一种高压模拟舱环境下水液压驱动的取样装备及维护方法与流程
1.本发明涉及压力容器辅助作业装备技术领域,尤其是一种高压模拟舱环境下水液压驱动的取样装备及维护方法。
背景技术:
2.可燃冰分解、甲烷渗漏及其伴生的海底冷泉活动,是目前全球变化研究中的热点问题。
3.目前,国内外在开展冷泉发育演化相关试验研究时,均需要在压力容器内构建高压湿硫化氢海水环境来模拟冷泉发育演化的真实环境。由于试验持续时间长、试验环境完全密封,导致模拟舱内的生物、海水以及沉积物的在线实时取样成为一大难题。
4.现有技术中,水下机械手具备一定的取样能力,但目前水下机械手的技术成熟度不高,且关节自由度较少,难以满足模拟舱内取样作业的需求。此外,水下机械手的驱动部件主要依靠电机驱动或液压执行元件驱动,电驱机械手在高压环境下需要进行充油补偿,常规油液压驱动不可避免的会产生液压油泄露,同时常规水下机械手均采用油或脂润滑,液压油及润滑油脂的泄漏扩散会污染模拟舱内的生态环境,影响生物培育,由于模拟舱内存在液态及气态的硫化氢及甲烷,使用电机驱动也存在打火爆炸的安全隐患。
技术实现要素:
5.本技术人针对上述现有生产技术中的缺点,提供一种高压模拟舱环境下水液压驱动的取样装备及维护方法,从而可以方便的实现在含有气液态的硫化氢及甲烷的高压海水环境下模拟舱内的生物、海水以及沉积物的在线实时取样,并且保证了作业全过程的安全性以及生物友好性。
6.本发明所采用的技术方案如下:
7.一种高压模拟舱环境下水液压驱动的取样装备,包括试验舱,试验舱内有取样对象,所述试验舱的一侧设置有干湿转换舱,所述干湿转换舱的前部和后部均设置有舱门,所述干湿转换舱的内部安装有平移机构,所述平移机构的头部通过基座回转关节安装有作业机构;
8.平移机构的结构为:包括与干湿转换舱固定的底座,所述底座上设置有两块安装导向板,每块安装导向板上设置有两块导向减摩板,安装导向板上配合安装有平移水缸,平移水缸的活塞杆与平移基座通过球铰铰接,还包括导向轨道,导向轨道与平移水缸的缸体连接,平移基座沿导向轨道滑动;
9.作业机构包括机械臂和机械手爪两大部分,机械臂设置有五个自由度,机械臂主要包括基座回转关节,基座回转关节外部连接主臂俯仰关节、副臂转动关节、副臂伸缩关节以及腕部转动关节,机械手爪设置有二个自由度,机械手爪包括手爪摆动关节以及手爪夹持关节。
10.其进一步技术方案在于:
11.所述平移水缸为水介质驱动的直线缸,共设置有两组。
12.所述平移水缸的缸体法兰底部开设有矩形凹槽,与安装导向板上的凸槽进行配合,实现导向以及相对滑动,平移水缸的缸体法兰底面与导向减摩板接触,导向减摩板为高分子减摩材料,在无润滑或水润滑条件下,实现与平移水缸底面的低摩擦系数。
13.所述平移基座的两侧设置有减摩块。
14.所述基座回转关节的结构为:包括平移基座,所述平移基座底部设置有回转摆动缸,所述平移基座的上部固定有空心圆柱体结构的固定基座,所述固定基座的外部通过上减摩环和下减摩环安装回转基座,所述回转摆动缸的输出端通过联轴器连接传动轴,所述传动轴伸出固定基座和回转基座的顶部。
15.所述回转摆动缸位齿轮齿条式摆动缸。
16.所述主臂俯仰关节实现作业机构的俯仰运动,基座回转关节的外部铰接主臂水缸,主臂水缸与主臂连接,所述主臂的头部安装有副臂转动关节,副臂转动关节用于实现作业机构副臂的转动工作,主臂底部设置有三角板,所述三角板与主臂中部之间安装副臂转动水缸,副臂的外部还通过连杆与三角板连接;副臂伸缩关节包括副臂伸缩水缸、伸缩导向架、伸缩减摩板、腕部基座,副臂伸缩水缸活塞杆与腕部基座固定连接,伸缩减摩板固定在伸缩导向架的导向槽内,伸缩导向架前端与腕部基座固定连接,同时沿着副臂进行滑动,副臂伸缩关节通过副臂伸缩水缸活塞杆的伸缩带动腕部基座以及伸缩导向架沿着副臂进行平移运动,实现作业机构前端关节的伸缩运动;腕部转动关节由齿轮齿条式水液压摆动缸实现180
°
的转动,腕部转动关节包括腕部摆动缸、腕部基座、腕部传动轴以及手爪转动基座,腕部摆动缸固定于腕部基座上,输出轴与腕部传动轴相连接,腕部传动轴与手爪转动基座通过键连接实现传动,进而实现腕部摆动缸带动手爪转动基座绕着腕部基座转动,在腕部基座上布置有一组水下摄像机和水下照明灯。
17.所述伸缩导向架顶部安装有一号避障声呐,主臂的顶部安装有二号避障声呐。
18.机械手爪包括手爪摆动缸、交叉爪开合水缸以及交叉爪,手爪摆动缸为齿轮齿条式摆动缸,驱动介质为水,手爪摆动缸直接驱动开合爪实现摆动功能,手爪夹持由交叉爪开合水缸带动连杆机构实现交叉爪的张开和闭合。
19.一种高压模拟舱环境下水液压驱动的取样装备及维护方法,包括如下操作步骤:
20.第一步:检查工作,对取样装备的各关节进行自检,确认各关节功能是否正常,摄像机及照明灯是否正常,若出现功能异常,打开干湿转换舱尾部的舱门,将取样装备平移出舱,进行检修;
21.第二步:检修完毕后,复位;
22.第三步:将干湿转换舱内注入海水并排气,直至与试验舱的压力达到平衡;
23.第四步:打开干湿转换舱前部的舱门;
24.第五步:平移机构启动工作,将作业机构沿轨道推出至试验舱内;
25.第六步:根据所需要执行的作业任务,操作作业机构的机械手抓取对应的作业工具,准备开展作业;
26.第七步:操作取样装备进行相应的作业任务,通过手动操作或自动控制的方式进行作业,在作业过程中,当一号避障声呐触发报警时,作业机构将停止向报警方向运动,直至操作至安全位置时,报警取消;
27.第八步:当完成作业任务后,可通过手动或自动的方式控制使机构回原位,并将手爪夹持的工具以及样品放回;
28.第九步:关节归零,作业机构完全折叠至放置状态,平移机构工作,带动设备进舱,干湿转换舱前部的舱门关闭;
29.第十步:对干湿转换仓进行卸压,排空海水;
30.第十一步:当完成排水后,重新将干湿转换舱注满淡水,并静置三天,目的在于稀释取样装备上的残留海水,降低腐蚀;
31.第十二步:排空淡水,并打开干湿转换舱尾部的舱门,向内部进行吹风,目的在于风干取样装备上的淡水;
32.第十三步:关闭干湿转换舱尾部舱门,舱内充满氮气,完成整个操作维护,等待下次工作。
33.本发明的有益效果如下:
34.本发明结构紧凑、合理,操作方便,通过平移机构以及作业机构,平移机构与模拟舱中的干湿转换舱相连接,其主要作用为承载作业机构并实现作业机构的进出舱,作业机构具备八个自由度,主要用于实现模拟舱内的生物、海水以及沉积物的在线实时取样。
35.同时,本发明还具备如下优点:
36.(1)本发明采用水液压驱动以及水润滑,驱动介质不含任何添加剂,同时整个设备完全无油,有效保证了模拟舱内生态环境不受污染,具备生物友好性。
37.(2)本发明各运动机构的驱动元件均不采用电驱,有效避免了在含气液态的硫化氢及甲烷环境下工作而引发的打火爆炸的风险,保证了取样过程的安全性。
38.(3)本发明各运动机构的传感器均采用干式密封的位移传感器,避免了采用旋转编码器带来的高压干式动密封不可靠以及充油补偿式动密封由于补偿油泄漏带来的污染问题。
39.(4)本发明所提出的取样作业设备具备8个自由度,大大提高了设备的作业覆盖面积,通过各动作模块的组合运动,能够实现的模拟舱内的设备维护、检修和更换、实时取样等功能,作业形式多样。
40.(5)本发明结构紧凑,集成化程度高,能够解决空间高效利用与进出舱作业干涉等问题,空间占用少,有效缩减了模拟舱内放置取样设备的空间需求,进而减小了模拟舱的体积,节约了成本。
41.(6)本发明所提出的取样作业设备的操作维护方法,自动化程度高,易用性好,同时能够有效减少钛合金、不锈钢以及铝合金三种材料在海水环境下作业后出现的腐蚀问题,有效减轻了取样作业降低检修和维护的频率。
附图说明
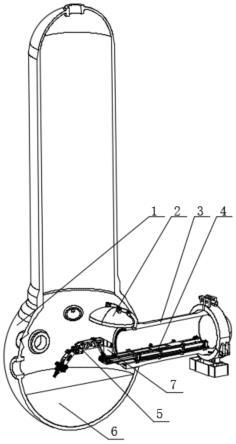
42.图1为本发明的结构示意图。
43.图2为本发明平移机构的结构示意图。
44.图3为图2中a部的局部放大图。
45.图4为本发明回转关节的结构示意图。
46.图5为本发明作业机构的部分示意图。
47.图6为本发明作业机构另一视角的部分示意图。
48.图7为本发明作业机构头部的结构示意图。
49.图8为本发明作业机构存放状态时的结构示意图。
50.图9为本发明作业机构出舱准备时的结构示意图。
51.图10为本发明作业机构不同角度取样时的状态图(一)。
52.图11为本发明作业机构不同角度取样时的状态图(二)。
53.图12为本发明作业机构作业面积覆盖示意图(一)。
54.图13为本发明作业机构作业面积覆盖示意图(二)。
55.图14为本发明维护流程图。
56.其中:1、试验舱;2、舱门;3、干湿转换舱;4、平移机构;5、作业机构;6、取样对象;7、基座回转关节;
57.401、平移基座;402、导向轨道;403、导向减摩板;404、安装导向板;405、平移水缸;406、底座;407、减摩块;
58.501、一号避障声呐;502、副臂;503、连杆;504、主臂;505、二号避障声呐;506、主臂水缸;507、副臂转动水缸;508、三角板;509、腕部摆动缸;510、腕部基座;511、伸缩减摩板;512、伸缩导向架;513、水下照明灯;514、水下摄像机;515、交叉爪;516、交叉爪开合水缸;517、手爪摆动缸;518、手爪转动基座;519、腕部传动轴;
59.701、回转基座;702、上减摩环;703、传动轴;704、联轴器;705、固定基座;706、下减摩环;708、回转摆动缸。
具体实施方式
60.下面结合附图,说明本发明的具体实施方式。
61.如图1-图14所示,本实施例的高压模拟舱环境下水液压驱动的取样装备,包括试验舱1,试验舱1内有取样对象6,试验舱1的一侧设置有干湿转换舱3,干湿转换舱3的前部和后部均设置有舱门2,干湿转换舱3的内部安装有平移机构4,平移机构4的头部通过基座回转关节7安装有作业机构5;
62.平移机构4的结构为:包括与干湿转换舱3固定的底座406,底座406上设置有两块安装导向板404,每块安装导向板404上设置有两块导向减摩板403,安装导向板404上配合安装有平移水缸405,平移水缸405的活塞杆与平移基座401通过球铰铰接,还包括导向轨道402,导向轨道402与平移水缸405的缸体连接,平移基座401沿导向轨道402滑动;
63.作业机构5包括机械臂和机械手爪两大部分,机械臂设置有五个自由度,机械臂主要包括基座回转关节7,基座回转关节7外部连接主臂俯仰关节、副臂转动关节、副臂伸缩关节以及腕部转动关节,机械手爪设置有二个自由度,机械手爪包括手爪摆动关节以及手爪夹持关节。
64.平移水缸405为水介质驱动的直线缸,共设置有两组。
65.平移水缸405的缸体法兰底部开设有矩形凹槽,与安装导向板404上的凸槽进行配合,实现导向以及相对滑动,平移水缸405的缸体法兰底面与导向减摩板403接触,导向减摩板403为高分子减摩材料,在无润滑或水润滑条件下,实现与平移水缸405底面的低摩擦系数。
66.平移基座401的两侧设置有减摩块407。
67.减摩块407设置于平移基座401与导向轨道402之间,用于在无润滑或水润滑条件下,平移水缸405沿着导向轨道402实现低摩擦滑动。
68.基座回转关节7的结构为:包括平移基座401,平移基座401底部设置有回转摆动缸708,平移基座401的上部固定有空心圆柱体结构的固定基座705,固定基座705的外部通过上减摩环702和下减摩环706安装回转基座701,回转摆动缸708的输出端通过联轴器704连接传动轴703,传动轴703伸出固定基座705和回转基座701的顶部。
69.回转摆动缸708位齿轮齿条式摆动缸。
70.主臂俯仰关节实现作业机构5的俯仰运动,基座回转关节7的外部铰接主臂水缸506,主臂水缸506与主臂504连接,主臂504的头部安装有副臂转动关节,副臂转动关节用于实现作业机构5副臂502的转动工作,主臂504底部设置有三角板508,三角板508与主臂504中部之间安装副臂转动水缸507,副臂502的外部还通过连杆503与三角板508连接;副臂伸缩关节包括副臂伸缩水缸、伸缩导向架512、伸缩减摩板511、腕部基座510,副臂伸缩水缸活塞杆与腕部基座510固定连接,伸缩减摩板511固定在伸缩导向架512的导向槽内,伸缩导向架512前端与腕部基座510固定连接,同时沿着副臂进行滑动,副臂伸缩关节通过副臂伸缩水缸活塞杆的伸缩带动腕部基座510以及伸缩导向架512沿着副臂502进行平移运动,实现作业机构5前端关节的伸缩运动;腕部转动关节由齿轮齿条式水液压摆动缸实现180
°
的转动,腕部转动关节包括腕部摆动缸509、腕部基座510、腕部传动轴519以及手爪转动基座518,腕部摆动缸509固定于腕部基座510上,输出轴与腕部传动轴519相连接,腕部传动轴519与手爪转动基座518通过键连接实现传动,进而实现腕部摆动缸509带动手爪转动基座518绕着腕部基座510转动,在腕部基座510上布置有一组水下摄像机514和水下照明灯513。
71.伸缩导向架512顶部安装有一号避障声呐501,主臂504的顶部安装有二号避障声呐505。
72.机械手爪包括手爪摆动缸517、交叉爪开合水缸516以及交叉爪515,手爪摆动缸517为齿轮齿条式摆动缸,驱动介质为水,手爪摆动缸517直接驱动开合爪实现摆动功能,手爪夹持由交叉爪开合水缸516带动连杆机构实现交叉爪515的张开和闭合。
73.本实施例的高压模拟舱环境下水液压驱动的取样装备及维护方法,包括如下操作步骤:
74.第一步:检查工作,对取样装备的各关节进行自检,确认各关节功能是否正常,摄像机及照明灯是否正常,若出现功能异常,打开干湿转换舱3尾部的舱门2,将取样装备平移出舱,进行检修;
75.第二步:检修完毕后,复位;
76.第三步:将干湿转换舱3内注入海水并排气,直至与试验舱1的压力达到平衡;
77.第四步:打开干湿转换舱3前部的舱门2;
78.第五步:平移机构4启动工作,将作业机构5沿轨道推出至试验舱1内;
79.第六步:根据所需要执行的作业任务,操作作业机构5的机械手抓取对应的作业工具,准备开展作业;
80.第七步:操作取样装备进行相应的作业任务,通过手动操作或自动控制的方式进行作业,在作业过程中,当一号避障声呐501触发报警时,作业机构5将停止向报警方向运
动,直至操作至安全位置时,报警取消;
81.第八步:当完成作业任务后,可通过手动或自动的方式控制使机构回原位,并将手爪夹持的工具以及样品放回;
82.第九步:关节归零,作业机构5完全折叠至放置状态,平移机构4工作,带动设备进舱,干湿转换舱3前部的舱门2关闭;
83.第十步:对干湿转换仓进行卸压,排空海水;
84.第十一步:当完成排水后,重新将干湿转换舱3注满淡水,并静置三天,目的在于稀释取样装备上的残留海水,降低腐蚀;
85.第十二步:排空淡水,并打开干湿转换舱3尾部的舱门2,向内部进行吹风,目的在于风干取样装备上的淡水;
86.第十三步:关闭干湿转换舱3尾部舱门2,舱内充满氮气,完成整个操作维护,等待下次工作。
87.本发明所述的取样对象6可以是沉积物、水体以及舱内生物等。
88.本发明的作业对象可以是舱内一些设备的检查检修等。
89.本发明所述的高压模拟舱环境下水液压驱动的取样装备的具体结构和功能如下:
90.主要包括平移机构4、作业机构5。
91.(一)平移机构4:
92.平移机构4作为承载平台,主要包括平移水缸405、导向轨道402、减摩块407、平移基座401、底座406、安装导向板404以及导向减摩板403,如图2所示,底座406与干湿转换舱3固连,在底座406上设置有两块安装导向板404,每块安装导向板404上设置有两块导向减摩板403,平移水缸405为水介质驱动的直线缸,共设置有两组,平移水缸405缸体法兰底部开设有矩形凹槽,可与安装导向板404上的凸槽进行配合,实现导向以及相对滑动,平移水缸405缸体法兰底面与导向减摩板403接触,导向减摩板403为高分子减摩材料,能够在无润滑或水润滑条件下,实现与平移水缸405底面的低摩擦系数;平移水缸405活塞杆与平移基座401通过球铰铰接,导向轨道402共设置有两组,分别与平移水缸405缸体固连,减摩块407为高分子减摩材料,共设置有两组,与平移基座401固连,使得在无润滑或水润滑条件下,平移基座401沿着导向轨道402进行滑动时的摩擦阻力很小。
93.平移机构4通过平移水缸405活塞杆的伸缩带动平移基座401沿着导向轨道402进行平移运动,进而实现作业机构5的进出舱以及位置调整,减摩块407的存在使得在无润滑或水润滑的状态下,平移基座401与导向轨道402的滑动阻力依然很小,避免了平移过程中的卡死现象,有效降低了平移水缸405的负载和功率。
94.由于取样作业设备放置于干湿转换舱3中,当需要维修时,由于试验舱1内为高压环境,且干湿转换舱3内空间狭小,内部直径1.2米,人员难以进入,给取样作业系统的安装和维护带来很大困难。而安装导向板404以及导向减摩板403的设置能够使得取样作业系统的安装维护变得更加便捷,具体实现方式为:底座406与干湿转换舱3实现固定连接,在安装时,先将安装导向板404固定在底座406上,调整好直线度与平行度,接着完成平移机构4以及作业机构5的装配,将平移水缸405缸体底部的矩形凹槽与安装导向板404上的凸槽配合后,直接从干湿转换舱3尾部平推进去后,对平移水缸405尾部进行固定即可完成安装。当需要维修时,打开干湿转换舱3尾部舱门2,解除平移水缸405尾部与底座406的固定,即可实现
取样作业设备整体沿安装导向板404平移出舱。
95.(二)作业机构5:
96.作业机构5主要分为机械臂以及机械手爪两部分,其中机械臂有五个自由度,包括基座回转关节7、主臂俯仰关节、副臂转动关节、副臂伸缩关节以及腕部转动关节,机械手爪有二个自由度,包括手爪摆动关节以及手爪夹持关节。
97.机械臂部分:
98.a)基座回转关节7
99.基座回转关节7用于实现作业机构5的回转运动,主要由回转摆动缸708、回转基座701、固定基座705、传动轴703、联轴器704、上减摩环702以及下减摩环706等组成,如图4所示。其中回转摆动缸708为齿轮齿条式摆动缸,驱动介质为水,内部无油,通过水润滑,能实现360
°
的全回转功能,水液压摆动缸与平移基座401固定,水液压摆动缸输出轴通过联轴器704与传动轴703相连,传动轴703与回转基座701配合实现传动,固定基座705与平移基座401固定,在固定基座705和回转基座701之间设置有上减摩环702以及下减摩环706,减摩环为高分子减摩材料,能够在无润滑或水润滑条件下,实现低摩擦系数,同时,由于作业机构5整体展开后存在较大的倾覆力矩,且减摩环为承载件,本发明中上减摩环702和下减摩环706之间的间距较大,可有效降低减摩环上所承受的支承力,有效降低了摩擦阻力;避免了在无润滑或水润滑条件下在回转过程中的卡死现象,有效降低了回转摆动缸708的负载和功率。
100.b)主臂俯仰关节
101.主臂俯仰关节用于实现作业机构5的俯仰运动,俯仰关节主要由俯仰水缸、主臂组成,如图5所示。俯仰水缸为水介质驱动的直线缸,俯仰水缸缸体与回转基座701铰接,俯仰水缸活塞杆与主臂铰接,主臂俯仰关节通过俯仰水缸活塞杆的伸缩带动主臂实现俯仰运动。
102.在主臂504上设置有二号避障声呐505,用于监测主臂结构与试验舱1或其他设备的距离,当出现可能的碰撞时,能够在操作界面实现示警功能。
103.c)副臂转动关节
104.副臂转动关节用于实现作业机构5副臂502的转动,由于作业机构5完全伸展状态下力臂很长,产生的倾覆力矩较大,目前由水介质驱动的摆动缸或者马达在技术上难以满足副臂转动的扭矩需求,故采用连杆机构将直线运动转变为转动。副臂转动关节主要由副臂转动水缸507、三角板508、连杆503、副臂502等组成,如图5所示。副臂水缸缸体与主臂铰接,副臂水缸活塞杆两端分别与两块三角板508铰接,三角板508另外两个转动孔分别与主臂504以及连杆503铰接,连杆503的另一端则与副臂502铰接,同时主臂504与副臂502也通过铰接的形式连接。
105.副臂转动关节通过副臂转动水缸507活塞杆的伸缩带动三角板508绕主臂转动,三角板508的另一端带动连杆503转动,连杆503的另一端驱动副臂502绕主臂转动,实现直线运动变转动。副臂502转动角度大于180
°
,覆盖面积大,极大的提升了取样设备的作业范围,同时副臂能够完全折叠至与主臂平行的位置,有效节约了放置空间。
106.d)副臂伸缩关节
107.副臂伸缩关节可以进一步增加作业机构5的作业范围,同时能够实现作业机构5的
垂直下插和上拔动作,携带取样器可以实现土体和沉积物的取样,副臂伸缩关节主要由副臂、副臂伸缩水缸、伸缩导向架512、伸缩减摩板511、腕部基座510以及一号避障声呐501等组成,如图6所示,副臂伸缩水缸为水介质驱动的直线缸,副臂伸缩水缸缸体与副臂固定连接,副臂伸缩水缸活塞杆与腕部基座510固定连接,伸缩减摩板511固定在伸缩导向架512导向槽内,伸缩导向架512前端与腕部基座510固定连接,同时沿着副臂进行滑动,副臂伸缩关节通过副臂伸缩水缸活塞杆的伸缩带动腕部基座510以及伸缩导向架512沿着副臂进行平移运动,实现作业机构5前端关节的伸缩运动,伸缩减摩板511的存在使得在无润滑或水润滑的状态下,副臂502与伸缩导向架512的滑动阻力依然很小,避免了伸缩过程中的卡死现象,有效降低了副臂伸缩水缸的负载和功率。
108.在伸缩导向架512上设置有一号避障声呐501,用于监测伸缩运动时作业机构5前端与试验舱1或其他设备的距离,当出现可能的碰撞时,能够在操作界面实现示警功能。
109.e)腕部转动关节
110.腕部转动关节由齿轮齿条式水液压摆动缸实现180
°
的转动功能,如图7所示,主要由腕部摆动缸509、腕部基座510、腕部传动轴519以及手爪转动基座518组成,腕部摆动缸509固定于腕部基座510上,其输出轴与腕部传动轴519相连接,腕部传动轴519与手爪转动基座518通过键连接实现传动,进而实现腕部摆动缸509带动手爪转动基座518绕着腕部基座510转动,在腕部基座510上布置有一组水下摄像机514和水下照明灯513,用于取样作业过程中的在线观测。
111.f)机械手爪
112.机械手爪用于夹持取样器进行取样、抓取生物或者加持工具进行作业等,如图7所示,具备手爪摆动以及手爪夹持的功能,机械手爪由手爪摆动缸517、交叉爪开合水缸516以及交叉爪515等组成,手爪摆动缸517为齿轮齿条式摆动缸,驱动介质为水,手爪摆动缸517直接驱动开合爪实现摆动功能,手爪夹持由交叉爪开合水缸516带动连杆机构实现交叉爪515的张开和闭合。在手爪转动基座518上布置有一组水下摄像机514和水下照明灯513,用于取样作业过程中的在线观测。
113.(三)设备操作维护方法:
114.取样作业设备操作维护方法包括如下操作步骤:
115.第一步:取样作业设备各关节自检,确认各关节功能是否正常,摄像机及照明灯是否正常,若出现功能异常,打开干湿转换舱3尾部的舱门2,将取样作业设备平移出舱,进行检修;
116.第二步:干湿转换舱3内进行注海水,排气,直至与试验舱1的压力达到平衡;
117.第三步:打开干湿转换舱3前部舱门2,平移机构4启动,将作业机构5沿轨道推出至试验舱1内;
118.第四步:根据所需要执行的作业任务,操作作业机构5机械手抓取对应的作业工具,准备开展作业;
119.第五步:操作取样作业设备进行相应的作业任务,可通过手动操作或自动控制的方式进行作业,在作业过程中,当一号避障声呐501触发报警时,作业机构5将停止向报警方向运动,直至操作至安全位置时,报警取消;
120.第六步:当完成作业任务后,可通过手动或自动的方式控制去也机构回原位,并将
手爪夹持的工具以及样品放回;
121.第七步:关节归零,作业机构5完全折叠至放置状态,平移机构4工作,带动设备进舱,干湿转换舱3前部舱关闭;
122.第八步:对干湿转换仓进行卸压,排空海水;
123.第九步:当完成排水后,重新将干湿转换舱3注满淡水,并静置三天,目的在于稀释取样作业设备上的残留海水,降低腐蚀;
124.第十步:排空淡水,并打开干湿转换舱3尾部的舱门2,向内部进行吹风,主要目的在于风干取样作业设备上的淡水;
125.第十一布:关闭干湿转换舱3尾部舱门2,舱内充满氮气,完成整个操作维护,等待下次工作。
126.由于作业设备结构部分材料为钛合金、不锈钢以及铝合金,试验舱1内为海水,取样作业设备容易出现电位腐蚀以及电化学腐蚀,通过维护过程中淡水浸泡、吹风干燥以及充满氮气的方式,能够有效减轻取样作业设备的腐蚀情况,降低检修和维护的频率。
127.整个操作维护流程中,步骤一至四为自动控制,步骤五在进行定点取样作业时,也能够实现自动控制,步骤七至十一为为自动控制,整个操作维护过程自动化程度高,便于操作。
128.以上描述是对本发明的解释,不是对发明的限定,本发明所限定的范围参见权利要求,在本发明的保护范围之内,可以作任何形式的修改。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1