一种光纤陀螺光源相对强度噪声自适应抑制实现方法
1.本发明涉及光纤陀螺技术领域,具体而言,涉及一种光纤陀螺光源相对强度噪声自适应抑制实现方法。
背景技术:
2.光纤陀螺凭借着其测量精度高、灵敏度好、动态范围大、体积小、重量轻、寿命长、易集成等特点,广泛应用于导弹制导、卫星导航、姿态控制等各个领域。随着平台系统性能的不断提升,对于光纤陀螺的检测精度要求也随着升高,因此,如何进一步降低高精度光纤陀螺的噪声,提高检测精度已经成为了近年来领域内的研究热点。影响光纤陀螺检测精度的因素复杂,其中光源相对强度噪声(relative intensity noise,rin)是主要因素之一,因此,世界各研究组织针对光源相对强度噪声抑制开展了系列性研究,并取得了突破性进展,其中,图1即为其中一种抑制方案,是基于强度叠加型的光源相对强度噪声对消方案典型原理图,主要包括光源、50:50保偏耦合器、ns:nr保偏耦合器、集成光学调制器、敏感光纤环、探测器和信号处理模块。
3.图1所示的光源相对强度噪声对消光路方案能够在不破坏光纤陀螺最小互易性结构的基础上,利用同光谱且偏振态垂直的两束光叠加来,通过调整信号光与参考光之间的强度比与延时来达到抑制特征频率点下的相对强度噪声对消的目的。根据光纤陀螺的结构特点,该方案能够在角速率解调频率处有效抑制光源相对强度噪声,提高陀螺的检测信噪比,进一步优化检测精度。然而,在实际的使用中,由于环境影响、器件性能退化等因素,导致信号光路、参考光路的损耗变化,且陀螺参数固定,因此会影响光源相对强度噪声的抑制效果,达不到最佳抑制状态。为此,相关研究组织在此基础上提出了光源相对强度噪声自适应抑制方法,然而在自适应调抑制方案中,需要引入额外的光学与电子器件,结构相对复杂,增加了光路状态的不确定性,也不利于光纤陀螺在小型化、轻质化、低成本的进一步发展。
技术实现要素:
4.本发明旨在提供一种光纤陀螺光源相对强度噪声自适应抑制实现方法,以解决或改善上述技术问题中的至少之一。
5.有鉴于此,本发明的第一方面在于提供一种光纤陀螺光源相对强度噪声自适应抑制实现方法。
6.本发明的第一方面提供了一种光纤陀螺光源相对强度噪声自适应抑制实现方法,第一保偏耦合器,所述第一保偏耦合器的一端分别连接宽谱光源和第二保偏耦合器的第一入射端,所述第一保偏耦合器的另一端连接集成光学调制器,所述集成光学调制器上连接有敏感光纤环,所述第二保偏耦合器的射出端连接光学探测器,所述第二保偏耦合器的第二入射端通过延时光纤与所述第一保偏耦合器另一端相连,所述光学探测器通过信号处理模块连接所述集成光学调制器,所述集成光学调制器内置有模数转换器,所述方法包括如
下步骤:s1,当光源相对强度噪声抑制效果降低时,利用模数转换器以采样频率设置相应的采样时序,并在对应采样时序内进行信号采集,以获得与时序对应的采样点数和采样积分值;s2,根据所述采样点数和所述采样积分值,计算获得到达光电探测器信号的直流分量和峰值;s3,根据所述直流分量和所述峰值,计算获得信号光功率和参考光功率;s4,将所述参考光功率和所述信号光功率进行比值,并根据所述比值进行调制深度的调整,以使所述比值的数值等于1;s5,在所述光纤陀螺工作中,持续重复步骤s1-s4,以达到持续保持光源相对强度噪声在当前状态下的最佳抑制效果。
7.本发明提供的一种光纤陀螺光源相对强度噪声自适应抑制实现方法,能够在不增加任何额外电子、光学元器件的基础上,实现对光源相对强度噪声的自适应抑制功能
8.为了剔除现有强度噪声自适应实现方法中所引入的光学、电子器件,以最简结构实现光纤陀螺光源相对强度噪声自适应抑制方法,在不改变原有光源相对强度噪声抑制方案结构的基础上,利用到达光纤陀螺光电探测器的信号特性,通过设置合适模数转换器的采样频率与采样时序,检测并分离出信号光与参考光的强度,以此为基础,一旦比值发生变化不为1,便通过调整调制深度来进行调整,直至重新恢复强度比为1的状态;
9.该方案能够在在不增加任何额外电子、光学元器件的基础上,实现对光源相对强度噪声的自适应抑制功能,在进一步光纤陀螺的体积、重量、成本的方面有着一定的重要指导意义。
10.另外,根据本发明的实施例提供的技术方案还可以具有如下附加技术特征:
11.上述任一技术方案中,所述s2中计算到达光电探测器信号的直流分量和峰值的方法如下:
[0012][0013]
其中,n1是在t1、t3时序时间内对应的采样点数、n2是在t2时序时间内对应的采样点数、s
dc1
、s
dc2
、s
peak
分别为t1、t3、t2时序时间内的采样积分值、分别为相邻两个τ周期内的直流分量的平均值、为信号直流分量的平均值、为相邻两个τ周期之间的直流分量峰值的平均值、i
peak
(n)为探测器的脉冲尖峰采样值、i
dc1
(n)和i
dc2
(n)分别为t1和t3时序时间内探测器的直流分量采样值、其中τ为光纤陀螺的渡越时间,即光在光纤环中传播一周的时间。
[0014]
在该技术方案中,为了采集和只需要在原有光纤陀螺的检测方案中增
加适当的ad采集时序,此处假设,t1对应的时序时间内,是对直流分量在正调制周期对应值的采样;t2对应的时序时间内,是对峰值的采样;t3对应的时序时间内,是对直流分量在负调制周期对应值的采样。
[0015]
上述任一技术方案中,所述s3中计算信号光功率和参考光功率的方法如下:
[0016][0017]
其中,为到达光电探测器的无调制下的最大信号光功率平均值、为到达光电探测器的有调制下的信号光功率平均值、为参考光功率平均值、为调制深度。
[0018]
在该技术方案中,在基于强度叠加型的光纤陀螺光源相对强度噪声对消方案中,结合光纤陀螺的信号特性与检测原理,到达探测器的总信号峰值、直流偏置量、信号光功率和参考光功率之间均值的关系有:
[0019][0020]
并且,在光纤陀螺检测闭环稳定的前提下,到达探测器的信号直流偏置量等于信号光与参考光强度之和,且有:
[0021][0022]
式中,分别为到达探测器的相邻两个τ周期内的直流光信号的平均值。由此,可推算出实际到达探测器的无调制下的最大信号光功率信号光功率平均值有调制下的信号光功率平均值以及参考光功率平均值
[0023]
上述任一技术方案中,所述比值的数值计算公式具体为:
[0024][0025]
其中,α1为所述参考光功率和所述信号光功率的强度比值。
[0026]
在该技术方案中,通过对强度比α1的计算和判定,并且通过改变调制深度,使得强度比始终保持在1,保证了光纤陀螺光源相对强度噪声自适应抑制的最佳效果。
[0027]
本发明与现有技术相比所具有的有益效果:
[0028]
在不引入任何器件的基础上,实现对信号光功率与参考光功率的动态监测;
[0029]
以最简形式,实现对光源相对强度噪声的自适应抑制功能,有助于推进光纤陀螺在降低功耗、体积、成本等方面的进一步发展
[0030]
根据本发明的实施例的附加方面和优点将在下面的描述部分中变得明显,或通过根据本发明的实施例的实践了解到。
附图说明
[0031]
附图仅用于示出具体实施例的目的,而并不认为是对本发明的限制。
[0032]
图1为基于强度叠加型的光源相对强度噪声对消方案典型原理图;
[0033]
图2为传统光纤陀螺光源相对强度噪声自适应抑制装置原理示意图;
[0034]
图3为本发明的光纤陀螺调制解调原理示意图;
[0035]
图4为本发明的基于光源相对强度噪声抑制方案下的探测器信号与采集时序示意图;
[0036]
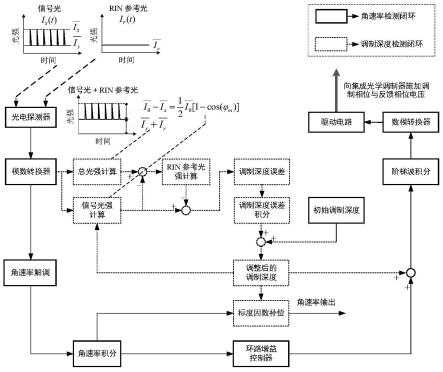
图5为本发明的光纤陀螺光源相对强度噪声自适应抑制装置的新型实现原理框图。
具体实施方式
[0037]
为了可以更清楚地理解本发明的上述目的、特征和优点,下面结合附图和具体实施方式对本发明进行进一步的详细描述。需要说明的是,在不冲突的情况下,本技术的实施例及实施例中的特征可以相互组合。
[0038]
在下面的描述中阐述了很多具体细节以便于充分理解本发明,但是,本发明还可以采用其他不同于在此描述的其他方式来实施,因此,本发明的保护范围并不受下面公开的具体实施例的限制。
[0039]
实施例1
[0040]
本发明第一方面的实施例,如图1-5所示,提供基于一种光纤陀螺光源相对强度噪声自适应抑制实现方法。其中,该方法包括:
[0041]
图3为光纤陀螺的典型调制解调原理示意图,结合图1所示的光路结构,由于到达光电探测器的参考光不受到调制,因此其在光电探测器处体现为直流分量,因此到达光电探测器的总光强可以表示为:
[0042][0043]
其中,为无调制下到达光电探测器的最大信号光功率平均值,为到达光电探测器的参考光功率平均值,为角速率对应的相位差,为反馈相位差,为调制方波相位差,为调制深度。
[0044]
根据光纤陀螺的调制解调原理,到达光电探测器的相邻两个τ周期内的光强可以表示为:
[0045][0046]
那么没有调制下达到光电探测器的最大光功率,即信号峰值角速率的解调值为相邻两个周期内的信号之差为:
[0047][0048]
可见参考光并未影响角速率的解调值,相邻两个周期的信号之和为:
[0049][0050]
而在光纤陀螺的全数字闭环检测过程中,当闭环趋于稳定时,反馈相位差与角速率对应的相位差大小相同、符号相反,因此相邻两个周期的信号之和可以表示为:
[0051][0052]
且其平均值为调制后的信号光功率与参考光功率之和,即为到达光电探测器的光功率的直流偏量平均值
[0053][0054]
根据上述分析可知,基于图1所示的光路结构下,施加调制后,到达光电探测器的信号光与参考光合并后的光强峰值、直流偏量分别为:
[0055][0056]
因此,结合已知变量调制深度与公式(7)、公式(8),即可推算出实际到达光电探测器的无调制下的最大信号光功率信号光功率均值有调制下的信号光功率均值以及参考光功率均值分别为:
[0057][0058]
在如图1所示的基于光源相对强度噪声对消光路方案中,到达光电探测器的实际信号光功率与参考光功率的强度比可以表示为:
[0059][0060]
因此,只要能够采集到达光电探测器总信号的峰值与直流分量即可获得相应的信号光功率参考光功率与其之间的强度比α1。
[0061]
为了采集和只需要在原有光纤陀螺的检测方案中增加适当的ad采集时序,如图4所示,t1对应的时序时间内,是对直流分量在正调制周期对应值i1的采样;t2对应的时序时间内,是对峰值的采样;t3对应的时序时间内,是对直流分量在负调制周期对应值i1的采样;对应的采样值可以表示为:
[0062][0063]
其中,n1是在t1、t3时序时间内对应的采样点数、n2是在t2时序时间内对应的采样点数、s
dc1
、s
dc2
、s
peak
分别为t1、t3、t2时序时间内的采样积分值、分别为相邻两个τ周期内的直流分量的平均值、为信号直流分量的平均值、为相邻两个τ周期之间的直流分量峰值的平均值、i
peak
(n)为探测器的脉冲尖峰采样值、i
dc1
(n)和i
dc2
(n)分别为t1和t3时序时间内探测器的直流分量采样值、其中τ为光纤陀螺的渡越时间,即光在光纤环中传播一周的时间。
[0064]
因此,只要通过设置合适的模数转换器的采样频率,配合相应的时序以及采集周期,即可通过对应采样得到的数字量计算进而进一步计算得到与α1,以此为监测基准,进行调制深度的调整,最终实现光源相对强度噪声的自适应抑制,其整体抑制方案示意图如图5所示。
[0065]
对比例1
[0066]
如图1所示的光源相对强度噪声对消光路方案能够在不破坏光纤陀螺最小互易性结构的基础上,利用同光谱且偏振态垂直的两束光叠加来达到抑制特点频率点下的相对强度噪声对消的目的,根据研究表明,两束光谱相同且偏振态相互垂直的光在叠加后的光源
相对强度噪声功率谱密度与原信号光中光源相对强度噪声功率谱密度之比为
[0067][0068]
式中,rind(v)、rin(v)分别代表两束光叠加后与叠加前的光源相对强度噪声功率谱密度,α1为当前时刻到达光电探测器的实际信号光功率与参考光功率的强度比,t1为信号光与参考光之间的时延,v为频率。在该方案下,当到达光电探测器的信号光与参考光强度一致,即α1=1时,在频率v=1/(2t1)处,理论上能够将光源相对强度噪声消除。而信号光与参考光的时延恰好为τ+te(除光纤环外的时延),因此只要恰当的增加参考光路中的光纤长度,令te=0,即t1=τ时,就能够在频率v=1/(2τ)处,也就是光纤陀螺的角速率解调频率下有效抑制光源相对强度噪声,增大光纤陀螺的检测信噪比,提高检测精度,因此保持到达光电探测器的信号光与参考光强度保持一致是实现抑制光源相对强度噪声的关键点。
[0069]
对比例2
[0070]
如图2为传统光纤陀螺光源相对强度噪声自适应抑制装置的典型原理示意图,其在图1的基础上增加了额外的分束比为na:nb的保偏耦合器与探测器b。探测器a用于接收信号光路与参考光路合并之后的光信号,探测器b用于接收参考光路分支的光信号,通过适当的计算给与合适的分束比,该方案不仅能够实现对光源相对强度噪声的有效抑制,而且可以根据各耦合器的分光比例以及探测器a、探测器b的接收光强,分别计算出到达探测器a的信号光功率与参考光功率,进而推算出当前状态下的强度比是否为1,再通过对调制深度的调整,始终保持到达探测器a的信号与参考光的强度比为1,实现对光源相对强度噪声的自适应最佳调节。
[0071]
在本发明的描述中,需要理解的是,术语“纵向”、“横向”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
[0072]
以上所述的实施例仅是对本发明的优选方式进行描述,并非对本发明的范围进行限定,在不脱离本发明设计精神的前提下,本领域普通技术人员对本发明的技术方案做出的各种变形和改进,均应落入本发明权利要求书确定的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1