激光跟踪仪俯仰轴和方位轴的相交度误差检测方法及系统
1.本发明涉及空间坐标测量仪器技术领域,尤其涉及一种激光跟踪仪俯仰轴和方位轴的相交度误差检测方法及系统。
背景技术:
2.激光跟踪仪作为一种空间坐标测量仪器,在航空航天、船舶制造、轨道交通领域等具有广泛的应用。
3.在激光跟踪仪的几何结构中,俯仰轴和方位轴是激光跟踪仪的关键轴系,方位轴可以承载反射镜在水平面上进行旋转,俯仰轴可以令反射镜在竖平面上进行旋转,两者共同作用使得激光跟踪仪在测量空间内可以进行三维旋转。激光跟踪仪的方位轴和俯仰轴在理想情况下应该相交,但由于机械结构存在加工和装调误差,导致俯仰轴与方位轴不相交,即俯仰轴和方位轴在空间上存在一定距离,该距离值称为俯仰轴和方位轴的相交度误差,该误差使激光跟踪仪光束偏离理想位置,从而产生测量误差。因此需要研究高精度的检测手段,检测出激光跟踪仪俯仰轴和方位轴的相交度误差,以利于对激光跟踪仪轴系的精确调整及误差修正。
技术实现要素:
4.针对上述问题,本发明提出一种激光跟踪仪俯仰轴和方位轴的相交度误差检测方法及系统,利用简单的操作流程高精度检测激光跟踪仪俯仰轴和方位轴的相交度误差,可以满足高精度检测的需求。
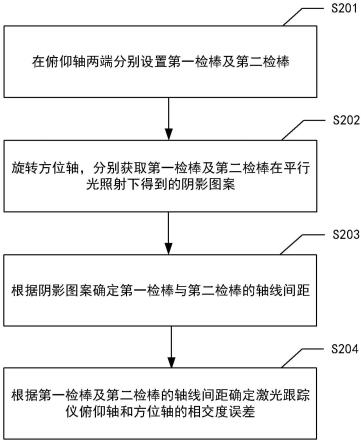
5.作为本发明的一个方面,本发明提出的激光跟踪仪俯仰轴和方位轴的相交度误差检测方法包括:在俯仰轴两端分别设置第一检棒及第二检棒,其中,第一检棒及第二检棒为具有母线及轴的旋转体,母线为直线,轴与俯仰轴的中心轴线重合;旋转方位轴,分别获取第一检棒及第二检棒在平行光照射下得到的阴影图案,其中,平行光的照射方向与方位轴的轴线平行,阴影图案呈现在第一接收平面上;根据阴影图案确定第一检棒与第二检棒的轴线间距;根据第一检棒及第二检棒的轴线间距确定激光跟踪仪俯仰轴和方位轴的相交度误差。
6.进一步地,本发明的激光跟踪仪俯仰轴和方位轴的相交度误差检测方法,旋转方位轴,分别获取第一检棒及第二检棒在平行光照射下得到的阴影图案包括:在第一检棒的一侧投射平行光,在第一检棒另一侧的第一接收平面上获取第一阴影图案;将方位轴旋转180
°
,平行光从第二检棒的一侧投射,在第二检棒另一侧的第一接收平面上获取第二阴影图案。
7.进一步地,本发明的激光跟踪仪俯仰轴和方位轴的相交度误差检测方法,根据阴影图案确定第一检棒与第二检棒的轴线间距包括:以第一检棒的轴在第一接收平面上的投影直线为第一轴线,以第二检棒的轴在第一接收平面上的投影直线为第二轴线,根据阴影图案确定第一轴线及第二轴线在第一接收平面上的位置;根据第一轴线及第二轴线在第一
接收平面上的位置确定第一轴线与第二轴线的线间距;根据第一轴线与第二轴线的线间距确定第一检棒与第二检棒的轴线间距。
8.进一步地,本发明的激光跟踪仪俯仰轴和方位轴的相交度误差检测方法,根据阴影图案确定第一轴线及第二轴线在第一接收平面上的位置包括:在第一接收平面上建立坐标系;第一检棒及第二检棒在第一接收平面上的阴影图案分别为第一阴影图案与第二阴影图案,第一阴影图案包括第一侧线及第二侧线,根据第一侧线及第二侧线确定第一轴线在坐标系内的第一轴线方程;第二阴影图案包括第三侧线及第四侧线,根据第三侧线及第四侧线确定第二轴线在坐标系内的第二轴线方程。
9.进一步地,本发明的激光跟踪仪俯仰轴和方位轴的相交度误差检测方法,其特征在于,根据第一侧线及第二侧线确定第一轴线在坐标系内的第一轴线方程包括:第一检棒为圆柱体,第一侧线平行于第二侧线;在第一接收平面上建立直角坐标系;分别确定第一侧线及第二侧线在所述直角坐标系的方程,分别为:y=ax+b1,y=ax+b2;根据第一侧线的方程及第二侧线的方程确定第一轴线方程为:y=ax+(b1+b2)/2,其中,a为第一侧线或第二侧线的斜率,b1和b2分别为第一侧线及第二侧线在直角坐标系纵轴上的截距,(x,y)为第一侧线或第二侧线或第一轴线上的点在直角坐标中的坐标。
10.进一步地,本发明的激光跟踪仪俯仰轴和方位轴的相交度误差检测方法,根据第一轴线与第二轴线的线间距确定第一检棒与第二检棒的轴线间距包括:第二检棒为圆柱体,第三侧线平行于第四侧线;分别确定第三侧线及第四侧线在直角坐标系的方程,分别为:y=ax+b3,y=ax+b4;根据第三侧线的方程及第四侧线的方程确定第二轴线方程为:y=ax+(b3+b4)/2;根据第一轴线方程和第二轴线方程确定第一轴线与第二轴线的线间距为:
[0011][0012]
所述第一检棒与所述第二检棒的轴线间距为:
[0013][0014]
其中,a为第三侧线或所述第四侧线的斜率,b3和b4分别为第三侧线与第四侧线在直角坐标系纵轴上的截距,(x,y)为第三侧线或第四侧线或第二轴线上的点在直角坐标中的坐标。
[0015]
进一步地,本发明的激光跟踪仪俯仰轴和方位轴的相交度误差检测方法,包括:在俯仰轴两端分别设置转接件;在转接件外侧分别设置第一检棒及第二检棒;调节转接件以调整第一检棒及第二检棒的空间位置,使得第一检棒及第二检棒的轴与俯仰轴的中心轴线重合。
[0016]
本发明的另一方面提出一种激光跟踪仪俯仰轴和方位轴的相交度误差检测系统,包括:第一检棒及第二检棒,分别设置于俯仰轴两端,用于根据第一检棒及第二检棒的轴线间距确定激光跟踪仪俯仰轴和方位轴的相交度误差,其中,第一检棒及第二检棒为具有母线及轴的旋转体,母线为直线,轴与俯仰轴的中心轴线重合;光源,用于发射平行光,以使第一检棒及第二检棒在平行光照射下得到阴影图案,其中,平行光的照射方向与方位轴的轴线平行;接收器,包括第一接收平面,第一接收平面用于接收并呈现阴影图案。
[0017]
进一步地,本发明的激光跟踪仪俯仰轴和方位轴的相交度误差检测系统,包括:转
接件,设置于第一检棒与俯仰轴之间或第二检棒与俯仰轴之间,用于调整第一检棒及第二检棒的空间位置,使得第一检棒及第二检棒的轴与俯仰轴的中心轴线重合。
[0018]
进一步地,本发明的激光跟踪仪俯仰轴和方位轴的相交度误差检测系统,其特征在于,包括:支撑架,支撑架用于连接并固定光源及接收器,以使光源及接收器相对于激光跟踪仪位置固定。
[0019]
本发明具有如下有益效果:
[0020]
(1)通过同轴检棒和投影图像测量计算可以对激光跟踪仪的俯仰轴和方位轴相交度进行检测,该方法测量流程简单,测量精度高,可以满足激光跟踪仪轴系相交度误差高精度检测的需求;
[0021]
(2)本发明中提出的俯仰轴和方位轴相交度误差检测方法适用于绝大部分二维转台的轴系相交度误差检测的精度,可满足精密装配和检测中二维转台相交度误差检测的需求。
附图说明
[0022]
图1为激光跟踪仪的结构示意图;
[0023]
图2为本发明激光跟踪仪俯仰轴和方位轴的相交度误差检测方法流程图;
[0024]
图3为本发明根据阴影图案确定第一轴线及第二轴线在第一接收平面上的位置流程图;
[0025]
图4为本发明一些实施例的激光跟踪仪俯仰轴和方位轴的相交度误差检测系统使用示意图;
[0026]
图5为本发明另一些实施例的激光跟踪仪俯仰轴和方位轴的相交度误差检测系统使用示意图。
[0027]
图中:
[0028]
1.俯仰轴;2.方位轴;3.反射镜;4.第一检棒;5.第二检棒;6.光源;7.接收器;8.第一接收平面;9.转接件;10.支撑架。
具体实施方式
[0029]
如图1为激光跟踪仪的结构示意图。由图1可知激光跟踪仪包括:俯仰轴1、方位轴2、反射镜3,方位轴2可以承载反射镜3在水平面上进行旋转,俯仰轴1可以令反射镜3在竖平面上进行旋转,两者共同作用使得激光跟踪仪在测量空间内可以进行三维旋转。方位轴2和俯仰轴1在理想情况下应该相交,但由于机械结构存在加工和装调误差,导致俯仰轴1与方位轴2不相交,即俯仰轴1和方位轴2在空间上存在一定距离。
[0030]
为使本发明的目的、技术方案和优点更加清楚明白,以下结合具体实施例,并参照附图,对本发明进一步详细说明。
[0031]
参见图2,本发明提出的激光跟踪仪俯仰轴和方位轴的相交度误差检测方法包括如下步骤:
[0032]
s201,在俯仰轴两端分别设置第一检棒及第二检棒,其中,第一检棒及第二检棒为具有母线及轴的旋转体,母线为直线,轴与俯仰轴的中心轴线重合。
[0033]
激光跟踪仪的俯仰轴和方位轴均为圆柱体形状,当旋转方位轴或俯仰轴时,均是
绕着其圆柱体形状的中心轴线旋转。当俯仰轴与方位轴不相交时,二者的中心轴线并不重合,当方位轴绕其中心轴线旋转180
°
时,俯仰轴的中心轴线在水平面上会有一段位移,这段位移即为俯仰轴和方位轴的相交度误差的2倍。
[0034]
为了确定俯仰轴的中心轴线位置,本发明在俯仰轴两端分别设置第一检棒及第二检棒,且第一检棒及第二检棒为具有母线及轴的旋转体,当旋转体的轴与俯仰轴的中心轴线重合时,只要确定了旋转体轴的位置即可确定俯仰轴的中心轴线位置。
[0035]
根据本发明的一些实施例,本发明第一检棒及第二检棒所用的旋转体可以是圆柱体形状、圆锥体形状,进而可以利用旋转体轴的位置确定俯仰轴的中心轴线位置。
[0036]
根据本发明的一些实施例,本发明的第一检棒和第二检棒可以使用不同形状或大小的旋转体形状,只要可以计算出第一检棒及第二检棒的轴位置即可。
[0037]
根据本发明的一些实施例,本发明采用如下方法设置第一检棒及第二检棒:在俯仰轴两端分别设置转接件;在转接件外侧分别设置第一检棒及第二检棒;调节转接件以调整第一检棒及第二检棒的空间位置,使得第一检棒及第二检棒的轴与俯仰轴的中心轴线重合。
[0038]
采用转接件将第一检棒及第二检棒与俯仰轴连接,通过调整转接件可以对第一检棒及第二检棒的空间位置进行调整。确保第一检棒及第二检棒的轴与俯仰轴的中心轴线重合,从而可以直接采用第一检棒及第二检棒的轴的空间位置反映俯仰轴的中心轴线位置。
[0039]
s202,旋转方位轴,分别获取第一检棒及第二检棒在平行光照射下得到的阴影图案,其中,平行光的照射方向与方位轴的轴线平行,阴影图案呈现在第一接收平面上。
[0040]
根据本发明的一些实施例,采用如下操作分别获取第一检棒及第二检棒在平行光照射下得到的阴影图案:在第一检棒的一侧投射平行光,在第一检棒另一侧的第一接收平面上获取第一阴影图案;将方位轴旋转180
°
,平行光从第二检棒的一侧投射,在第二检棒另一侧的第一接收平面上获取第二阴影图案。
[0041]
根据本发明的一些实施例,可以在激光跟踪仪的旁侧设置平行光,并且平行光的光照方向与方位轴的轴线平行。按照此时的光照方向,平行光会以垂直于俯仰轴中心轴线的方向照射。调整平行光的照射位置可以使得平行光从一侧照射到第一检棒上,在第一检棒的另一侧留下第一检棒的阴影图案。使用第一接收平面接收并呈现第一检棒的阴影图案,即得到第一阴影图案。
[0042]
将方位轴旋转180
°
,此时第二检棒旋转到第一检棒的位置,在该位置处,平行光从第二检棒的一侧照射,在另一侧留下第二检棒的阴影图案。使用第一接收平面接收并呈现第二检棒的阴影图案,即得到第二阴影图案。
[0043]
根据本发明的一些实施例,可以设置平行光及第一接收平面与激光跟踪仪的位置相对固定。当旋转方位轴前后,会分别在第一接收平面上接收并呈现第一阴影图案、第二阴影图案。通过比较第一阴影图案、第二阴影图案在第一接收平面上的位置即可确定第一阴影图案、第二阴影图案的相对位移。
[0044]
s203,根据阴影图案确定第一检棒与第二检棒的轴线间距。
[0045]
根据本发明的一些实施例,根据阴影图案确定第一检棒与第二检棒的轴线间距包括:以第一检棒的轴在第一接收平面上的投影直线为第一轴线,以第二检棒的轴在第一接收平面上的投影直线为第二轴线,根据阴影图案确定第一轴线及第二轴线在第一接收平面
上的位置;根据第一轴线及第二轴线在第一接收平面上的位置确定第一轴线与第二轴线的线间距;根据第一轴线与第二轴线的线间距确定第一检棒与第二检棒的轴线间距。
[0046]
根据本发明的一些实施例,当第一检棒或第二检棒使用圆柱体形状时,圆柱体在平面上的投影为矩形,则圆柱体的轴在平面上的投影为矩形的中位等分线,该中位等分线与投影矩阵其中两条对边的距离相等,因此可以根据投影矩形的两条对边位置,确定投影矩形的中位等分线位置。
[0047]
同时确定第一检棒与第二检棒投影矩形的中位等分线位置后即可确定二者之间的间距,这个间距即可反映第一检棒与第二检棒的轴线间距。
[0048]
更进一步地,本发明采用在第一接收平面上建立坐标系的方式来求得第一检棒与第二检棒的轴线间距。
[0049]
如图3,根据本发明的一些实施例,根据阴影图案确定第一轴线及第二轴线在第一接收平面上的位置包括:
[0050]
s301,在第一接收平面上建立坐标系。
[0051]
根据本发明的一些实施例,建立的坐标系为直角坐标系,在直角坐标系中可进行下面的位置确定及间距计算。但是在本发明的另一些实施例中,还可以建立如极坐标系等其他坐标系。只要能够反映阴影图案在第一接收平面上的位置,以及根据位置来计算得到第一检棒与第二检棒的轴线间距即可。
[0052]
s302,第一检棒及第二检棒在第一接收平面上的阴影图案分别为第一阴影图案与第二阴影图案,第一阴影图案包括第一侧线及第二侧线,根据第一侧线及第二侧线确定第一轴线在坐标系内的第一轴线方程;
[0053]
s303,第二阴影图案包括第三侧线及第四侧线,根据第三侧线及第四侧线确定第二轴线在坐标系内的第二轴线方程。
[0054]
在本发明的一些实施例中,上述步骤s302-s303例如可以是在直角坐标系中进行的位置确定及间距计算。第一阴影图案的第一侧线及第二侧线、第二阴影图案的第三侧线及第四侧线均与所选择的旋转体母线有关。本发明的实施例选用的旋转体母线为直线,因此第一侧线及第二侧线、第三侧线及第四侧线均为直线。因此通过第一侧线及第二侧线可以求得第一轴线在坐标系内的第一轴线方程,通过第三侧线及第四侧线可以求得第二轴线在坐标系内的第二轴线方程。
[0055]
当第一检棒或第二检棒选用不同形状的旋转体时,在第一接收平面上的第一阴影图案与第二阴影图案可以有不同形状。例如当第一检棒选用圆柱体形状时,第一阴影图案为矩形,第一检棒选用圆锥体形状时,第一阴影图案为等腰三角形。在第一接收平面上,通过矩形位置可以确定中位等分线位置,通过等腰三角形位置可以确定高线的位置。而中位等分线的位置或高线的位置即为第一轴线的位置,进而可以求出第一轴线在第一接收平面上的第一轴线方程。
[0056]
根据本发明的一些实施例,第一检棒与第二检棒均采用圆柱体形状。则第一侧线平行于第二侧线,第三侧线平行于第四侧线。
[0057]
在第一接收平面上建立直角坐标系;分别确定第一侧线及第二侧线在直角坐标系的方程,第一侧线的方程及第二侧线的方程分别为:y=ax+b1,y=ax+b2(两直线平行,所以斜率相等,均为a)。则确定第一轴线方程为:y=ax+(b1+b2)/2。分别确定第三侧线及第四侧
线在直角坐标系的方程分别为:y=ax+b3,y=ax+b4(两直线平行,因为第三侧线与第四侧线均与第一侧线和第二测线平行,所以斜率均为a)。则确定第二轴线方程为:y=ax+(b3+b4)/2。b1和b2分别为第一侧线及第二侧线在直角坐标系纵轴上的截距,b3和b4分别为第三侧线与第四侧线在直角坐标系纵轴上的截距,(x,y)为第一侧线或第二侧线或第一轴线或第三侧线或第四侧线或第二轴线上的点在直角坐标中的坐标。
[0058]
例如,可以以平行于第一侧线的直线为横轴建立直角坐标系,需要说明的是,直角坐标系的横纵轴可以与某一侧线平行或相交,具体方向可以根据实际应用场景确定,本公开不做限制。
[0059]
s204,根据第一检棒及第二检棒的轴线间距确定激光跟踪仪俯仰轴和方位轴的相交度误差。
[0060]
在上述步骤中已经求出了第一轴线方程为:y=ax+(b1+b2)/2,第二轴线方程为:y=ax+(b3+b4)/2,则第一轴线与第二轴线的线间距为:则第一检棒与第二检棒的轴线间距为:则激光跟踪仪俯仰轴和方位轴的相交度误差为
[0061]
本发明的另一方面,提出一种激光跟踪仪俯仰轴和方位轴的相交度误差检测系统。
[0062]
如图4为本发明一些实施例的激光跟踪仪俯仰轴和方位轴的相交度误差检测系统使用示意图。由图4可知该系统包括:
[0063]
第一检棒4及第二检棒5,用于根据第一检棒4及第二检棒5的轴线间距确定激光跟踪仪俯仰轴1和方位轴2的相交度误差;光源6,用于发射平行光,以使第一检棒及第二检棒在平行光照射下得到阴影图案;接收器7,包括第一接收平面8,第一接收平面8用于接收并呈现阴影图案。
[0064]
根据本发明的一些实施例,在使用该系统时,将第一检棒4及第二检棒5设置于俯仰轴1两端,并使旋转体形状的第一检棒4及第二检棒5的轴与俯仰轴1的中心轴线重合。
[0065]
根据本发明的另一些实施例,本发明的系统还包括转接件9,用于调整第一检棒4及第二检棒5的空间位置,使得第一检棒4及第二检棒5的轴与俯仰轴1的中心轴线重合。
[0066]
根据本发明的另一些实施例,在使用该系统时,在第一检棒4与俯仰轴1之间、第二检棒5与俯仰轴1之间均连接转接件9,通过调整转接件9可以使得第一检棒4及第二检棒5的轴与俯仰轴1的中心轴线重合。
[0067]
根据本发明的另一些实施例,本发明的系统还包括支撑架10,支撑架10用于连接并固定光源6及接收器7,以使光源6及接收器7相对于激光跟踪仪位置固定。
[0068]
根据本发明的另一些实施例,支撑架10可以设置于激光跟踪仪的一侧并固定,以使支撑架10上连接的光源6及接收器7相对于激光跟踪仪位置固定,且光源6发射的平行光可以经过第一检棒4或第二检棒5在第一接收平面8上留下阴影图案。
[0069]
如图5为本发明另一些实施例的激光跟踪仪俯仰轴和方位轴的相交度误差检测系统使用示意图。在该些实施例中,同时使用了转接件9及支撑架10。
[0070]
以上所述的具体实施例,对本发明的目的、技术方案和有益效果进行了进一步详细说明,所应理解的是,以上所述仅为本发明的具体实施例而已,并不用于限制本发明,凡
在本发明的精神和原则之内,所做的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1