零偏误差自修正深层水平位移阵列式监测系统的制作方法
1.本发明涉及铁路检测技术领域,尤其涉及一种零偏误差自修正深层水平位移阵列式监测系统。
背景技术:
2.铁路边坡深层水平位移监测技术可实施反应不同深度岩土体水平位移、有效反应滑面发展趋势,对于实现岩土体长期稳定性监测与评估,进一步指导工程建设、保障线路安全运营具有十分重要的意义。
3.目前已有的深层水平位移监测系统常常采用微电子机械系统(micro electro mechanical system,mems)作为核心元件,通过解算单节传感器与重力加速度方向的夹角得出每节传感器倾斜位移量,然后通过位移叠加监测得出监测深度范围内不同层位的水平位移。该监测系统具有成本低,短时间精度高,操作简单的特点。现有技术cn105180795a公开了一种基于测斜和霍尔效应的岩土体变形测量方法及仪器系统,包括多个集成传感器单元下上依次串叠连接构成测量串并封装在热缩软橡塑管内,并放入地下岩土体,集中处理装置与各个集成传感器单元之间通过 485 串口依次连接,通过测斜 mems 电路测出集成传感器单元自身相对于地心垂线的倾斜角,通过霍尔效应测磁电路测出相邻集成传感器单元发出磁场的磁感应强度,根据测量模型得出相邻两个集成传感器单元之间的相对位移和每个集成传感器单元的倾斜角,从而获得岩土体地下的变形情况。现有技术cn203785651u公开了一种连续位移变化监测装置和系统,包括若干各测量节点和柔性万向节,各测量节点均包括刚性连接杆以及内置的电路板,电路板包括实现三维测量的两个mems加速度传感器。
4.但是,现有的深层水平位移监测系统客观存在传感器标度因数、非正交误差、温度漂移、零偏漂移等误差影响,直接安装应用不能十分可靠地反应深层岩土体的长期稳定性演化规律。对于标度因数误差、非正交误差、零偏误差及温度误差可通过构建合理的数学模型,通过三轴标定转台、人工气候室等专业设备确定模型参数,结合算法滤波降噪,消除上述类型误差对于测试结果的影响。但是对于零偏误差,由于受到标定时长限制、传感器元件个体差异等影响,目前尚无可用的补充方法,出厂前针对每一个元件进行长时间标定也不能满足大规模生产的效率与经济性要求。长期的零偏误差累积,对输出结果会产生较大的影响。
5.现有技术cn104110252a公开了一种基于惯性传感器的长大锚索钻孔孔道测量系统,并披露了通过马尔科夫运动模型的速度修正算法对原始三维坐标数据进行处理,消除重力、振动等对数据结果的影响,以及通过磁力传感器完成对倾斜误差的补偿,矫正运动惯性数据。现有技术cn 105452805a公开了一种周期性传感器阵列,传感器阵列由保持重力倾斜传感器的刚性体组成,所述刚性体由柔性接头连接,并披露了由已扭曲至超过其弹性极限的损坏接头产生的扭曲误差,通过具有倾斜传感器的刚性体的螺旋布置进行校正。已有的技术方案主要是针对系统误差中的标度因素误差、正交误差、短期内零偏误差以及噪声
误差,通过开展三轴转台标定、升降温试验、滤波器、采用螺旋方式布置刚形体等手段,构建误差修正模型,均可以有效消除此类误差。但是在长期监测过程中发现,零偏误差除环境温度影响显著外,还具有一定的时变性。针对这一点,已有的修正方法无法完全在有限时间和成本范围内有效解决这一难题。
6.如何克服上述现有技术方案的不足, 研发一种可以即时消除零偏误差的硬件结构,形成零偏误差修正方法,从根本上消除零偏误差对于测试结果的影响,从而实现深层岩土体稳定状态的长期准确监测,成为本技术领域亟待解决的课题。
技术实现要素:
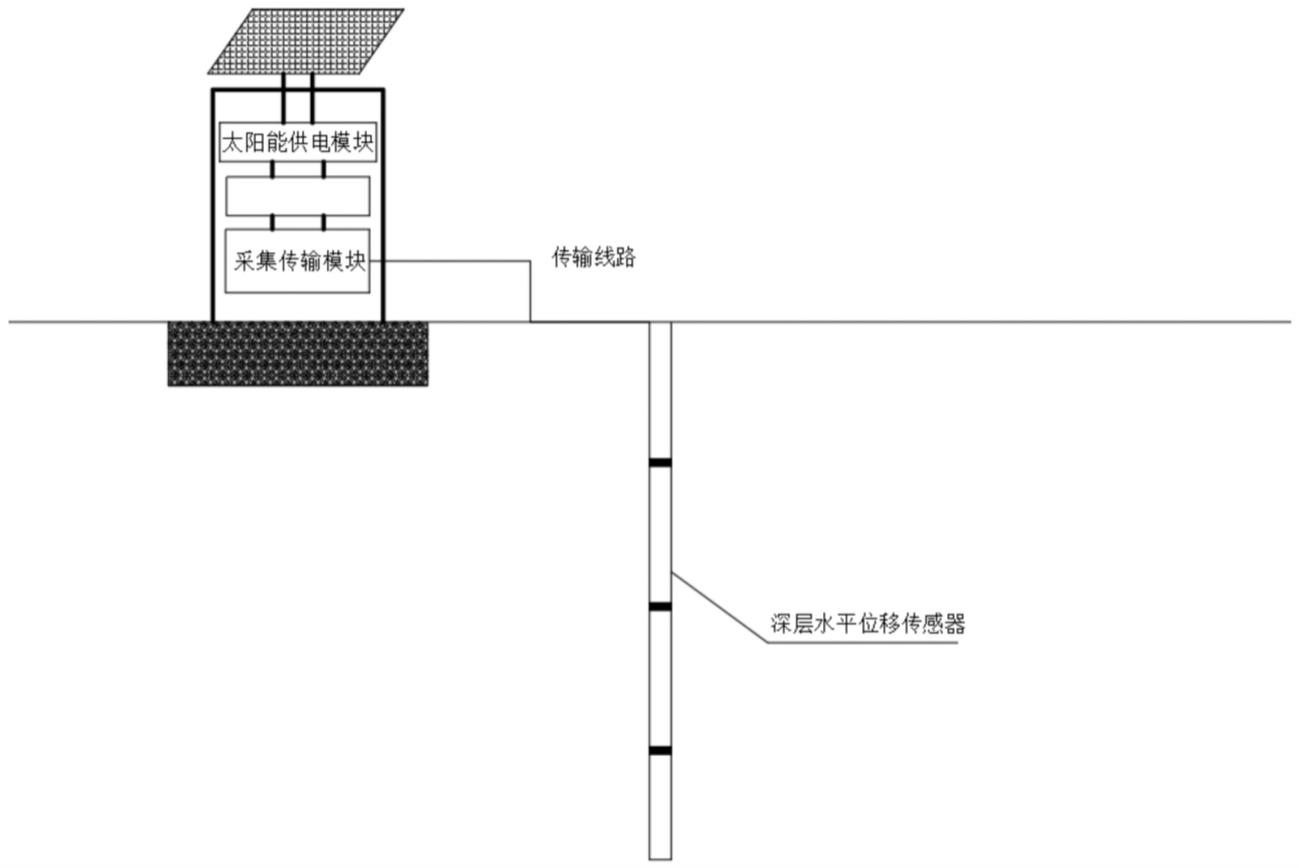
7.为克服上述现有技术的不足,本发明提供了一种零偏误差自修正深层水平位移阵列式监测系统,具体采用如下技术方案:一种零偏误差自修正深层水平位移阵列式监测系统,包括远程监测平台、地面控制单元、传输线路以及位于地下的零偏误差自修正传感器单元,所述地面控制单元通过所述传输线路与所述地下深层水平位移传感器单元连接;所述地面控制单元包括太阳能供电模块、采集传输模块;所述零偏误差自修正传感器单元包括高精度mems倾角感知元件、微型驱动电机、旋转机构框架、刚性护管、多向连接关节;所述微型驱动电机用于实现测量数据前所述高精度mems倾角感知元件沿所述刚性护管轴线的定向旋转。
8.所述旋转机构框架主要用于固定所述高精度mems倾角感知元件、微型驱动电机,保证其与所述刚性护管之间不发生相对运动。
9.进一步,所述太阳能供电模块用于向所述采集传输模块供电,并通过传输线路向所述零偏误差自修正传感器单元供电。
10.进一步,所述采集传输模块通过所述传输线路采集所述零偏误差自修正传感器单元发送的监测信号,对所述监测信号进行解算,并将解算结果与监测阈值进行比较,将监测信号以及比较结果发送到远程监测平台;所述采集传输模块还通过所述传输线路,发送控制信号至所述零偏误差自修正传感器单元。
11.进一步,所述刚性护管包括多组,每一组包括大体延竖直方向依次连接的多节,多组刚性护管设置在地下,形成监测阵列。
12.进一步,所述刚性护管用于传递岩土体侧向变形至所述高精度mems倾角感知元件,保护刚性护管内部元件的正常工作;相邻的两节刚性护管之间通过一个所述多向连接关节连接。
13.进一步,每节所述刚性护管中均安装有所述高精度mems倾角感知元件、微型驱动电机、旋转机构框架,所述传输线路穿过每节所述刚性护管,与所述高精度mems倾角感知元件、微型驱动电机连接,用于各节护管内倾角感知单元及微型电机的供电及信号传输。
14.进一步,所述高精度mems倾角感知元件通过感知其与重力加速度所在方向间的姿态关系,解算得到测量时刻所述刚性护管的倾斜角度,并将所述倾斜角度通过所述传输线路发送给所述采集传输模块。
15.进一步,所述远程监测平台和采集传输模块均包括通信模块,通过所述通信模块
实现所述远程监测平台和采集传输模块之间的有线和/或无线通信连接。
16.本发明还涉及一种基于零偏误差自修正的深层水平位移阵列式监测方法,用于如上所述的零偏误差自修正深层水平位移阵列式监测系统,包括下列步骤:s1.当一个所述高精度mems倾角感知元件的测量轴与重力加速度方向存在夹角时,进行正向测量,所述高精度mems倾角感知元件角度输出值为:
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(1)s2.进行反向测量,由所述采集传输模块控制所述微型驱动电机,将所述高精度mems倾角感知元件以所述刚性护管轴线为轴,定向旋转180
°
再次进行测量,其角度输出值为:
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(2)式中,、为所述高精度mems倾角感知元件旋转前后分别进行正向测量、反向测量的角度输出值;为两次相邻测量条件下所述高精度mems倾角感知元件的零偏误差, 为所述高精度mems倾角感知元件的标定系数;s3.所述高精度mems倾角感知元件将所述角度输出值、发送给所述采集传输模块;s4.所述采集传输模块进行结算操作,由式(1)和式(2)联立计算得到该高精度mems倾角感知元件所在层位的角度值:
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(3)s5.在最下方一节刚性护管的下方,设置下部基准点,其坐标为,同时以其为坐标原点,定义x轴、y轴,建立平面直角坐标系;s6.所述采集传输模块计算得到各节刚性护管端点的平面坐标为
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(4)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(5)式中:为所述下部基准点以上各刚性护管端点的序号;为第节刚性护管轴线方向与x轴方向的角度值;为第节刚性护管轴线方向与y轴方向的角度值;l为单节刚性护管的长度。
17.进一步,所述采集传输模块通过所述平面坐标,将各节刚性护管端点的偏移量与监测阈值进行比较,当偏移量超过所述监测阈值时,生成报警信息,并将报警信息
和各节刚性护管端点的平面坐标发送到所述远程监测平台。
18.本发明主要面向目前市场上阵列式深层水平位移监测系统存在的零漂误差消除难题,在已有温度误差、标度因数误差等修正方法的基础上,通过硬件上研发精密微型定量旋转机构,开发针对性的零偏误差修正算法,实现长期服役过程中零偏误差的旋转自修正,从而满足长期服役过程中岩土体变形缓慢发展工况下的高精度、高可靠识别。
附图说明
19.图1为本发明零偏误差自修正深层水平位移阵列式监测系统的示意图。
20.图2为本发明零偏误差自修正传感器单元的示意图。
具体实施方式
21.下面结合附图对本发明作进一步描述。以下实施例仅用于更加清楚地说明本发明的技术方案,而不能以此来限制本发明的保护范围。应该指出,以下详细说明都是示例性的,旨在对本技术提供进一步的说明。
22.除非另有指明,本文使用的所有技术和科学术语具有与本技术所属技术领域的普通技术人员通常理解的相同含义。需要注意的是,这里所使用的术语仅是为了描述具体实施方式,而非意图限制根据本技术的示例性实施方式。如在这里所使用的,除非上下文另外明确指出,否则单数形式也意图包括复数形式,此外,还应当理解的是,当在本说明书中使用术语“包含”和/或“包括”时,其指明存在特征、步骤、操作、器件、组件和/或它们的组合。
23.本发明的具体实施例涉及一种零偏误差自修正深层水平位移阵列式监测系统。
24.本发明的零偏误差自修正深层水平位移阵列式监测系统,包括地面控制单元、传输线路,以及位于地下的零偏误差自修正传感器单元。所述地面控制单元通过所述传输线路与所述地下深层水平位移传感器单元连接。
25.所述地面控制单元包括太阳能供电模块、采集传输模块。
26.所述太阳能供电模块用于向所述采集传输模块供电,并通过传输线路向所述零偏误差自修正传感器单元供电。使用太阳能供电,能够保证野外无人值守监测环境下监测系统的长期供电,保障监测系统长期稳定服役。
27.所述采集传输模块可以设置监测阈值,并通过所述传输线路采集所述零偏误差自修正传感器单元发送的监测信号。所述采集传输模块通过对述监测信号进行解算,并将解算结果与所述监测阈值进行比较,进而将监测信号以及比较结果发送到远程监测平台。所述采集传输模块还通过所述传输线路,发送控制信号至所述零偏误差自修正传感器单元。所述采集传输模块能够实现监测系统信号的本地解算、阈值设置、信号发送。
28.所述零偏误差自修正传感器单元包括高精度mems倾角感知元件、微型驱动电机、旋转机构框架、刚性护管、多向连接关节。
29.所述刚性护管包括多组,每一组包括大体延竖直方向依次连接的多节,多组刚性护管设置在地下,形成监测阵列。
30.所述刚性护管用于传递岩土体侧向变形至所述高精度mems倾角感知元件,保护刚性护管内部元件的正常工作。多节刚性护管可以分别传递多个层位岩土体的变形。
31.相邻的两节刚性护管之间通过一个所述多向连接关节连接。所述多向连接关节能够保持各节刚性护管之间位移连续传递。
32.每节所述刚性护管中均安装有所述高精度mems倾角感知元件、微型驱动电机、旋转机构框架,所述传输线路穿过每节所述刚性护管,与所述高精度mems倾角感知元件、微型驱动电机连接,用于各节护管内倾角感知单元及微型电机的供电及信号传输。
33.所述高精度mems倾角感知元件通过感知其与重力加速度所在方向间的姿态关系,解算得到测量时刻所述刚性护管的倾斜角度,并将所述倾斜角度通过所述传输线路发送给所述采集传输模块。
34.所述微型驱动电机用于实现测量数据前所述高精度mems倾角感知元件沿所述刚性护管轴线的定向旋转。
35.所述旋转机构框架主要用于固定所述高精度mems倾角感知元件、微型驱动电机,保证其与所述刚性护管之间不发生相对运动。旋转机构框架包括外螺纹、限位框,通过外螺纹与刚性护管内部螺纹紧密耦合;旋转机构限位框内嵌微型驱动电机,使其连接稳定可靠。
36.本发明零偏误差自修正深层水平位移阵列式监测系统,其具体工作过程如下。
37.当一个所述高精度mems倾角感知元件的测量轴与重力加速度方向存在夹角时,进行正向测量,即在所述高精度mems倾角感知元件旋转前,其角度输出值为:
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(1)之后,进行反向测量,即所述采集传输模块控制所述微型驱动电机,将所述高精度mems倾角感知元件以所述刚性护管轴线为轴,定向旋转180
°
再次进行测量,此时,其角度输出值为:
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(2)式中,、为所述高精度mems倾角感知元件旋转前后分别进行正向测量、反向测量的角度输出值;为两次相邻测量条件下所述高精度mems倾角感知元件的零偏误差,两次测量可认为为定值;为所述高精度mems倾角感知元件的标定系数。
38.所述高精度mems倾角感知元件将所述角度输出值、发送给所述采集传输模块。
39.由式(1)和式(2)联立,由所述采集传输模块计算得到该高精度mems倾角感知元件所在层位的角度值:
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(3)在最下方一节刚性护管的下方,设置下部基准点,其坐标为,同时以其为坐标原点,定义x轴、y轴,建立平面直角坐标系,所述采集传输模块可计算得到各节刚性护管上端点的平面坐标为
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(4)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(5)式中:为所述下部基准点以上各刚性护管端点的序号;为第节刚性护管轴线方向与x轴方向的角度值;为第节刚性护管轴线方向与y轴方向的角度值;l为单节刚性护管的长度。
40.所述采集传输模块通过所述平面坐标,将各节刚性护管端点的偏移量与监测阈值进行比较,当偏移量超过所述监测阈值时,生成报警信息,并将报警信息和各节刚性护管端点的平面坐标发送到远程监测平台。
41.本发明基于mems倾角感知元件的误差来源及特性,借助mems倾角感知元件定向旋转装置,可以实现刚性护管内有限空间环境下的精密旋转控制,通过设置微型旋转电机实现零偏误差的自修正,可按照采集传输模块的指令对mems感知单元进行定向旋转,并通过在软件中嵌入误差修正方法,根据旋转前后测得的倾角数据,对前后数据进行运算,消去误差项,得到此倾角测量值,实现深层岩土体长期变形的可靠监测。
42.如上所述仅是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明技术原理的前提下,还可以做出若干改进和变形,这些改进和变形也应视为本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1