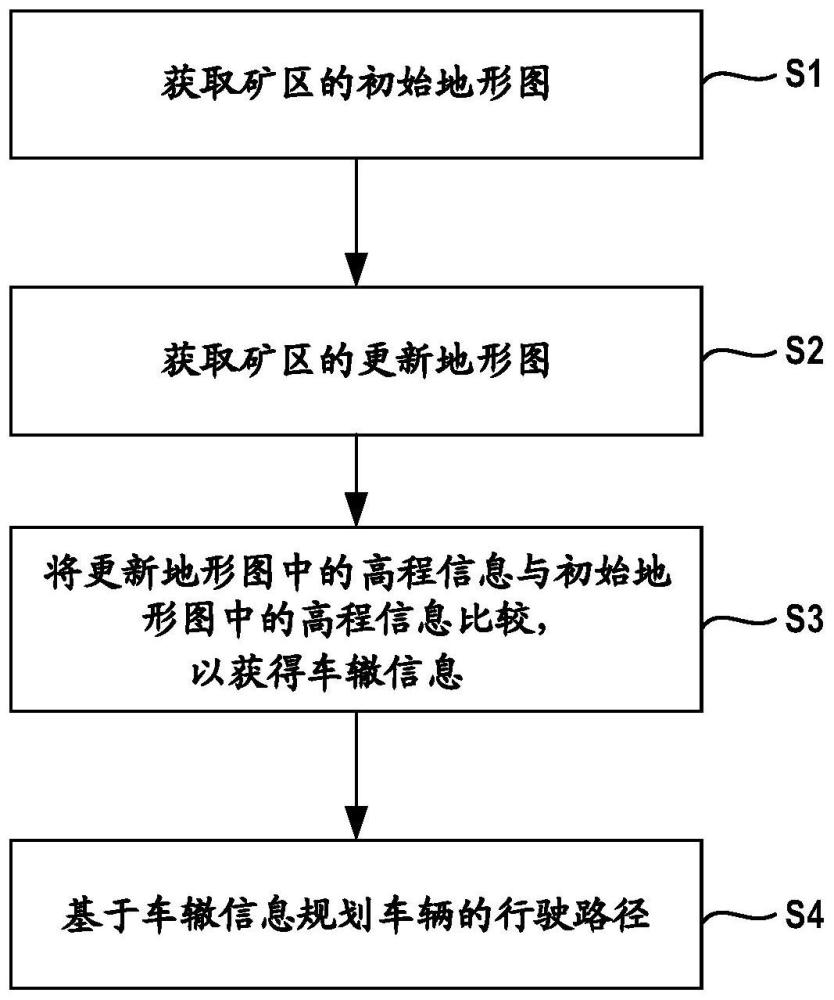
3、获取所述预定区域的初始地形图,所述初始地形图包括所述预定区域中路面的初始高程信息;
4、获取所述预定区域的更新地形图,所述更新地形图包括所述预定区域中路面的更新高程信息;
5、将所述更新高程信息与所述初始高程信息进行比较,获得所述预定区域中路面上车辙的信息,其中,所述车辙为所述更新高程信息与所述初始高程信息之差的绝对值达到第一预定深度的点位;以及
6、基于所述车辙的信息规划车辆在所述预定区域的行驶路径。
7、根据本申请的另一方面,还提供一种车辙应对系统,用于执行上文所述的车辙应对方法,该车辙应对系统包括:
8、第一获取模块,被配置为获取所述预定区域的初始地形图,所述初始地形图包括所述预定区域中路面的初始高程信息;
9、第二获取模块,被配置为获取所述预定区域的更新地形图,所述更新地形图包括所述预定区域中路面的更新高程信息;
10、比较模块,被配置为将所述更新高程信息与所述初始高程信息进行比较,以获得所述预定区域中路面上车辙的信息;以及
11、规划模块,被配置为基于所述车辙的信息规划车辆在所述预定区域的行驶路径。
12、根据本申请的实施方式的车辙应对方法和车辙应对系统,可以将预定区域初始地形图中的初始高程信息与更新地形图中的更新高程信息进行比较,从而能够动态、准确地确定预定区域中的路面车辙信息,进而可针对性地提前调整相关车辆要行驶的全局路径,使得车辆只需按照接收到的路径进行行驶,因此该方案高效、稳定、能够使车辆有效地避开车辙,后台处理系统的算力也能得到充分的应用。
技术特征:
1.一种用于预定区域的车辙应对方法,其特征在于,包括:
2.根据权利要求1所述的车辙应对方法,其特征在于,所述车辆设置有定位设备,用于获取并发送实时位置信息,所述获取所述预定区域的更新地形图的步骤包括:
3.根据权利要求2所述的车辙应对方法,其特征在于,还包括:
4.根据权利要求2所述的车辙应对方法,其特征在于,所述车辆还设置有测量设备,所述测量设备能够获取所述车辆的车辆姿态信息,所述获取所述预定区域的更新地形图的步骤还包括:
5.根据权利要求4所述的车辙应对方法,其特征在于,所述车辆装配有rtk定位设备和/或imu测量设备。
6.根据权利要求4所述的车辙应对方法,其特征在于,所述车辆具有至少一个车轮,所述车辙应对方法还包括:
7.根据权利要求6所述的车辙应对方法,其特征在于,将所述定位设备的所述实时位置信息转换为所述至少一个车轮与地面的接触点处的接触点位置信息的步骤进一步包括:
8.根据权利要求1所述的车辙应对方法,其特征在于,所述基于所述车辙的信息规划车辆在所述预定区域的行驶路径的步骤包括:
9.根据权利要求8所述的车辙应对方法,其特征在于,还包括:
10.根据权利要求8或9所述的车辙应对方法,其特征在于,所述车辙路段包括:所述车辙连续延伸达到预定长度的路段,或者在一预定距离内所述车辙出现次数达到预定次数的路段。
11.根据权利要求9所述的车辙应对方法,其特征在于,所述更新后的行驶路径包括路面上紧靠所述车辙路段一侧的旁边路段。
12.根据权利要求11所述的车辙应对方法,其特征在于,还包括:
13.根据权利要求12所述的车辙应对方法,其特征在于,还包括:
14.根据权利要求13所述的车辙应对方法,其特征在于,所述辅助车辆安装有定位装置,所述车辙应对方法还包括:
15.根据权利要求12所述的车辙应对方法,其特征在于,所述预定阶段为:当调整所述车辆的所述原始行驶路径之后,所述车辙路段所在的路面段被所述车辆行驶过n次,其中n大于或等于20。
16.根据权利要求1所述的车辙应对方法,其特征在于,还包括:
17.根据权利要求1所述的车辙应对方法,其特征在于,所述预定长度限定为大于等于2m,并且/或者所述预定距离为15~20m,并且/或者所述预定次数限定为大于等于5次,并且/或者所述第一预定深度限定为大于等于0.2m。
18.根据权利要求12所述的车辙应对方法,其特征在于,所述期望高度为与所述车辙路段中的车辙的凹陷齐平的高度。
19.根据权利要求1所述的车辙应对方法,其特征在于,所述预定区域为矿区,并且/或者所述车辆为无人驾驶车辆。
20.一种车辙应对系统,用于执行如权利要求1-19中任一项所述的车辙应对方法,其特征在于,包括:
21.根据权利要求20所述的车辙应对系统,其特征在于,所述第二获取模块(102)具体被配置为:
22.根据权利要求21所述的车辙应对系统,其特征在于,所述第二获取模块(102)进一步被配置为:
23.根据权利要求22所述的车辙应对系统,其特征在于,所述车辆装配有rtk定位设备和/或imu测量设备。
技术总结
一种车辙应对方法和车辙应对系统,车辙应对方法包括获取预定区域的初始地形图,初始地形图包括初始高程信息;获取预定区域的更新地形图,更新地形图包括更新高程信息;将更新高程信息与初始高程信息进行比较,获得预定区域中路面上车辙的信息;基于车辙的信息规划车辆在预定区域的行驶路径。
技术研发人员:吕根波,吴向昌,陈维军,张辉,宋建平
受保护的技术使用者:卡特彼勒公司
技术研发日:
技术公布日:2024/3/11
- 还没有人留言评论。精彩留言会获得点赞!