一种扫描雷达自适应角超分辨快速重建方法
1.本发明属于雷达探测与成像领域,具体涉及一种扫描雷达自适应角超分辨快速重建方法。
背景技术:
2.扫描雷达通过雷达波束扫描能够快速地获取全方位的目标探测信息,但其角分辨率受限于天线尺寸,通常较低。
3.为了提升扫描雷达的角分辨率,文献“kusama,k.,i.arai,k.motomura,m.tsunoda,and x.wu.compression of radar beam by deconvolution.noise and clutter rejection in radars and imaging sensors(1990):767-772.”从回波时域出发,提出了一种卷积反演角超分辨成像方法,该方法虽可提升目标角分辨率,但是该方法存在高维矩阵求逆,随着回波方位维度的增加,其运算量巨大。随后,文献“h.-r.park and j.li,efficient sparse parameter estimation based methods for two-dimensional doaestimation of coherent signals,iet signal processing,vol.14,no.9,pp.643
–
651,2020.”从回波频域出发,提出了一种渐近最小方差估计方法,该方法有效降低了算法的运算复杂度,但该方法重建的角分辨率有限。文献“abeida,habti,qilin zhang,jian li,and nadjim merabtine.iterative sparse asymptotic minimum variance based approaches for array processing.ieee transactions on signal processing 61,no.4(2012):933-944.”提出了一种稀疏渐近最小方差估计(samv)方法,该方法能够大幅提高目标的重建分辨率,但是由于其稀疏惩罚参数是离散设置的(取0,1,2),难以根据场景类型自适应地进行选择。
技术实现要素:
4.为解决上述技术问题,本发明提出了一种扫描雷达自适应角超分辨快速重建方法。
5.本发明的技术方案为:一种扫描雷达自适应角超分辨快速重建方法,具体步骤如下:
6.步骤一、扫描雷达方位频域回波模型建立,
7.实孔径雷达,通过雷达波束对目标进行扫描,其回波信号沿方位向可以描述为天线方向图函数和目标散射系数的卷积,在第m个回波距离单元,方位回波信号可以表示为:
8.ym=hsm+emꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(1)
9.其中,表示回波样本,表示转向矩阵,表示目标散射系数,表示加性噪声,n和k分别表示方位角采样点和目标网格的数量。表示矩阵的维度为k行l列。
10.式(1)中回波数据,可以通过傅里叶变换将时域回波数据变换至频域,可以表示为:
11.fym=fhsm+femꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(2)
12.其中,表示傅里叶转向矩阵,可以具体地表示为:
[0013][0014]
步骤二、扫描雷达回波阵列映射模型变换,
[0015]
式(2)从频域表示了回波数据的特性,经傅里叶变换后,方位频域回波数据划分为天线方向图通带和噪声阻带信号,为了从回波频域提高目标的信噪比,式(2)中的频域模型可以通过数据截断表示为:
[0016]
tfym=tfhsm+tfemꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(4)
[0017]
其中,表示归一化空间通带截断矩阵,d=0.886n/n
β
,n
β
表示主瓣波束宽度的采样数。由于天线方向图测量矩阵h为toplitz矩阵,其可被分解为:
[0018]
h=f
*
γf
ꢀꢀꢀꢀꢀꢀꢀꢀ
(5)
[0019]
其中,*表示共轭转置运算,γ是对角矩阵,其对角元素是它的奇异值,按降序对幅度谱值进行排序,排序后的幅度谱与修复后的转向矩阵的奇异值相同,将式(5)代入式(4),可得:
[0020]
tfym=tγfsm+tfemꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(6)
[0021]
对于矩阵fh的第u+1列,当波束中心指向0
°
时,天线方向图的傅里叶变换可以表示为:
[0022][0023]
其中,h(θn)表示扫描波束指向第n个方位单元θn时天线方向图幅度,n=1,
…
,n表示方位采样点序号,ωu=2πu/n,u=0,
…
,n-1表示第u个数字归一化频率,当波束中心指向偏转角θc时,对应fh的列的傅里叶变换表示为:
[0024][0025]
其中,δθ=ωs/prf表示相邻采样脉冲之间的角度间隔,ωs表示角扫描速度,prf表示脉冲重复频率,ω表示扫描范围。
[0026]
假设存在一个均匀线阵,其天线阵元数为d,相邻阵元之间的阵元间距为d。对于一个位于θi,i=1,
…
,ε方向的目标,ε可以表示为n>>d>ε,其回波数据在相邻天线阵元之间产生的相位差为:
[0027][0028]
其中,λ是传输信号的波长,因此,对于式(8)所示的回波信号,可以在空间中映射为一个天线阵元数为d
′
,相邻阵元之间的阵元间距为d
′
的阵列为:
[0029][0030]
其中,ε
′
表示映射阵列照射场景中的有效目标个数,由式(10)可以导出,映射阵列的天线阵元数与相邻阵元间距,可以表示为:
[0031][0032]
其中,θ
β
表示雷达主瓣的波束宽度。
[0033]
通常在应用中,映射阵列照射场景中的有效目标个数,远远少于方位采样单元数。将式(11)引入式(6)中的数据模型,归一化阵列映射模型可以表示为:
[0034]
y=as+e
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(12)
[0035]
其中,表示目标空间谱的有效截断通带数据,表示有效目标散射系数,是噪声的空间谱,表示归一化空间谱测量矩阵,可以展开地表示为:
[0036][0037]
步骤三、目标依赖的广义渐近最小方差估计,
[0038]
式(13)提出的归一化阵列映射模型,可以降低回波数据的维度,为目标的快速超分辨重建奠定基础,基于式(13)中的回波模型,为了通过广义渐进最小方法估计方法,实现目标的超分辨率重建,首先可定义回波自相关矩阵为:
[0039]
r=bpb
*
+σ2i
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(14)
[0040]
其中,表示依赖于扫描分析网格的转向矩阵,式中各项为对分析扫描矩阵的列向量,g为扫描分析网格数,g=0,
…
,g-1表示扫描分析网格序号,表示每个扫描分析网格中的信号功率矩阵,p=(p0,
…
,p
g-1
)为每个扫描分析网格中的信号功率向量,σ2表示映射阵元的噪声方差,表示单位矩阵。
[0041]
其次,回波自相关矩阵还可以通过rd=yy
*
来计算。根据相关拟合准则,可以建立以下代价函数:
[0042][0043]
其中,表示功率列分块后的最优估计,rd=vec(rd),vec(
·
)表示向量化运算,
表示kronecker积,基于渐进最小方差准则,回波自相关矩阵向量rd服从与和cr相关的复高斯分布,即:
[0044][0045]
其中,cn(v,z)表示服从以均值为v,方差为z的复高斯分布,且目标自相关估计向量vec(r)可以表示为:
[0046][0047]
其中,表示式(14)中转向矩阵各列向量进行kroneker积构成的测量矩阵,表示信号功率及噪声方差构成的向量;。
[0048]
通过最小化式(15),目标的迭代重建过程可以表示为:
[0049][0050][0051]
其中,表示第i次迭代中第g个网格的估计信号功率,表示第i+1次迭代中第g个网格的估计噪声功率,表示第i+1次迭代中第g个网格的估计噪声功率的平方,上标(i)指的是第i次迭代的中间变量,r-1(i)
表示第i次迭代中自相关矩阵r的逆,r-2(i)
则表示第i次迭代中r2的逆,tr(
·
)表示矩阵的迹。
[0052]
为了实现不同类型目标场景下目标的自适应重建,利用经典capon的估计结果,式(18)和式(19)所示的迭代公式,可广义化地转化为:
[0053][0054][0055]
其中,η∈[0,2]表示广义最小渐进方差估计方法的惩罚参数,当η离散化地取值为0,1,2时,该方法将转化为经典的稀疏渐进最小方差(samv)算法,可以表示为samv-0/1/2方法,通过对惩罚参数的广义化与自适应选择,可以使该方法适用于不同类型的目标场景。
[0056]
最后,基于式(20)和(21)的迭代公式,可以设定阈值为基于每次迭代的结果判断重建结果中,有效目标所在的单元,式(20)和(21)的迭代过程可以转化依赖与有效目标的更新过程,可以表示为:
[0057][0058][0059]
其中,ωg表示有效目标更新网格集合,表示第i次迭代时集合ωg中第g个有效目标单元的信号功率,初始化结果可通过阵列映射数据的傅里叶逆变换获得。表示矩阵b的第g个转向向量,是有效目标单元的自相关矩阵。当有效目标单元的相邻迭代结果差小于阈值δη时,则不再对该单元目标进行更新。
[0060]
步骤四、惩罚参数选择与自适应重建,
[0061]
式(22)、式(23)中为了实现其惩罚参数η的自适应选取,通过分析可知,随着广义惩罚参数的增加,方位分辨率会提高,目标稀疏性也会提高。随着广义惩罚参数的减小,方位分辨率会降低,目标稀疏性也会降低。
[0062]
因此,定义重建后目标的平均稀疏度为:
[0063][0064]
其中,ls为广义参数为η时,第m个重构有效距离单元为pm时的平均稀疏度,m'为有效距离单元的个数。zt(
·
)=sum(pm≤δδ)表示归一化目标功率低于阈值的无效目标网格的数量,δδ为目标功率的阈值,pm为第m个重构有效距离单元。
[0065]
最后,根据目标场景类型,当关注于场景中的稀疏目标时,惩罚参数通常选择在区间[1,2]。在遍历惩罚参数时,可自适应地选择为相邻平均稀疏度接近不变化时的值。当关注于场景中的复杂目标时,惩罚参数通常选择在区间[0,1]。在遍历惩罚参数时,可自适应地选择平均稀疏度开始减小时的最大值。待确定惩罚参数后,回到步骤三,实现目标场景的快速自适应超分辨重建。
[0066]
本发明的有益效果:本发明的方法首先建立扫描雷达方位频域回波模型,将扫描雷达的传统卷积信号模型转换为归一化阵列映射模型,降低数据处理维度,然后,采用广义自适应渐近最小方差方法,通过在逐次迭代中仅更新有效目标单元,实现目标的快速超分辨重建,最后,根据场景类型与目标稀疏度的变化关系,自适应地选择广义惩罚参数。本发明的方法与传统角超分辨方法相比,通过仅更新有效目标单元,可降低算法的运算时间,能够在高方位数据维度下,实现目标的自适应快速重建。
附图说明
[0067]
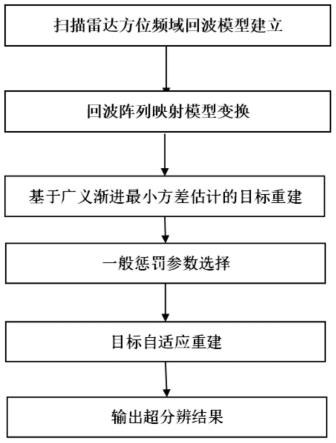
图1为本发明的一种扫描雷达自适应角超分辨快速重建方法的流程图。
[0068]
图2为本发明实施例中平均稀疏度与广义惩罚参数之间的关系图。
[0069]
图3为本发明实施例中目标场景与实波束回波。
[0070]
图4为本发明实施例中不同方法超分辨结果对比。
[0071]
图5为本发明实施例中不同方位维度下不同方法的运算时间。
具体实施方式
[0072]
下面结合附图和实施例对本发明方法做进一步的阐述。
[0073]
本发明主要采用仿真实验的方法进行验证,所有步骤、结论都在matlab2019上验证正确,如图1所示,本发明的一种扫描雷达自适应角超分辨快速重建方法流程图,具体步骤如下:
[0074]
步骤一、扫描雷达方位频域回波模型建立,
[0075]
实孔径雷达的回波信号沿方位向可以描述为天线方向图函数和目标散射系数的卷积,在第m个回波距离单元,方位回波信号可以表示为:
[0076]
ym=hsm+emꢀꢀꢀꢀꢀꢀꢀꢀ
(25)
[0077]
其中,表示回波样本,表示转向矩阵,表示目标散射系数,表示加性噪声,n=1200和k=1000分别表示方位角采样点和目标网格的数量,表示该矩阵的维度为m
×
n。
[0078]
式(25)中回波数据,可以通过傅里叶变换将时域回波数据变换至频域,可以表示为:
[0079]
fym=fhsm+femꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(26)
[0080]
其中,表示傅里叶转向矩阵,可以具体地表示为:
[0081][0082]
步骤二、扫描雷达回波阵列映射模型变换,
[0083]
式(26)从频域表示了回波数据的特性,为了从回波频域提高目标的信噪比,式(26)中的频域模型可以通过数据截断表示为:
[0084]
tfym=tfhsm+tfemꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(28)
[0085]
其中,表示归一化空间通带截断矩阵,d=0.886n/n
β
,n
β
表示主瓣波束宽度的采样数。由于天线方向图测量矩阵h为toplitz矩阵,其可被分解为:
[0086]
h=f
*
γf
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(29)
[0087]
其中,*表示共轭转置运算,γ是一个对角矩阵,其对角元素是它的奇异值,按降序对幅度谱值进行排序,排序后的幅度谱与修复后的转向矩阵的奇异值相同,将式(29)代入式(28),可得:
[0088]
tfym=tγfsm+tfemꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(30)
[0089]
对于矩阵fh的第u+1列,当波束中心指向0
°
时,天线方向图的傅里叶变换可以表示为:
[0090][0091]
其中,h(θn)表示扫描波束指向第n个方位单元θn时天线方向图幅度,n=1,
…
,n表示方位采样点序号,ωu=2πu/n,u=0,
…
,n-1表示第u个数字归一化频率,当波束中心指向
偏转角θc时,对应fh的列的傅里叶变换表示为:
[0092][0093]
其中,δθ=ωs/prf表示相邻采样脉冲之间的角度间隔,ωs=60
°
/s代表角扫描速度,prf=2khz是脉冲重复频率,而ω=-10
°‑
10
°
表示方位扫描范围。
[0094]
假设存在一个均匀线阵,其天线阵元数为d,相邻阵元之间的阵元间距为d,对于一个位于θi,i=1,
…
,ε方向的目标,ε可以表示为n>>d>ε,其回波数据在相邻天线阵元之间产生的相位差为:
[0095][0096]
其中,λ=9.76mm是传输信号的波长,对于式(32)所示的回波信号,可以在空间中映射为一个天线阵元数为d
′
,相邻阵元之间的阵元间距为d
′
的阵列为:
[0097][0098]
其中,ε
′
表示映射阵列照射场景中的有效目标个数,由式(34)可以导出,映射阵列的天线阵元数与相邻阵元间距,可以表示为:
[0099][0100]
其中,θ
β
表示雷达主瓣的波束宽度。
[0101]
通常在应用中,映射阵列照射场景中的有效目标个数,远远少于方位采样单元数,将式(35)引入式(30)中的数据模型,归一化阵列映射模型可以表示为:
[0102]
y=as+e
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(36)
[0103]
其中,表示目标空间谱的有效截断通带数据,表示有效目标散射系数。是噪声的空间谱,表示归一化空间谱测量矩阵,可以展开地表示为:
[0104][0105]
步骤三、目标依赖的广义渐近最小方差估计,
[0106]
基于式(37)中的回波模型,为了通过广义渐进最小方法估计方法,实现目标的超分辨率重建,首先可定义回波自相关矩阵为:
[0107]
r=bpb
*
+σ2i
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(38)
[0108]
其中,表示依赖于扫描分析网格的转向矩阵,式中各项为对分析扫描矩阵的列向量,g为扫描分析网格数,g=0,
…
,g-1表示扫描分析网格序号,表示每个扫描分析网格中的信号功率矩阵,p=(p0,
…
,p
g-1
)为每个扫描分析网格中的信号功率向量,σ2表示映射阵元的噪声方差,表示单位矩阵。
[0109]
其次,回波自相关矩阵还可以通过rd=yy
*
来计算。根据相关拟合准则,可以建立以下代价函数为:
[0110][0111]
其中,表示功率列分块后的最优估计,rd=vec(rd),vec(
·
)表示向量化运算。)表示向量化运算。表示kronecker积。基于渐进最小方差准则,回波自相关矩阵向量rd服从与和cr相关的复高斯分布,即:
[0112][0113]
其中,cn(v,z)表示服从复高斯分布,且目标自相关估计向量vec(r)可以表示为:
[0114][0115]
其中,表示式(38)中转向矩阵各列向量进行kroneker积构成的测量矩阵,表示信号功率及噪声方差构成的向量。
[0116]
通过最小化式(39),目标的迭代重建过程可以表示为:
[0117][0118][0119]
其中,表示第i次迭代中第g个网格的估计信号功率,表示第i+1次迭代中第g个网格的估计噪声功率,表示第i+1次迭代中第g个网格的估计噪声功率的平方,上标(i)指的是第i次迭代的中间变量,r-1(i)
表示第i次迭代中自相关矩阵r的逆,r-2(i)
则表示第i次迭代中r2的逆,tr(
·
)表示矩阵的迹。
[0120]
为了实现不同类型目标场景下目标的自适应重建,利用经典capon的估计结果,式(42)和式(43)所示的迭代公式,可广义化地转化为:
[0121]
[0122][0123]
其中,η∈[0,2]表示广义最小渐进方差估计方法的惩罚参数,当η离散化地取值为0,1,2时,该方法将转化为经典的稀疏渐进最小方差(samv)算法,可以表示为samv-0/1/2方法。通过对惩罚参数的广义化与自适应选择,可以使该方法适用于不同类型的目标场景。
[0124]
最后,基于式(44)和(45)的迭代公式,可以设定阈值为基于每次迭代的结果判断重建结果中,有效目标所在的单元。式(44)和(45)的迭代过程可以转化依赖与有效目标的更新过程,可以表示为:
[0125][0126][0127]
其中,ωg表示有效目标更新网格集合,表示第i次迭代时集合ωg中第g个有效目标单元的信号功率,初始化结果可通过阵列映射数据的傅里叶逆变换获得。表示矩阵b的第g个转向向量,是有效目标单元的自相关矩阵。当有效目标单元的相邻迭代结果差小于阈值δη=0.001时,则不再对该单元目标进行更新。
[0128]
步骤四、惩罚参数选择与自适应重建,
[0129]
式(46)、式(47)中为了实现其惩罚参数η的自适应选取,通过分析可知,随着广义惩罚参数的增加,方位分辨率会提高,目标稀疏性也会提高。随着广义惩罚参数的减小,方位分辨率会降低,目标稀疏性也会降低。
[0130]
因此,定义重建后目标的平均稀疏度为:
[0131][0132]
其中,ls为广义参数为η时,第m个重构有效距离单元为pm时的平均稀疏度,m'为有效距离单元的个数。zt(
·
)=sum(pm≤δδ)表示归一化目标功率低于阈值的无效目标网格的数量,δδ为目标功率的阈值,pm为第m个重构有效距离单元。
[0133]
最后,根据目标场景类型,当关注于场景中的稀疏目标时,惩罚参数通常选择在区间[1,2]。在遍历惩罚参数时,可自适应地选择为相邻平均稀疏度接近不变化时的值,如图2中的点p1所示。当关注于场景中的复杂目标时,惩罚参数通常选择在区间[0,1]。在遍历惩罚参数时,可自适应地选择平均稀疏度开始减小时的最大值,如图2中的p2所示。待确定惩罚参数后,回到步骤三,实现目标场景的快速自适应超分辨重建。
[0134]
根据表1所示的雷达平台的系统参数,系统仿真场景与回波数据如图3所示,其中图3(a)为原始目标场景,图3(b)为实波束回波数据。回波信噪比(snr)为10db。
[0135]
表1
[0136]
参数数值
工作频段30.75ghz带宽30mhz时宽2μs采样频率45mhz扫描速度60
°
/s波束宽度4
°
脉冲重复频率2khz方位扫描范围-10
°‑
10
°
距离范围3km-4km
[0137]
图4(a)为samv-0方法的结果,其分辨率较低。通过增加重新加权因子,图4(b)中samv-1方法能够提高目标分辨能力。图4(c)中,samv-2方法能够进一步提高目标角分辨率,但由于对目标强度的过度重加权,导致存在目标丢失现象。图4(d)中,本发明的方法通过自适应地选择惩罚参数,重构结果可以在不丢失目标的情况下实现高方位分辨率,且运算复杂度低。
[0138]
图5为随着方位数据维度的增加,基于samv方法和本发明的方法运算时间的对比。可以看出,本发明的一种扫描雷达自适应角超分辨快速重建方法,通过仅更新有效目标单元,可降低算法的运算时间,能够在高方位数据维度下,实现目标的自适应快速重建。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1