复杂地下空间的岩体深部变形非接触自动监测方法与流程
1.本发明公开了一种复杂地下空间的岩体深部变形非接触自动监测方法,属于岩土工程技术领域。
背景技术:
2.现有技术中对具有复杂空腔(如平硐、巷道等)的岩体内部进行变形监测时,其主要采用的方法包括光学测量方法(如交汇测量、导线测量、精密水准测量等)和电测传感器测量方法(如杆式位移计、钢丝水平位移计、静力水准等)。上述方法在地下空腔或通道形状复杂、条件恶劣时,其测量难度大、准确性较低,且其只能实现局部相对的变形监测,无法获得基于外部变形基准点的绝对位移,从而难以建立岩体表部变形和深部变形之间的联系,给岩体变形机理分析和变形性态分析带来了很大困难。
技术实现要素:
3.本技术的目的在于,提供一种复杂地下空间的岩体深部变形非接触自动监测方法,以解决现有技术中的变形监测方法存在的难以建立岩体表部变形和深部变形之间的联系,导致岩体变形分析困难的技术问题。
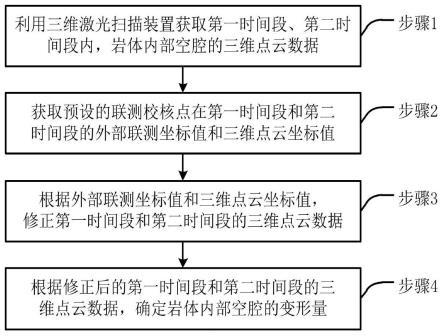
4.本发明提供了一种复杂地下空间的岩体深部变形非接触自动监测方法,包括:
5.利用三维激光扫描装置获取第一时间段、第二时间段内,岩体内部空腔的三维点云数据;
6.获取预设的联测校核点在所述第一时间段和所述第二时间段的外部联测坐标值和三维点云坐标值;
7.根据所述外部联测坐标值和三维点云坐标值,修正所述第一时间段和所述第二时间段的三维点云数据;
8.根据修正后的所述第一时间段和所述第二时间段的三维点云数据,确定岩体内部空腔的变形量。
9.优选地,根据所述外部联测坐标值和三维点云坐标值,修正所述第一时间段和所述第二时间段的三维点云数据,具体包括:
10.根据所述外部联测坐标值和三维点云坐标值,确定所述联测校核点的修正量;
11.根据所述联测校核点的修正量,修正所述第一时间段和所述第二时间段的三维点云数据。
12.优选地,所述外部联测校核点包括一个校核基点和一个或多个联测控制标靶;
13.所述校核基点和所述联测控制标靶不共线且不共面。
14.优选地,根据修正后的所述第一时间段和所述第二时间段的三维点云数据,确定岩体内部空腔的变形量,具体包括:
15.计算修正后的所述第一时间段的三维点云数据和所述第二时间段的三维点云数据之差,所得差值为所述岩体内部空腔的变形量。
16.优选地,根据修正后的所述第一时间段和所述第二时间段的三维点云数据,确定岩体内部空腔的变形量之后,还包括:
17.获取岩体内部空腔内预设点云靶标位置处的变形量。
18.优选地,所述三维激光扫描装置为基于slam的三维激光扫描装置。
19.优选地,利用三维激光扫描装置获取第一时间段、第二时间段内,岩体内部空腔的三维点云数据,具体包括:
20.沿所述岩体内部空腔的延伸方向架设固定导轨,所述导轨位于所述空腔或通道内;
21.将所述三维激光扫描装置设置在驱动装置上;
22.在第一时间段及第二时间段内,所述驱动装置均带动所述三维激光扫描装置沿所述导轨往复一次,得到所述第一时间段、第二时间段内,岩体内部空腔的三维点云数据。
23.优选地,利用三维激光扫描装置获取第一时间段、第二时间段内,岩体内部空腔的三维点云数据,具体包括:
24.将所述三维激光扫描装置设置在无人机上;
25.在第一时间段及第二时间段内,所述无人机均沿所述岩体内部空腔的延伸方向往复一次,得到所述第一时间段、第二时间段内,岩体内部空腔的三维点云数据。
26.优选地,所述无人机外部设置有防撞保护架。
27.优选地,所述联测校核点设置于所述空腔的进口处。
28.本发明的复杂地下空间的岩体深部变形非接触自动监测方法,相较于现有技术,具有如下有益效果:
29.本发明复杂地下空间的岩体深部变形非接触自动监测方法,结合联测校核点和外部联测方法将岩体深部的相对变形转换为基于外部变形基准点的绝对变形,从而建立岩体表部变形和深部变形之间的联系,提高岩体变形机理分析和变形性态分析的便捷性。
30.本发明主要采用的技术包括轨道移动或防撞无人机移动测量技术、免控制点的同步定位与测量技术(slam算法)、基于特定点点云位移分析的技术。通过将这三种技术的结合,可实现具有空腔或通道的岩土工程深部岩体变形、边坡工程内部岩体变形、复杂构筑物内部变形的快速非接触自动化监测。本发明能够实现岩体深部变形的非接触式和自动化监测,能够显著提高监测效率和降低监测安全风险,尤其适用于复杂、恶劣环境条件下工作和应急抢险工作,对推动工程安全监测技术发展有重要的意义。
附图说明
31.图1为本发明实施例中复杂地下空间的岩体深部变形非接触自动监测方法的概要流程示意图;
32.图2为本发明实施例中复杂地下空间的岩体深部变形非接触自动监测方法的详细流程图;
33.图3为本发明实施例中使用轨道移动扫描监测时,岩体内部空腔的结构示意图;
34.图4为图3中的a-a剖面图;
35.图5为本发明实施例中使用无人机移动扫描监测时,岩体内部空腔的结构示意图;
36.图6为图5中的b-b剖面图;
37.图7为本发明实施例中联测校核点的设置位置示意图。
38.图中1为空腔进口;2为导轨;3为空腔;4为空腔端部;5为移动设备连接架;6为步进电机;7为步进滑轮;8为导轨锚固段;9为三维激光扫描装置;10为导轨连接架;11为空腔边壁;12为无人机行进轨迹方向;13为无人机;14为防撞保护架;15为联测校核点;16为点云靶标。
具体实施方式
39.以下描述中,为了说明而不是为了限定,提出了诸如特定系统结构、技术之类的具体细节,以便透彻理解本发明实施例。然而,本领域的技术人员应当清楚,在没有这些具体细节的其它实施例中也可以实现本发明。在其它情况中,省略对众所周知的系统、装置、电路以及方法的详细说明,以免不必要的细节妨碍本发明的描述。
40.如图1和图2所示,本发明实施例的复杂地下空间的岩体深部变形非接触自动监测方法,包括:
41.步骤1、利用三维激光扫描装置获取第一时间段、第二时间段内,岩体内部空腔的三维点云数据。本实施例中的空腔也可为通道。
42.本实施例中,在利用三维激光扫描装置获取三维点云数据之前,首先需要根据空腔或通道的分布情况、结构情况及安全性,结合监测目的,分析判断最佳的移动扫描方式,其中移动扫描方式包括轨道移动扫描方式和无人机移动扫描方式。
43.(1)如果需要长期的周期性监测,首先应选择轨道移动扫描方式进行监测,在通道顶部布设插筋连接导轨,通过带有蓄电池和步进马达的驱动装置载着三维激光扫描装置进行移动扫描测量。
44.在使用轨道移动扫描监测时,岩体内部空腔或通道的结构如图3及图4所示。
45.则利用轨道移动扫描监测获取岩体内部空腔或通道的三维点云数据的具体步骤为:
46.沿岩体内部空腔或通道的延伸方向架设固定导轨2,导轨2位于空腔3或通道内;在图4中,导轨2是通过导轨连接架10设置于空腔或通道内的,导轨连接架10与空腔边壁11或者通道边壁的连接部分为导轨锚固段8;
47.将三维激光扫描装置9设置在驱动装置上;本实施例中的驱动装置为电机,优选为步进电机6,则三维激光扫描装置9通过移动设备连接架5与步进电机6连接;步进电机与设置在导轨上的步进滑轮7配合。
48.在第一时间段及第二时间段内,驱动装置均带动三维激光扫描装置沿导轨往复一次(沿导轨行进至空腔端部4后再返回空腔进口1处),得到第一时间段、第二时间段内,岩体内部空腔或通道的三维点云数据。本实施例中的三维激光扫描装置为基于slam算法的三维激光扫描装置。
49.slam算法:simultaneous localizationand mapping的简称,设备在未知环境中从一个未知位置开始移动,在移动过程中根据位置估计和地图进行自身定位,同时在自身定位的基础上构建增量式地图,实现机器人的自主定位和导航。
50.利用基于slam算法的三维激光扫描装置即可获得岩体内部空腔或者通道的具有相对坐标的三维点云数据。
51.(2)如果仅仅进行短期内的应急监测,且空间狭小或过于复杂,不能或不宜采用轨道移动扫描进行监测时,可采用无人机载三维激光扫描仪进行移动扫描测量。
52.在使用无人机移动扫描监测时,岩体内部空腔或通道的结构如图5及图6所示。
53.则利用无人机移动扫描监测获取岩体内部空腔或通道的三维点云数据的具体步骤为:
54.将三维激光扫描装置9设置在无人机13上;
55.在第一时间段及第二时间段内,无人机均沿岩体内部空腔或通道的延伸方向(无人机行进轨迹方向12)往复一次,得到第一时间段、第二时间段内,岩体内部空腔或通道的三维点云数据。
56.为保证无人机的安全稳定运行,本实施例在无人机外部设置有防撞保护架14。
57.本实施例中的三维激光扫描装置同样为基于slam算法的三维激光扫描装置。
58.slam算法:simultaneous localizationand mapping的简称,设备在未知环境中从一个未知位置开始移动,在移动过程中根据位置估计和地图进行自身定位,同时在自身定位的基础上构建增量式地图,实现机器人的自主定位和导航。
59.利用基于slam算法的三维激光扫描装置即可获得岩体内部空腔或者通道的具有相对坐标的三维点云数据。
60.步骤2、获取预设的联测校核点15在第一时间段和第二时间段的外部联测坐标值和三维点云坐标值。
61.本实施例中设置联测校核点的目的是将岩体深部的相对变形转换为基于外部变形基准点的绝对变形,从而建立岩体表部变形和深部变形之间的联系,提高岩体变形机理分析和变形性态分析的便捷性。
62.本实施例中预设的联测校核点设置在空腔进口1或通道进口处,如图7所示。
63.其中联测校核点可以为一组或者多组,每组包括一个校核基点和一个或多个联测控制标靶;且校核基点和联测控制标靶不共线且不共面。该种设置可以保证所获取的联测校核点的修正量的全面性及准确性,进而保证将具有相对坐标的三维点云数据转换到具有绝对坐标的三维点云数据的准确性。
64.进一步地,本实施例中所使用的外部联测方法为根据外部已知工作基点利用交会或极坐标法对联测校核点进行测量,获取联测校核点的与外部坐标系一致的坐标。
65.步骤3、根据外部联测坐标值和三维点云坐标值,修正第一时间段和第二时间段的三维点云数据,具体包括:
66.步骤31、根据外部联测坐标值和三维点云坐标值,确定联测校核点的修正量。
67.示例性地,当联测校核点包括一个校核基点和两个联测控制标靶时,记联测校核点为tpj(j=1,2,3),设定tp1为校核基点,tp2和tp3为两个联测控制标靶。则根据外部联测坐标值和三维点云坐标值,确定联测校核点的修正量具体为:
68.根据公式(1)确定联测校核点的修正量:
69.70.式中,cxi、cyi和czi分别为第i时间段的x方向(正北方向)、y方向(正东方向)和z方向(高程)的修正量;dxji、dyji和dzji分别为联测校核点tpj(j=1,2,3)在第i时间段x方向(正北方向)、y方向(正东方向)和z方向(高程)的外部联测坐标值;dxji、dyji和dzji分别为联测校核点tpj(j=1,2,3)处三维点云数据在第i时间段的x方向(正北方向)、y方向(正东方向)和z方向(高程)的坐标值。
71.步骤32、根据联测校核点的修正量,修正第一时间段和第二时间段的三维点云数据。
72.假设第一时间段内任一点云p的坐标为(dxpi,dypi,dzpi),则修正后的点云p的绝对坐标如公式(2):
[0073][0074]
式中,dxpi、dypi和dzpi分别为修正后的点云p的x方向(正北方向)、y方向(正东方向)和z方向(高程)的坐标值。利用公式(2)对第一时间段内的岩体内部空腔或通道的所有三维点云数据进行修正即可得到修正后的第一时间段的三维点云数据。同理可得修正后的第二时间段的三维点云数据。
[0075]
步骤4、根据修正后的第一时间段和第二时间段的三维点云数据,确定岩体内部空腔或通道的变形量,具体包括:
[0076]
计算修正后的第一时间段的三维点云数据和第二时间段的三维点云数据之差,所得差值为岩体内部空腔或通道的变形量,如公式(3)所示:
[0077][0078]
式中,δx
p
,δy
p
和δz
p
为岩体内部空腔或通道在点云p处的变形量,dxpi、dypi和dzpi分别为第i时间段的修正后的点云p的x方向(正北方向)、y方向(正东方向)和z方向(高程)的坐标值,dxpm、dypm和dzpm分别为第m时间段的修正后的点云p的x方向(正北方向)、y方向(正东方向)和z方向(高程)的坐标值。本实施例中第m时间段可以为初始时间段,第i时间段可以为监测时间段。
[0079]
本发明实施例,根据空腔或通道条件和分析需要,可在关键部位布设点云靶标,作为对比分析的特征点。具体为:在根据修正后的第一时间段和第二时间段的三维点云数据,确定岩体内部空腔或通道的变形量之后,还包括:获取岩体内部空腔或通道内预设点云靶标16位置处的变形量。从而对重点的点云靶标处进行对比分析。
[0080]
本发明提出了一种复杂地下空间的岩体深部变形非接触自动监测新方法,其可将具有相对坐标的三维点云数据转换至绝对坐标系内,从而建立岩体表部变形和深部变形之间的联系,提高岩体变形机理分析和变形性态分析的便捷性。
[0081]
本发明主要采用的技术包括轨道移动或防撞无人机移动测量技术、免控制点的同步定位与测量技术(slam算法)、基于特定点点云位移分析的技术。通过将这三种技术的结
合,可实现具有空腔或通道的岩土工程深部岩体变形、边坡工程内部岩体变形、复杂构筑物内部变形的快速非接触自动化监测。本发明能够实现岩体深部变形的非接触式和自动化监测,能够显著提高监测效率和降低监测安全风险,尤其适用于复杂、恶劣环境条件下工作和应急抢险工作,对推动工程安全监测技术发展有重要的意义。
[0082]
以上所述,仅是本技术的几个实施例,并非对本技术做任何形式的限制,虽然本技术以较佳实施例揭示如上,然而并非用以限制本技术,任何熟悉本专业的技术人员,在不脱离本技术技术方案的范围内,利用上述揭示的技术内容做出些许的变动或修饰均等同于等效实施案例,均属于技术方案范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1