设备定位方法、装置、设备及存储介质与流程
本技术涉及定位领域,尤其涉及设备定位方法、装置、设备及存储介质。
背景技术:
1、激光雷达,是以发射激光束探测目标的位置、速度等特征量的雷达系统,其一般由发射系统、接收系统、信号处理系统等组成,其中,发射系统用于向外发射光脉冲,接收系统用于接收外界目标反射回来的光脉冲,信号处理系统用于根据反射回来的光脉冲处理获得外界目标的有关信息,以此完成对外界目标的探测、跟踪和识别。
2、激光雷达在机器人导航、工程测量等领域都有较多的应用,其可以用于对机器人进行定位。在利用激光雷达对机器人进行定位的过程中,当机器人处于长走廊中时,由于激光与地图的匹配只能提供角度和一个方向上的约束,常常会导致机器人行走在长走廊上而不自知,进而引起机器人的定位产生较大的误差或定位失效。
技术实现思路
1、本技术提供设备定位方法、装置、设备及存储介质,以解决机器人处于长走廊环境带来的定位误差。
2、第一方面,提供一种设备定位方法,包括:
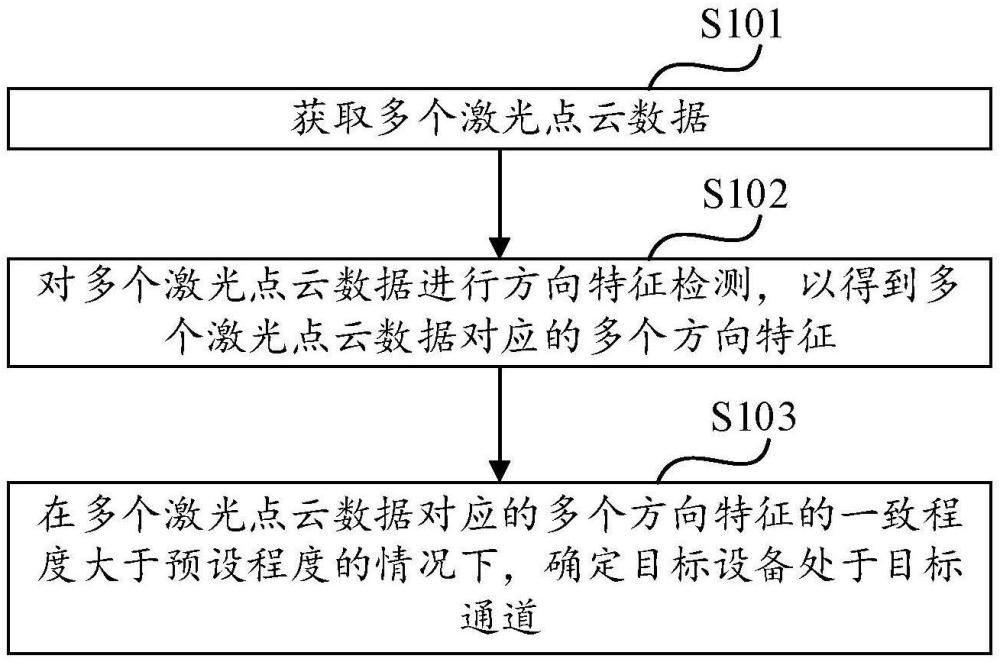
3、获取多个激光点云数据,所述多个激光点云数据为基于目标设备中设置的激光雷达获取到的;
4、对所述多个激光点云数据进行方向特征检测,以得到所述多个激光点云数据对应的多个方向特征;
5、在所述多个方向特征的一致程度大于预设程度的情况下,确定所述目标设备处于目标通道,其中,所述目标通道是指长度大于预设长度的通道。
6、在该技术方案中,在获取到多个激光点云数据后,通过对多个激光点云数据进行方向特征检测,得到多个激光点云数据对应的多个方向特征,并在多个激光点云数据的方向特征的一致程度大于预设程度的情况下,确定目标设备处于目标通道。目标通道的长度大于预设长度,目标设备处于目标通道可以理解为目标设备处于长走廊环境,通过对多个激光点云数据进行方向特征检测的方式,为激光点云数据赋予方向特征,再通过判断激光点云数据的方向特征的一致程度,可以实现对目标设备是否处于目标通道(如长走廊环境)的精准检测,进而实现对目标设备的精准定位。
7、结合第一方面,在一种可能的实现方式中,所述对所述多个激光点云数据进行方向特征检测,以得到所述多个激光点云数据对应的多个方向特征,包括:基于所述多个激光点云数据进行直线检测,以得到所述多个激光点云数据对应的至少一条直线,并根据所述至少一条直线确定斜率集合,其中,所述斜率集合包括多个斜率,一个斜率用于指示一个激光点云数据的方向特征。通过对激光点云进行直线检测,并利用斜率来指示激光点云数据的方向特征,方式简单,能够实现对激光点云数据的方向特征的快速检测。
8、结合第一方面,在一种可能的实现方式中,所述基于所述多个激光点云数据进行直线检测,以得到所述多个激光点云数据对应的至少一条直线,并根据所述至少一条直线确定斜率集合,包括:对所述多个激光点云数据进行直线拟合,以得到所述多个激光点云数据对应的至少一条第一直线,其中,一条第一直线包括多个激光点云数据;确定第一激光点云数据和所述第一激光点云数据对应的斜率,所述第一激光点云数据为位于任意一条第一直线上的激光点云数据,所述第一激光点云数据对应的斜率为所述第一激光点云数据所在的第一直线的斜率;将各第一激光点云数据对应的斜率进行组合,得到所述斜率集合。通过对激光点云数据进行直线拟合并将拟合得到的直线与激光点云数据进行对应以确定斜率集合的方式,方式简单。
9、结合第一方面,在一种可能的实现方式中,所述基于所述多个激光点云数据进行直线检测,以得到所述多个激光点云数据对应的至少一条直线,并根据所述至少一条直线确定斜率集合,包括:对所述多个激光点云数据进行霍夫直线转换,以得到所述多个激光点云数据对应的多条第二直线,其中,一条第二直线对应一个激光点云数据;确定所述多条第二直线的直线交点;确定目标直线交点对应的目标斜率和相交于所述目标直线交点的第二直线的目标直线数量,所述目标直线交点为任一直线交点;根据各个直线交点对应的斜率和所述各个直线交点对应的直线数量,确定所述斜率集合,其中,所述斜率集合中包含的所述目标斜率的数量等于所述目标直线数量。通过对激光点云数据进行霍夫直线转换并通过确定霍夫直线的交点的斜率的方式来确定斜率集合,方式直观便捷。
10、结合第一方面,在一种可能的实现方式中,所述确定所述行走移动设备处于目标通道之前,还包括:计算所述斜率集合中的斜率的方差;在所述方差小于第一方差阈值的情况下,确定所述多个方向特征的一致程度大于预设程度。通过计算斜率集合中的斜率的方差来确定激光点云数据的方向特征的一致程度,方式简单。
11、结合第一方面,在一种可能的实现方式中,所述对所述多个激光点云数据进行方向特征检测,以得到所述多个激光点云数据对应的多个方向特征之前,还包括:对所述多个激光点云数据进行降噪处理;所述对所述多个激光点云数据进行方向特征检测,以得到所述多个激光点云数据对应的多个方向特征,包括:对降噪处理后的激光点云数据进行方向特征检测,以得到降噪处理后的激光点云数据对应的方向特征。在确定激光点云数据的方向特征之前对激光点云数据进行降噪处理,能够保证后续判断目标设备是否处于目标通道的准确度。
12、结合第一方面,在一种可能的实现方式中所述目标设备中设置有多种定位传感器,所述多种定位传感器包括所述激光雷达,所述多种定位传感器用于对所述目标设备进行定位;所述确定所述目标设备处于目标通道之后,还包括:调整目标设备中至少一种定位传感器对应的融合定位权重,以降低所述激光雷达在所述目标设备的定位过程中的权重占比。在确定目标设备处于长走廊环境之后,通过调整设备中的融合定位权重来降低激光雷达对于定位的权重占比,可以降低激光雷达对于目标设备定位的影响,从而可以提高设备定位的准确度。
13、第二方面,提供一种设备定位装置,包括:
14、数据获取模块,用于获取多个激光点云数据,所述多个激光点云数据为基于目标设备中设置的激光雷达获取到的;
15、特征检测模块,用于对所述多个激光点云数据进行方向特征检测,以得到所述多个激光点云数据对应的多个方向特征;
16、确定模块,用于在所述多个方向特征的一致程度大于预设程度的情况下,确定所述行走移动设备处于目标通道,其中,所述目标通道是指长度大于预设长度的通道。
17、第三方面,提供一种计算机设备,包括存储器以及一个或多个处理器,所述存储器连接至所述一个或多个处理器,一个或多个处理器用于执行存储在存储器中的一个或多个计算机程序,一个或多个处理器在执行一个或多个计算机程序时,使得该计算机设备实现上述第一方面的设备定位方法。
18、第四方面,提供一种计算机可读存储介质,计算机可读存储介质存储有计算机程序,计算机程序包括程序指令,上述程序指令当被处理器执行时使上述处理器执行上述第一方面的设备定位方法。
19、本技术可以实现如下技术效果:目标通道的长度大于预设长度,目标设备处于目标通道可以理解为目标设备处于长走廊环境,通过对多个激光点云数据进行方向特征检测的方式,为激光点云数据赋予方向特征,再通过判断激光点云数据的方向特征的一致程度,可以实现对目标设备是否处于目标通道(如长走廊环境)的精准检测,进而实现对目标设备的精准定位。
- 还没有人留言评论。精彩留言会获得点赞!