一种基于机器视觉的带式输送机运输流量的确定方法与流程
1.本发明涉及一种基于机器视觉的带式输送机运输流量的确定方法,适用于矿山、水泥、粮食等行业物流运输技术领域。
背景技术:
2.在矿山、水泥和粮食等行业,需要使用带式输送机作为水平和垂直方向上的物流运输。物流运输的物料流量通常是通过皮带秤加带速计组合后,利用算法推导出单位距离内的货物重量,即物料流量,其中常规带速计采用接触轮结构紧贴在上皮带的下带面上,作为直接影响测量精度的仪器,会受到打滑、皮带背面积灰、自身机械故障等因素影响,造成测量失真。
3.因此,亟需提供一种非接触式的,利用机器视觉方式测量带式输送机运输流量的确定方法。
技术实现要素:
4.本发明的目的在于,针对现有技术中存在的不足,提供一种基于机器视觉的带式输送机运输流量的确定方法。
5.为此,本发明的上述目的通过如下技术方案实现:
6.一种基于机器视觉的带式输送机运输流量的确定方法,其特征在于:所述基于机器视觉的带式输送机运输流量的确定方法包括如下步骤:
7.s1、在带式输送机的输送带正上方设置图像采集装置,所述图像采集装置朝向带式输送机的输送带上的物料;
8.s2、启动带式输送机输送物料,控制图像采集装置进行延时拍照并持续曝光;
9.s3、在所获取的曝光图像上通过轮廓分割法获取所运输物料的外包络线与带式输送机的输送带边缘的交点的运行轨迹的条状影像外轮廓,并通过图像标定获得物料外包络线在输送带上的摊铺宽度b,单位为m;
10.s4、获取输送机的运行速度v,单位为m/s;
11.s5、获取输送机中间辊长度l,单位为m;输送机两侧托辊的上扬角α;
12.s6、根据输送机的运行速度v以及所运输的物料性质,得到物料运行堆积角β:
13.当物料为块石时,物料运行堆积角β:β=13.97ln(v)+33.754
14.当物料为干砂时,物料运行堆积角β:β=17.04ln(v)+27.487
15.当物料为湿砂时,物料运行堆积角β:β=19.91ln(v)+39.169
16.s7、获取输送带上物料的截面积s为:
[0017][0018]
上式中,b为物料外包络线在输送带上的摊铺宽度,单位为m;l为输送机中间辊长度,单位为m;α为输送机两侧托辊的上扬角;β为物料运行堆积角;
[0019]
s8、获取输送带上物料的体积流量v为:
[0020]
v=asvk
[0021]
上式中,v为物料的体积流量,单位为m3/s;a为流量修正系数,根据现场较准试验确定;s为物料的截面积,单位为m2;v为输送机的运行速度,单位为m/s;k为倾斜折减系数,根据被测量带式输送机爬坡角度确定;
[0022]
s9、获取输送带上物料的重量流量q为:
[0023]
q=3.6vρ
[0024]
式中:ρ为物料的密度,单位为g/cm3。
[0025]
在采用上述技术方案的同时,本发明还可以采用或者组合采用如下技术方案:
[0026]
作为本发明的一种优选技术方案:步骤s2中,持续曝光时间根据现场环境设置为5~10s。
[0027]
作为本发明的一种优选技术方案:步骤s4中,输送机的运行速度v的获取方法包括如下步骤:
[0028]
s401、在带式输送机上输送带外缘沿直线方向等距贴定位标记点,标记点的颜色区别于输送带带面和物料的颜色;在带式输送机的输送带正上方设置图像采集装置;
[0029]
s402、测量和记录图像采集装置的镜头到定位标记点的垂直高差h;调整并记录图像采集装置镜头视角γ,使镜头视野内能出现至少3个完整的标记点;设置图像采集装置的快门时间s;根据环境亮度,设置适宜的光圈参数,确保图像上能清晰看到所述标记点;
[0030]
s403、启动带式输送机输送物料,控制图像采集装置进行图像采集;
[0031]
s404、利用计算机图像处理措施,获取画面内完整拖影的长度ly;
[0032]
s405、计算拖影长度和快门时间的比值,即为计算速度vc,测量的输送机的运行速度vm和计算速度的修正系数a,vm=a
·
vc。
[0033]
作为本发明的一种优选技术方案:利用测量和记录获得的垂直高差h和镜头视角γ,按下式计算得到图像采集装置的可视范围的实际长度l:
[0034][0035]
标记点的间距宜小于l/3,同时大于30cm;
[0036]
在计算机内可方便获得图像整张画面宽度像素数量b,以及画面中所有完整拖影的长度方向像素数量b1、b2、b3
…
bn,n为图像中完整拖影的数量;
[0037]
在快门时间s内标记点移动平均距离ly为公式:
[0038][0039]
上式中,b0为标记点长度;
[0040]
计算速度vc为:
[0041]vc
=ly/s
[0042]
采用传统方式测量带式输送机运输实际速度v和对应的计算速度vc,通过统计分析获得修正系数a。
[0043]
作为本发明的一种优选技术方案:步骤s402中,快门时间采用1/15或1/30;调整镜
头视角γ,使图像采集装置的视野内至少有3个完整的标记点。
[0044]
作为本发明的一种优选技术方案:利用图像中的像素点数量和实际长度比值,换算得到标记点平移距离,并考虑计算精确性,对画面内所有标记点拖影采用平均值参与后续计算。
[0045]
作为本发明的一种优选技术方案:步骤s8中,k的取值为1~0.8。
[0046]
本发明提供一种基于机器视觉的带式输送机运输流量的确定方法,与现有技术相比,具有如下有益效果:本发明所提供的方法可以采用非接触方式,获得带式输送机运输流量(包括体积流量和重量流量),为带式输送机运输测量提供依据,同时本发明仅需额外增加图像采集装置,不需要对皮带机做任何改造,适用于各类带式输送机。
附图说明
[0047]
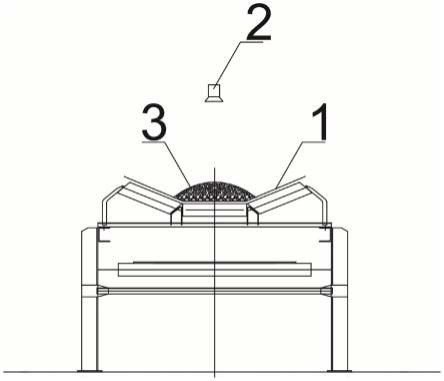
图1为本发明所提供的图像采集装置的布置图示。
[0048]
图2为带式输送机的输送带上物料的截面图示。
[0049]
图3为定位标记点的布置图示。
具体实施方式
[0050]
参照附图和具体实施例对本发明作进一步详细地描述。
[0051]
一种基于机器视觉的带式输送机运输流量的确定方法,包括如下步骤:
[0052]
s1、在带式输送机的输送带1正上方设置图像采集装置2,图像采集装置2朝向带式输送机的输送带1上的物料3;
[0053]
s2、启动带式输送机输送物料3,控制图像采集装置2进行延时拍照并持续曝光,持续曝光时间根据现场环境设置为5~10s;
[0054]
s3、在所获取的曝光图像上通过轮廓分割法获取所运输物料3的外包络线31与带式输送机的输送带1边缘的交点的运行轨迹的条状影像外轮廓,并通过图像标定获得物料外包络线31在输送带上的摊铺宽度b,单位为m;
[0055]
s4、获取输送机的运行速度v,单位为m/s;
[0056]
s5、获取输送机中间辊长度l,单位为m;输送机两侧托辊的上扬角α;
[0057]
s6、根据输送机的运行速度v以及所运输的物料性质,得到物料运行堆积角β:
[0058]
当物料为块石时,物料运行堆积角β:β=13.97ln(v)+33.754
[0059]
当物料为干砂时,物料运行堆积角β:β=17.04ln(v)+27.487
[0060]
当物料为湿砂时,物料运行堆积角β:β=19.91ln(v)+39.169
[0061]
s7、获取输送带上物料的截面积s为:
[0062][0063]
上式中,b为物料外包络线在输送带上的摊铺宽度,单位为m;l为输送机中间辊长度,单位为m;α为输送机两侧托辊的上扬角;β为物料运行堆积角;
[0064]
s8、获取输送带上物料的体积流量v为:
[0065]
v=asvk
[0066]
上式中,v为物料的体积流量,单位为m3/s;a为流量修正系数,根据现场较准试验
确定;s为物料的截面积,单位为m2;v为输送机的运行速度,单位为m/s;k为倾斜折减系数,根据被测量带式输送机爬坡角度确定,k的取值为1~0.8;
[0067]
s9、获取输送带上物料的重量流量q为:
[0068]
q=3.6vρ
[0069]
式中:ρ为物料的密度,单位为g/cm3。
[0070]
步骤s4中,输送机的运行速度v的获取方法包括如下步骤:
[0071]
s401、在带式输送机上输送带外缘沿直线方向等距贴定位标记点4,标记点4的颜色区别于输送带带面和物料的颜色;在带式输送机的输送带正上方设置图像采集装置;标记点4大小宜采用1cm*1cm的正方形,采用白色、黄色或其他区别于带面和物料的颜色,使用粘贴的方式固定。
[0072]
s402、测量和记录图像采集装置的镜头到定位标记点的垂直高差h;调整并记录图像采集装置镜头视角γ,使镜头视野内能出现至少3个完整的标记点;设置图像采集装置的快门时间s;根据环境亮度,设置适宜的光圈参数,确保图像上能清晰看到所述标记点;快门时间采用1/15或1/30;调整镜头视角γ,使图像采集装置的视野内即一帧画面中至少有3个完整的标记点;
[0073]
s403、启动带式输送机输送物料,控制图像采集装置进行图像采集,由于快门时间较长,会在画面中出现快门曝光时间内在带式输送机带面上标记点的拖影;
[0074]
s404、利用计算机图像处理措施,获取画面内完整拖影的长度(记为ly,即标记点的运动距离);
[0075]
s405、计算拖影长度和快门时间的比值,即为计算速度vc,测量的输送机的运行速度vm和计算速度的修正系数a,vm=a
·
vc。
[0076]
利用测量和记录获得的垂直高差h和镜头视角γ,按下式计算得到图像采集装置的可视范围的实际长度l:
[0077][0078]
标记点的间距即标记点的中心距与标记点的长度差值,宜小于l/3,同时大于30cm;
[0079]
在计算机内可方便获得图像整张画面宽度像素数量b,以及一帧画面中所有完整拖影的长度方向像素数量b1、b2、b3
…
bn,n为图像中完整拖影的数量;
[0080]
在快门时间s内标记点移动平均距离ly为公式:
[0081][0082]
上式中,b0为标记点长度;
[0083]
计算速度vc为:
[0084]vc
=ly/s
[0085]
采用传统方式测量带式输送机运输实际速度v和对应的计算速度vc,通过统计分析获得修正系数a。
[0086]
利用图像中的像素点数量和实际长度比值,换算得到标记点平移距离,并考虑计
算精确性,对画面内所有标记点拖影采用平均值参与后续计算。
[0087]
上述具体实施方式用来解释说明本发明,仅为本发明的优选实施例,而不是对本发明进行限制,在本发明的精神和权利要求的保护范围内,对本发明做出的任何修改、等同替换、改进等,都落入本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1