一种基于改进蚁群算法的全局规划路径方法与流程
1.本发明涉及自主导航技术领域,特别是涉及自主导航技术的全局规划路径方法技术。
背景技术:
2.由于近几年我国仓储物流行业的迅速发展以及人力成本的提高,传统的仓储物流运输方式越来越不能够适应物流仓储的需求,因此随着高科技的发展,智能仓储物流在很多领域仓储开始推广应用。自动导引车(automated guided vehicle,agv)是一种无人驾驶的运输车辆,agv工作稳定可靠,可以大大提高工作效率,节省人力成本,将人们从某些危险的工作环境中解放出来,在智能仓储物流运输中扮演着越来越重要的角色,因此全局环境的路径规划对agv导航十分重要。
3.现有的路径规划算法主要有可视图法、拓扑法、人工势场法,具有启发式算法特点的主要有神经网络、粒子群、遗传算法和蚁群算法等。人工势场法虽然实现简单,但及其陷入局部极小值;遗传算法具有很好的全局求解能力,但运算的效率不高;蚁群优化算法是一种基于群体智能的元启发式算法,它首次成果被应用于解决旅行商问题,渐渐吸引众多专家学者的关注,并对蚁群算法进行相关改进,蚁群算法以其高效的自组织性和较强的鲁棒性被广泛应用于解决各种优化问题,路径规划就是其中之一,相对于遗传算法效率高,但是对于复杂的环境,也容易出现局部极值,收敛速度慢以及不稳定等问题。
技术实现要素:
4.本发明的目的在于提供一种基于改进蚁群算法的全局规划路径方法,该方法考虑到启发函数、状态转移概率以及信息素更新规则对路径规划性能的影响,以提高对蚁群算法的收敛效率以及稳定性,可生成一条最优无碰撞路径。
5.为实现上述目的,本发明的技术方案是:一种基于改进蚁群算法的全局规划路径方法,其特征在于,全局规划路径方法步骤包括,
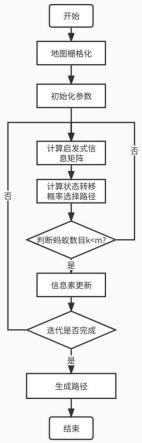
6.步骤1、对工作环境地图进行栅格化建模;
7.步骤2、采用蚁群算法寻找最短路径,其包含步骤2.1、初始化参数,初始化参数,迭代次数记为k,蚂蚁数记为m,最大信息素指导参数记为alphamax,最小信息素指导参数记为alphamin,最大启发函数指导参数记为betamax,最小启发函数指导参数记为betamin,信息素挥发因子记为ρ,信息素强度系数记为q,信息素偏差调节因子记为c;步骤2.2、开始进行迭代,搜索路径,将起始点加入禁忌表中,根据轮盘赌算法选择下一节点,将该节点添加至禁忌表中;
8.步骤3、当前蚂蚁到达终点时,采用激励惩罚机制对当前蚂蚁所走路径的信息素进行更新;
9.步骤4、判断当前迭代的蚂蚁是否全部到达终点,若没有返回步骤2.2,若有则继续进行;
10.步骤5、每轮迭代结束后采用信息素偏差放大更新当前迭代所有蚂蚁的信息素;
11.步骤6、判断迭代是否完成,若未完成返回步骤2.2,若完成继续进行;
12.步骤7、根据记录的全局最小路径生成路径。
13.所述步骤1建模方法过程是将环境地图抽象为m
×
n的栅格环境,每个网格对应一个唯一的网格编号记为i,i与所在栅格坐标的对应关系为其中x表示栅格坐标中x轴坐标值,y表示栅格坐标中y轴坐标值,m表示每一行网格数目,n表示每一列网格数目,mod为求余运算,ceil为向上取整,通过矩阵来生成栅格图,0表示可以通过,1表示有障碍物。
14.所述步骤2.2中轮盘赌算法公式为,
[0015][0016]
其中,为状态转移概率,α为信息素知道因子,β为启发函数知道因子,τ
ij
(t)为路径i、j的信息素浓度,η
ij
(t)为启发函数,
[0017]
在传统蚁群算法中,设蚂蚁总数为m只,设定在t时刻,蚂蚁k从当前i接电移动到下一j节点的可能性由状态转移概率决定,
[0018]
其中,l
jg
为节点j到目标节点的距离,l
ig
为节点i到目标节点的距离,α和β因子在本发明中采用自适应的计算方式计算,计算方法为,
[0019][0020][0021]
其中nc为当前迭代数,n是一个常数,当nc<n时α和β去最小值,此时有利于增加群算法的全局性,随着迭代,此时的增高α和β不断增大,通过此做法加快算法收敛。
[0022]
所述步骤3中信息素进行更新的更新机制计算公式为,
[0023][0024]
其中,ρ为信息素挥发因子,q为信息素强度因子,plm为当前蚂蚁到终点的路径长度,plbs为当前迭代最短路径长度,plws为当前迭代最长路径长度,c是常数,k为当前迭代数,k为总迭代次数,这里引入k和k是为了在迭代前期增加解的全局性,防止出现局部极值,
在后期加快收敛。
[0025]
所述步骤5中信息素浓度ε
ij
(t)计算方式采取信息素浓度偏差放大策略,改进后的信息素更新规则定义公式为,
[0026]
τ
ij
(t+1)=(1-ρ)τ
ij
(t)+δτ
ij
(t)
[0027][0028]
其中,ρ为信息素挥发因子,q为信息素强度因子,plm为当前蚂蚁到终点的路径长度,plbs为当前迭代最短路径长度,plws为当前迭代最长路径长度,根据上述公式更新每轮迭代的信息素浓度。
[0029]
通过采用上述技术方案,本发明的有益效果是:1、能够同时考虑路径长度、路径平滑度和路径安全性多个性能指标;2、对启发函数进行改进,在启发函数中,引入自适应调整信息素调节因子α和启发函数调节因子β,为动态方式处理,对处于不同迭代的蚂蚁采用不同的启发函数,迭代次数越大,启发函数值越大,在保证全局性的同时能够有效避免算法陷入局部极值,以及在后期加快收敛;3、在信息更新过程中采用信息素偏差放大策略以及激励惩罚机制,偏差放大策略的对象是,将每一代每一只蚂蚁与最差路径和最好路径和的一半作比较,大于该数值的路径进行信息素放大,小于的减小该路径的信息素,该策略也是为了达到能够加快算法的收敛速度。该方法考虑到启发函数、状态转移概率以及信息素更新规则对路径规划性能的影响,以提高对蚁群算法的收敛效率以及稳定性,能够为agv生成一条最优无碰撞路径。
附图说明
[0030]
图1是本发明涉及的一种基于改进蚁群算法的全局规划路径方法的流程图。
[0031]
图2是本发明涉及的一种基于改进蚁群算法的全局规划路径方法的栅格化地图示例图。
[0032]
图3是传统蚁群算法的机器人运动轨迹图。
[0033]
图4是传统蚁群算法的收敛曲线图。
[0034]
图5是本发明的涉及的一种基于改进蚁群算法的全局规划路径方法的机器人运动轨迹图。
[0035]
图6是本发明的涉及的一种基于改进蚁群算法的全局规划路径方法的收敛曲线图。
具体实施方式
[0036]
为了进一步解释本发明的技术方案,下面通过具体实施例来对本发明进行详细阐述。
[0037]
一种基于改进蚁群算法的全局规划路径方法,如图1所示,本实施例以自动导引车(agv)为例,全局规划路径方法步骤包括,
[0038]
步骤1、对工作环境地图进行栅格化建模;采用栅格法对avg实际工作环境地图进
行建模,建模方法过程是将环境地图抽象为m
×
n的栅格环境,单元格长度为1cm,每个网格对应一个唯一的网格编号(序号)记为i,i与所在栅格坐标的对应关系为其中x表示栅格坐标中x轴坐标值,y表示栅格坐标中y轴坐标值,m表示每一行网格数目,n表示每一列网格数目,mod为求余运算,ceil为向上取整,如图2为agv环境地图模型示意图,通过矩阵来生成栅格图,0表示可以通过,1表示有障碍物。
[0039]
步骤2、采用改进后的蚁群算法寻找最短路径,其方法过程包括,
[0040]
步骤2.1、初始化参数,迭代次数记为k,蚂蚁数记为m,最大信息素指导参数记为alphamax,最小信息素指导参数记为alphamin,最大启发函数指导参数记为betamax,最小启发函数指导参数记为betamin,信息素挥发因子记为ρ,信息素强度系数记为q,信息素偏差调节因子记为c。在本实例中k=100,m=50,alρhamax=2,alphamin=1,betamax=9,betamin=7,ρ=0.3,q=1,c=100。
[0041]
步骤2.2、开始进行迭代,搜索路径,将起始点加入禁忌表中,根据轮盘赌算法公式选择下一节点,将该节点添加至禁忌表中,其中,α为信息素知道因子,β为启发函数知道因子,τ
ij
(t)为路径ij的信息素浓度,η
ij
(t)为启发函数,
[0042]
状态转移概率同样按照公式计算,在传统蚁群算法中,设蚂蚁总数为m只,设定在t时刻,蚂蚁k从当前i接电移动到下一j节点的可能性由如下的状态转移概率决定;在本发明中对α、β、τ
ij
(t)、η
ij
(t)这四个参数都有所改进,其中,l
jg
为节点j到目标节点的距离,l
ig
为节点i到目标节点的距离,α和β因子在本发明中采用自适应的计算方式计算,计算方法为,
[0043][0044][0045]
其中nc为当前迭代数,n是一个常数,当nc<n时α和β去最小值,此时有利于增加群算法的全局性,随着迭代,此时的增高α和β不断增大,通过此做法加快算法收敛;
[0046]
步骤3、当前蚂蚁到达终点时,采用激励惩罚机制对当前蚂蚁所走路径的信息素进
行更新,更新机制计算公式,
[0047][0048]
其中,ρ为信息素挥发因子,q为信息素强度因子,plm为当前蚂蚁到终点的路径长度,plbs为当前迭代最短路径长度,plws为当前迭代最长路径长度,c是常数,k为当前迭代数,k为总迭代次数,这里引入k和k是为了在迭代前期增加解的全局性,防止出现局部极值,在后期加快收敛;
[0049]
步骤4、判断当前迭代的蚂蚁是否全部到达终点,若没有返回步骤2.2,若有则继续进行,
[0050]
步骤5、每轮迭代结束后采用信息素偏差放大更新当前迭代所有蚂蚁的信息素,τ
ij
(t)信息素浓度计算方式采取信息素浓度偏差放大策略,改进后的信息素更新规则定义公式为,
[0051]
τ
ij
(t+1)=(1-ρ)τ
ij
(t)+δτ
ij
(t)
[0052][0053]
其中,ρ为信息素挥发因子,q为信息素强度因子,plm为当前蚂蚁到终点的路径长度,plbs为当前迭代最短路径长度,plws为当前迭代最长路径长度,根据上述公式更新每轮迭代的信息素浓度;
[0054]
步骤6、判断迭代是否完成,若未完成返回步骤2.2,若完成继续进行;
[0055]
步骤7、根据记录的全局最小路径生成路径,到此算法结束。
[0056]
为验证上述方法的可行性,将上述基于改进蚁群算法的全局规划路径方法进行模拟仿真,与传统的蚁群算法进行比较,结合图3-图6,可以看出传统的蚁群算法虽然能够得到全局路径的最优解,但是从收敛曲线上可以看出,传统的蚁群算法他的收敛效率不高,对遇到复杂的栅格化地图每次迭代的最短路径波动很大,而且会出现局部极值,对比传统的蚁群算法,本发明改进的蚁群算法能很好的解决这一问题,在迭代20次后,算法就已经收敛完成,得到的最优路径也和传统的蚁群算法一致。仿真实验证明,与其他蚁群算法相比,本发明实现的蚁群算法的收敛速度快,可以同样生成和其他蚁群算法的最短路径,而且稳定性好。
[0057]
上述实施例和图式并非限定本发明的产品形态和式样,任何所属技术领域的普通技术人员对其所做的适当变化或修饰,皆应视为不脱离本发明的专利范畴。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1