基于大数据和定位技术的安全出行路径优化方法及系统
1.本发明属于路径规划和安全防护技术领域,具体涉及一种安全出行路径优化方法及系统。
背景技术:
2.由于男性和女性存在天然差异性,女性从力量、速度等方面存在弱势,因此安全更容易受到威胁,为了提高女性出行的安全性,目前国内市场上已经出现了一些针对女性出行安全的手机求救应用、可穿戴式智能设备、女性防狼用品等发明,可以在侵害事件即将发生时实现迅速报警、求救。但是这种都是被动防御的方式,如果其遇到某些危险情况时这些方式的作用非常有限,如果能从主动防御方面就考虑如何尽量避免危险的发生或者主动预防,则会在很大程度上提高如女性等特殊人群的安全性。但是目前并没有针对特殊人群 (包括女性等群体)的从主动层面就避免危险的方式,例如,现有的路径规划应用都是针对地理信息进行的,还没有针对人群差异性进行规划的方案。
3.现有手机智能地图(如百度地图、高德地图等)已经提供了一些诸如环境质量地图、便民生活地图等主题地图功能,却尚未开发基于女性等特殊人群出行安全考虑的主题地图功能;微信应用也仅出现了一些旨在普及安全知识的小程序,尚未出现基于女性等出行安全考虑的小程序可供用户参考或进行出行路径安全相关信息的实时检索。目前的现有地图并未对安全路径进行相应的规划,也却并未强调女性等角度出行安全的影响因子、可视化图层呈现等要点。
技术实现要素:
4.本发明为了解决现有路径规划方法尚未引入危险因素导致规划路径仍存在安全风险的问题。
5.基于大数据和定位技术的安全出行路径优化方法,包括以下步骤:
6.步骤一:根据用户用户输入的起止点a-》b,调用高德地图api,获取初始若干步行路径,基于返回的高德地图api的results对象中的导航数据,以路口和路径构建图结构g=(v, e),其中v表示路径中对应的节点,e表示节点间的路径;
7.步骤二:基于图结构以及实际环境对应的危险因素信息,采用改进a*算法形成最优路径;
8.所述改进a*算法为改进优先级代价函数的a*算法,所述改进优先级代价函数如下:
9.f(v_t)=χ1g(v_t)+χ2h(v_t)+χ3i(v_t)
10.其中,χ1、χ2、χ3为权重参数,权重χ1+χ2+χ3=1;g(v_t)表示移动代价,具体为从起始点已经行进的距离;h(v_t)表示估算成本,具体为对剩余距离的估计,i(v_t)表示危险测度代价,具体为各危险因素的无量纲化标准值的加权和,即:
11.i(v_t)=∑(γqxq)
12.其中,xq为危险因素的无量纲化标准值,γq为危险因素的无量纲化处理后的标准值对应的权重,∑γq=1;
13.所述的危险因素至少包括公共治安因素p、路径监视因素j、空间场地因素k、安全感知因素m;
14.针对每个危险因素,其无量纲化标准值xq为影响对应危险因素下的危险因子项(每类危险因素下包含若干危险因子项)的归一化值加权和,即:
15.xq=∑(βqx
1ij
)
16.其中,x
1ij
为危险因素中的危险因子项的标准化值,i表示模拟的路径编号,j表示危险因素的编号;βq为危险因素中的危险因子项的权重;
17.危险因素中的危险因子项的标准化值根据与环境安全情况呈正相关或负相关确定,
18.危险因子项与环境安全情况呈正相关的标准化公式如下:
[0019][0020]
危险因子项与环境安全情况呈正相关的标准化公式如下:
[0021][0022]
其中,x
ij
为危险因素中的危险因子项原始数据,x
jmax
为危险因子项j所在的数据组中的最大值,x
jmin
为危险因子项j所在的数据组中的最小值。
[0023]
进一步地,所述公共治安因素p至少包括治安案件危险因子项p1和用户上传的危险因子项p2;其中,
[0024]
治安案件危险因子项p1:运用arcgis软件中核密度工具和缓冲区分析模块,根据收集到的公共治安案件数据模拟绘制犯罪热点地图;基于每条路径公共安全数据,记录该路径及其附近(以arcgis软件缓冲区分析中可覆盖到该路径的公共治安数据为基础)历年内曾发生的治安事件类型和数量n,过程中对不同类型的案件赋予不同的权重值,涉及人身安全的案件的权重为5,危及人身安全的财产案件为3,普通的财产案件为1,按照权重加和得到p1;
[0025]
该因子与环境安全情况呈负相关,采用负相关公式进行标准化处理;
[0026]
用户上传的危险因子项p2:运用arcgis软件中缓冲区分析模块,通过接口采集并标记路径中在生理或心理上会对特殊人群(如女性等群体)的安全造成威胁的位置点,以被标记位置点为中心建立多重缓冲区,并分别对位于不同层次缓冲区的危险因子项的赋值,作为p2;
[0027]
该因子与环境安全情况呈负相关,采用负相关公式进行标准化处理。
[0028]
进一步地,在确定用户上传的危险因子项p2的过程中,若有某个位置点处于不同标记为会对安全造成威胁的位置点的缓冲区内,选择数值最大的缓冲区赋值;如果某个位置点不处于任一标记为会对安全造成威胁的位置点的缓冲区内,设置为0。
[0029]
进一步地,所述路径监视因素j至少包括监控因子j1、安保点辐射因子j2、商铺密度因子j3、邻里守望因子j4、界面围合度因子j5和视线整合度因子j6;
[0030]
监控因子j1:监控摄像头呈点状分布,将摄像头的最大监视范围按照50m,运用
arcgis 软件中空间分析工具中的距离分子中的欧氏距离分析模块进行模拟;
[0031]
该因子与环境安全情况呈正相关,采用正相关公式进行标准化处理;
[0032]
安保点辐射因子j2:安保点呈点状分布,安保点最大辐射范围按照1千米,同样运用 arcgis软件中空间分析工具中的距离分子中的欧氏距离分析模块进行模拟;
[0033]
该因子与环境安全情况呈正相关,采用正相关公式进行标准化处理;
[0034]
商铺密度因子j3:采用所有商铺的开间长度与商铺所在街道总长度进行量化评价,即: j3=所有商铺的开间长度/商铺所在街道总长度;所述的商铺的开间长度是指商铺在街道长度方向上所占据的长度;
[0035]
该因子与环境安全情况呈正相关,采用正相关公式进行标准化处理;
[0036]
邻里守望因子j4:通过租住比进行量化评价,即:j4=面向该路径的住宅的出租数量/面向该路径的住宅总数量;
[0037]
该因子与环境安全情况呈正相关,采用正相关公式进行标准化处理;
[0038]
界面围合度因子j5:运用arcgis软件中现有栅格计算模块实现界面围合度的模拟,将建筑与植被造成的影响按7:3计;按照“建筑==7,植被==3”为每个栅格赋一个基本的围合度数值之后,应用栅格邻域计算工具进行栅格二次计算,将每个栅格周围一定范围内所有栅格的围合度数值的平均值作为该栅格的最终围合度值;
[0039]
该因子与环境安全情况呈正相关,采用正相关公式进行标准化处理;
[0040]
视线整合度j6:引入空间句法中对空间视线的测度方式,运用depthmap软件视线分析模块实现视线整合度的模拟,得到各路径的视线整合度值;
[0041]
该因子与环境安全情况呈正相关,采用正相关公式进行标准化处理。
[0042]
进一步地,所述空间场地因素k至少包括路径集成度因子k1和路径穿行度因子k2;
[0043]
路径集成度因子k1:引入空间句法中对空间整合性的测度方式,运用depthmapx软件集成度分析模块实现对路径集成度的模拟,得到各路径的集成度值;该因子与环境安全情况呈正相关,采用正相关公式进行标准化处理;
[0044]
路径穿行度因子k2:引入空间句法中对空间选择性的测度方式,运用depthmapx软件空间穿行度分析模块实现对路径穿行度的模拟,得到各路径的穿行度值;
[0045]
该因子与环境安全情况呈正相关,采用正相关公式进行标准化处理。
[0046]
进一步地,所述安全感知因素m至少包括环境破败因子m1、光照强度因子m2、人口流密度量因子m3;
[0047]
环境破败因子m1:利用街景图片结合计算机视觉领域的现有图像识别技术,使用 deeplabv3模型,利用卷积神经网络对实地采集的街景照片进行语义分割,将街景照片中的内容分成不同类要素,汇总各采样点对应的前、后两个方向的要素构成,输入rgb图像,输出分割图像,计算每类要素在街景照片中像素面域的比值,再根据导致环境破败要素在照片中像素面域的比值,进一步得出各路径所涉及街道空间的得出环境破败因子的值;
[0048]
该因子与环境安全情况呈负相关,采用负相关公式进行标准化处理;
[0049]
光照强度因子m2:引入光通量φ(t)进行度量,对每条路径e_i∈e,调取摄像头获取抽样最低光通量φ(t),得到光通量值;
[0050]
该因子与环境安全情况呈正相关采用正相关公式进行标准化处理;
[0051]
人流密度因子m3:针对每条路径e_i∈e,部署客流统计摄像机,客流统计摄像机可
通过其内置的ai人脸识别算法实时获取采集场景内的人流量;调取客流统计摄像机获取实时人流量n_2(t)与该路径街道长度l,求出人流量密度p(t)=(n_2(t))/l,该数值为该路径的人流密度值;
[0052]
该因子与环境安全情况呈正相关,采用正相关公式进行标准化处理。
[0053]
优选地,所述的危险因素只包括公共治安因素p、路径监视因素j、空间场地因素k、安全感知因素m时,所述危险测度代价为i(v_t)=0.33p+0.31j+0.13k+0.23m。
[0054]
基于大数据和定位技术的安全出行路径优化系统,包括服务器端子系统和移动终端子系统;
[0055]
所述移动终端子系统在接收到用户请求的起点及终点位置后,发送至后台服务器端子系统;移动终端子系统同时负责调用高德地图api;
[0056]
服务器端子系统根据接收到起始点和终点的经纬度坐标,并规划步行路线;
[0057]
服务器端子系统包括:
[0058]
图结构构建单元:根据用户在安全地图中输入的起止点,调用高德地图api,获取初始若干步行路径,基于返回的高德地图api的results对象中的导航数据以路口和路径构建图结构g=(v,e);其中v表示路径中对应的节点,e表示节点间的路径;
[0059]
数据获取单元:基于每条路径,获取公共治安因素p、路径监视因素j、空间场地因素 k及安全感知因素m;
[0060]
数据可以通过政府或者其他机构的共享数据平台获取,同时本发明还支撑用户端上传接口获得,即通过接口采集并标记可能在特殊人群(如女性等群体)步行出行过程中生理或心理上会对其安全造成威胁的位置点进行补充上传;
[0061]
路径规划单元:基于大数据和定位技术的安全出行路径优化方法确定最优路径,并回传到移动终端子系统予以图像化显示。
[0062]
进一步地,所述移动终端子系统还包括信息查询显示单元,用于接收用户的查询信息,所述查询信息至少包括:历史案件位置、安保点、24小时便利店、实时人群热度;
[0063]
移动终端子系统向服务器端子系统发出请求,接收服务器端子系统予以反馈,移动终端子系统接收结果并进行图像化显示;该单元为用户出行决策的提供辅助参考信息。
[0064]
进一步地,所述查询信息的获取过程包括以下步骤:
[0065]
通过用户在移动终端子系统中点击查询信息对应的按钮发出请求;
[0066]
在服务器端子系统中,数据获取单元提供查询信息对应的数据;服务器端子系统将查询信息以反馈;
[0067]
移动终端子系统接收结果并进行图像化显示。
[0068]
有益效果:
[0069]
本发明采集、评估步行环境中的不安全因素,在现有地图步行路径基础上,引入了影响出行安全的危险因子项,并基于危险因子项确定街道环境的危险因素,进而得到基于安全考量的最优路径,因此对应得到的规划路径可以很大程度上减少安全风险,从而指引女性等特殊人群安全出行,从源头上尽可能避免女性等特殊人群暴露在危险环境当中,减少女性等特殊人群出行过程中的风险与恐惧,提高特殊人群出行安全度。
附图说明
[0070]
图1为路径优化方法流程图;
[0071]
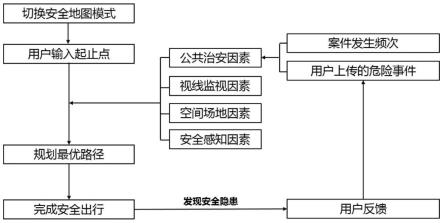
图2为安全路径规划的逻辑图;
[0072]
图3为基于高德地图的用户界面示意图;
[0073]
图4为移动终端子系统显示的历史案件发生地点的核密度界面示意图。
具体实施方式
[0074]
具体实施方式一:结合图1和图2说明本实施方式。
[0075]
本实施方式为基于大数据和定位技术的安全出行路径优化方法,所述方法具体包括以下步骤:
[0076]
步骤一:用户在移动终端输入的起止点a-》b,调用高德地图api,获取初始若干步行路径,基于返回的高德地图api的results对象中的导航数据以路口和路径构建图结构g=(v, e),其中v表示路径中对应的节点,e表示节点间的路径;
[0077]
步骤二:综合计算公共治安因素、路径监视因素、空间场地因素、安全感知因素等危险因素的代价后,采用改进a*算法形成最优路径,回传到用户移动终端界面予以图像化显示,供用户参考;
[0078]
所述改进a*算法基于女性安全地图导航场景提出,结合了公共治安因素、路径监视因素、空间场地因素、安全感知因素等耦合构建危险测度模型,改进a*算法的优先级代价函数为
[0079]
f(v_t)=χ1g(v_t)+χ2h(v_t)+χ3i(v_t)
[0080]
其中,χ1、χ2、χ3为权重参数,权重χ1+χ2+χ3=1;g(v_t)为移动代价,具体体现为从起始点已经行进的距离;h(v_t)为估算成本,具体体现为对剩余距离的估计,在地图导航策略中可以用当前位置与终点位置的直线距离表示。这两项均集成于高德导航api中,由高德 api自动计算。本发明的核心在于在代价函数中增加了危险测度代价i(v_t);用户或二次开发者可以根据具体对危险代价的衡量进一步对参数进行调整处理。
[0081]
所述危险测度代价为基于危险测度模型建立的危险测度代价函数,危险测度模型包括公共治安因素、路径监视因素、空间场地因素、安全感知因素,其危险测度代价函数为
[0082]
i(v_t)=0.33p+0.31j+0.13k+0.23m
[0083]
其中,p、j、k、m分别为公共治安因素、路径监视因素、空间场地因素、安全感知因素的无量纲化处理后的标准值。
[0084]
危险测度模型中各因素的不同因子因其测算方式不同而具有不同的取值范围,统计单位不同、数值意义也不同,因此不同因子之间不具有可比性,为便于对各项因子进行比较和分析,将不同危险因子项的原始数据通过最大值化法进行无量纲化处理,处理后的各项因子的模拟数据映射到0-1范围之内,以实现不同因子之间的统一化处理。
[0085]
危险测度模型在模拟过程中,模拟用户在移动终端输入的起止点a-》b获取的所有节点间的路径(e)的因子的原始数据(即若a-》b有72种节点间的路径组合,则分别模拟出72种组合的危险因子项数据,得到72组原始数据组成原始数据组),建立原始数据组,获取原始数据组中最大值和最小值。
[0086]
对于变量指标值与环境安全情况呈正相关的情况(即指标数值越大,路径环境越
安全) 与负相关的情况分别采用不同的公式。
[0087]
正相关:
[0088][0089]
负相关:
[0090][0091]
其中,x
1ij
为无量纲化处理后的危险因素中的危险因子项(模拟路径因子)数据,x
ij
为危险因素中的危险因子项(模拟路径因子)原始数据,x
jmax
为因子的数据组的最大值, x
jmin
为因子的数据组的最小值,i表示模拟的路径编号,j表示危险因素的编号。
[0092]
(一)所述公共治安因素p包括以下两项因子,其函数为
[0093]
p=0.59p1+0.41p2[0094]
治安案件危险因子项p1:
[0095]
运用arcgis软件中核密度工具和缓冲区分析模块,根据收集到的公共治安案件数据模拟绘制犯罪热点地图;基于每条路径,获取路径及附近(以arcgis软件缓冲区分析中可覆盖到该路径的公共安全数据为基础)公共治安数据,记录该路径历年(默认5年)内曾发生的安全事件类型和数量n(单位:起),过程中对不同类型的案件赋予不同的权重值,“人身伤害、性骚扰、绑架”(涉及人身安全的案件)的权重为5,“抢劫”(可能危及人身安全的财产案件)为3,“失窃”(普通的财产案件)为1,按照权重加和得到p1。
[0096]
该因子与环境安全情况呈负相关,采用负相关公式进行无量纲化处理。
[0097]
用户上传的危险因子项p2:
[0098]
通过接口采集并标记女性等特殊人群步行出行过程中,在生理或心理上会对其安全造成威胁的位置点,以10m、300m、1000m为半径建立多重缓冲区,并分别对位于三个层次缓冲区中对应位置的危险因子项赋值为0.68、0.21、0.11;若有某个位置点处于不同标记为会对安全造成威胁的位置点的缓冲区内,选择数值最大的缓冲区赋值;如果某个位置点不处于任一标记为会对安全造成威胁的位置点的缓冲区内,设置为0。
[0099]
该因子与环境安全情况呈负相关,采用负相关公式进行无量纲化处理。
[0100]
(二)所述路径监视因素j包括监视性因素中包括正式监视和非正式监视两种类型,共六项因子,其函数为
[0101]
j=0.19j1+0.35j2+0.17j3+0.08j4+0.09j5+0.12j6。
[0102]
所述正式监视包括监控因子j1和安保点辐射因子j2;
[0103]
1.监控因子j1:
[0104]
监控摄像头呈点状分布,其影响随着距离衰减,因此将摄像头的最大监视范围按照50m,运用arcgis软件中现有空间分析工具中的距离分子中的欧氏距离分析模块进行模拟。
[0105]
该因子与环境安全情况呈正相关,采用正相关公式进行无量纲化处理。
[0106]
2.安保点辐射因子j2:
[0107]
安保点呈点状分布,其影响随着距离衰减,安保点最大辐射范围按照1千米(km,计算时单位都为km),同样运用arcgis软件中现有空间分析工具中的距离分子中的欧氏距离
分析模块进行模拟。
[0108]
该因子与环境安全情况呈正相关,采用正相关公式进行无量纲化处理。
[0109]
所述非正式监视包括商铺密度因子j3、邻里守望因子j4、界面围合度因子j5和视线整合度j6;
[0110]
3.商铺密度因子j3:
[0111]
采用所有商铺的开间长度与商铺所在街道总长度(长度以m为单位)进行量化评价,即:j3=所有商铺的开间长度/商铺所在街道总长度;
[0112]
这里所述的商铺的开间长度是指商铺在街道长度方向上所占据的长度。
[0113]
该因子与环境安全情况呈正相关,采用正相关公式进行无量纲化处理。
[0114]
4.邻里守望因子j4:
[0115]
通过租住比进行量化评价,即:j4=面向该路径的住宅的出租数量/面向该路径的住宅总数量。
[0116]
该因子与环境安全情况呈正相关,采用正相关公式进行无量纲化处理。
[0117]
5.界面围合度因子j5:
[0118]
运用arcgis软件中现有栅格计算模块实现界面围合度的模拟,将建筑与植被造成的影响按7:3计。按照“建筑==7,植被==3”为每个栅格赋一个基本的围合度数值之后,应用栅格邻域计算工具进行栅格二次计算,将每个栅格周围一定范围内所有栅格的围合度数值的平均值作为该栅格的最终围合度值。在具体测度范围上,选取以每个栅格为中心上下左右各40m的矩形来进行限定,在40m距离内,可以听到大声的呼叫声,并且基本分辨人物的动作,这是第三方人员救援行为发生的前提。
[0119]
该因子与环境安全情况呈正相关,采用正相关公式进行无量纲化处理。
[0120]
6.视线整合度因子j6:
[0121]
引入空间句法中对空间视线的测度方式,运用depthmap软件视线分析模块实现视线整合度的模拟,得到各路径的视线整合度原始数值。visualintegration[hh]的值越高,表示该元素只需要较少的转折就可以看到空间其他元素,也就是说在整个路径中被看到的机会越多,从此位置出发的视野也越好。将空间细分为一定数量的网格,每个网格视为一个“元素”进行运算,分析各元素之间的视线关系选择30m作为视线深度的上限,即在运算45m 的距离将深度记为2;
[0122]
该因子与环境安全情况呈正相关,采用正相关公式进行无量纲化处理。
[0123]
(三)所述空间场地因素k包括路径集成度因子k1、路径穿行度因子k2,其函数为
[0124]
k=0.67k1+0.33k2[0125]
1.路径集成度因子k1:
[0126]
引入空间句法中对空间整合性的测度方式,运用depthmapx软件集成度分析模块实现对路径集成度的模拟,得到各路径的集成度原始数值。某空间集成度(integration)越高,该路段空间作为目的地吸引到达交通的能越强,路径空间在整个系统中的中心性越强。
[0127]
该因子与环境安全情况呈正相关,采用正相关公式进行无量纲化处理。
[0128]
2.路径穿行度因子k2:
[0129]
引入空间句法中对空间选择性的测度方式,运用depthmapx软件空间穿行度分析模块实现对路径穿行度的模拟,得到各路径的穿行度原始数值。穿行度越高则表示路段空
间被穿行的可能性就越大、空间活力越高,越容易聚集人流,所产生的公共安全监视性越好。
[0130]
该因子与环境安全情况呈正相关,采用正相关公式进行无量纲化处理。
[0131]
(四)所述安全感知因素m包括环境破败因子m1、光照强度因子m2、人口流密度量因子m3,其函数为:
[0132]
m=0.22m1+0.42m2+0.36m3[0133]
1.环境破败因子m1:
[0134]
运用街景图片结合计算机视觉领域的现有图像识别技术,使用deeplabv3模型,利用卷积神经网络对实地采集的街景照片进行语义分割,将街景照片中的内容分成18类要素(包括建筑、墙体、围墙栅栏、杆、信号灯、指示牌、水平绿化、垂直绿化、天空、行人、汽车、卡车、公交车、自行车、电动车、骑行者、垃圾堆、杂物堆),汇总各采样点对应的前、后两个方向的要素构成,输入rgb图像,输出分割图像,计算每类要素在街景照片中像素面域的比值,再根据导致环境破败(即杂物堆、垃圾堆等)要素在照片中像素面域的比值,进一步得出各路径所涉及街道空间的得出环境破败因子的值。
[0135]
该因子与环境安全情况呈负相关,采用负相关公式进行无量纲化处理;
[0136]
2.光照强度因子m2:
[0137]
夜间照明亮度、灯光布局及灯光照明方位会影响出行者的安全感知,但道路中光源不局限于路灯与沿街店铺橱窗招牌灯光,单纯用路灯光源和沿街店铺密度度量光照强度并不能客观反映实时街道照明状况,因此引入光通量φ(t)进行度量。对每条路径e_i∈e,调取摄像头获取抽样最低光通量φ(t)(单位:lx),得到光通量原始值,光通量越高表示该路径的可视性越好,步行者心理安全感知越强。
[0138]
该因子与环境安全情况呈正相关采用正相关公式进行无量纲化处理。
[0139]
3.人流密度因子m3:
[0140]
针对每条路径e_i∈e,部署客流统计摄像机(海康威视等),客流统计摄像机可通过其内置的ai人脸识别算法实时获取采集场景内的人流量。调取客流统计摄像机获取实时人流量n_2(t)与该路径街道长度l(米),求出人流量密度p(t)=(n_2(t))/l(人/米),该数值为该路径的人流密度原始值,人流量密度越高,表明该路径同行者越多,步行者心理安全感知越强。
[0141]
该因子与环境安全情况呈正相关,采用正相关公式进行无量纲化处理。
[0142]
所述危险测度模型在理论构建上主要借鉴了由简雅各布斯“街道眼”理念发展而来的 cpted理论,在其理论框架基础上理出对步行安全产生影响的4大因素类型共13个具体因子以完成步行安全的测度模型的构建。
[0143]
在技术手段上主要依靠arcgis技术平台强大的计算与环境模拟功能进行路径安全的整体评价。主要用到的现有模拟方法包括:
[0144]
(1)网络数据集(network dataset)与服务区(new service area):将路径进行拓扑处理,转化为具有等级、长度、路口等属性的数据集,使其能够模拟转弯和通行。服务区是从网络内任意点开始,包含所有可访问路径的区域,例如网络上某个点的5分钟服务区域包括从该点开始五分钟之内可以到达的所有路径。
[0145]
(2)欧氏距离(euclidean distance):欧氏距离工具根据直线距离描述每个像元
与一个源或一组源的关系,给出从栅格中的每个像元到最近的源的距离。
[0146]
(3)成本距离(cost distance):成本距离工具的输出记录了从每个像元到最近来源的累积成本。与欧氏距离类似,但是成本距离工具计算的是从每个像元到最近源位置的最短加权距离,而不是计算从一个位置到另一位置的实际距离。因为采用的是成本单位而不是地理单位,所以需要源数据集和成本栅格作为输入对象。
[0147]
(4)多重缓冲区(multiple ring buffer):在输入要素周围指定距离处创建多个缓冲区。
[0148]
(5)密度算法(point/line density):空间插值的一种方式,根据给定数量的点或线及其位置分布情况,生成区域平滑表面。点密度工具计算每个输出栅格像元周围的点要素的密度。从概念上讲,在每个栅格像元中心周围定义了一个邻域,并且将落入该邻域内的点的数量总计并除以该邻域的面积。线密度工具则计算每个输出栅格像元附近的线性要素的密度。
[0149]
(6)栅格邻域计算(neighborhood statistics):邻域计算通过计算每个邻域中包含的所有输入像元的指定统计量来计算输出值。
[0150]
由于之前的数据的相应研究和应用较少,为了方便操作,本实施方案中危险测度模型在权重分配上主要借助ahp层次分析法建立判断矩阵,通过专家的打分最终确定因子之间的权重分配方案(具体操作ahp权重计算软件构建判断矩阵,确定权重。再次邀请先前进行过培训的专业从业专家,对选取的13项危险因子项与4大类危险因素进行同层次的两两对比和打分,最终通过一致性检验(即cr《0.1)得到最后的权重结果),当然此权重结果可以抽象为i(v_t)=μ1p+μ2j+μ3k+μ4m(其中μ1+μ2+μ3+μ4=1)。每个大类危险因素也可以抽象为p=λ
p1
p1+λ
p2
p2(其中λ
p1
+λ
p2
=1);j=λ
j1
j1+λ
j2
j2+λ
j3
j3+λ
j4
j4+λ
j5
j5+λ
j6
j6(其中λ
j1
+λ
j2
+λ
j3
+λ
j4
+λ
j5
+λ
j6
);k=λ
k1
k1+λ
k2
k2(其中λ
k1
+λ
k2
=1);m=λ
m1
m1+λ
m2
m2+λ
m3
m3(其中λ
m1
+λ
m2
+λ
m3
=1)。
[0151]
本危险测度模型中各危险因子项权重参数可以根据二次开发使用需求重新确定权重数值。本危险测度因子在选择时尽量涵盖在路径规划中对弱势群体出行安全造成影响的因素,但仍具有一定的局限性,影响因子可以包括以上4大类13小类,但不局限于此,影响因子可以在二次开发时和弱势群体用户需求进行补充,更新完善测度模型。
[0152]
在本实施方式中,由于高德的地图拓扑数据无法获取,本工作采用以路径为主的贪心策略进行结合危险测度代价的a*规划;首先输入起始点坐标后,调用高德api中的多路径步行路线规划模块:输入起点、终点:
[0153]
navipoi start=new navipoi("起始位置",null,"高德poiid");
[0154]
navipoi end=new navipoi("结束位置",null,"高德poiid");
[0155]
其中高德poiid为高德api获取;
[0156]
然后进行多路径规划:
[0157]
amapnavi.getinstance(this).calculatewalkroute(start,end,travelstrategy.multiple);
[0158]
触发回调获取规划路线:
[0159]
hashmap《integer,amapnavipath》navipaths=amapnavi.getinstance(this).getnavipaths();
[0160]
获取到多个路径规划方案后,在不同路径进行模拟导航,遍历不同方案navipath_
i的第一个路口poi_i^1,作为a*算法中根节点的叶节点(与根节点直接相连的节点,在此处可指代下一个路口,即下一个决策单位)。计算不同叶节点路径的危险测度代价i(v_t)^1。同时计算第一个路口的移动代价g(v_t)和剩余距离估计h(v_t)。将规划的起点更换为第一层路口(根据代价计算,从以上备选项中确定好通往的路口后,将根节点更新成该路口),再进行以上步骤,通过这种动态节点展开的a*算法,得到起点到终点的最小代价值,给出规划结果;
[0161]
根据以上流程得到的起终点和途经点,在高德地图api中调用独立路径规划接口
[0162]
public boolean independentcalculateroute(navipoi frompoi,navipoi topoi, list《navipoi》waypoints,int strategy,int transporttype, amapnaviindependentroutelistener observer);
[0163]
其中包含起点信息frompoi、终点信息topoi和途经点信息waypoints,其中途经点即为上一步骤中得到的规划路径上的逐个路口,其他部分都按步行设置;
[0164]
在显示上,通过自定义标注接口public void setwaypointbitmap(bitmap icon)进行各个危险因素指标标注。
[0165]
因此相比于传统的基于路径最短或者通行时间最短(考虑拥堵等因素)的路径规划,针对特殊群体(尤其是女性群体)的出行安全(尤其是傍晚或夜间),本发明可以有效提供更加安全的路径规划,可有有效的解决现有的路径规划方法没有考虑安全出行信息的问题。
[0166]
具体实施方式二:结合图2说明本实施方式。
[0167]
本实施方式为基于大数据和定位技术的安全出行路径优化系统,包括服务器端子系统和移动终端子系统;
[0168]
所述移动终端子系统在接收到用户请求的起点及终点位置后,发送至后台服务器端子系统;移动终端子系统同时负责调用高德地图api;
[0169]
服务器端子系统根据接收到起始点和终点的经纬度坐标,并规划步行路线;
[0170]
服务器端子系统包括:
[0171]
图结构构建单元:根据用户在安全地图中输入的起止点,调用高德地图api,获取初始若干步行路径,基于返回的高德地图api的results对象中的导航数据以路口和路径构建图结构g=(v,e);其中v表示路径中对应的节点,e表示节点间的路径。
[0172]
数据获取单元:基于每条路径,获取公共治安因素p、路径监视因素j、空间场地因素 k及安全感知因素m;
[0173]
数据可以通过政府或者其他机构的共享数据获取,同时本发明还支撑用户端上传接口获得,即通过接口采集并标记可能在女性等人员步行出行过程中生理或心理上会对女性安全造成威胁的位置点进行补充上传。
[0174]
路径规划单元:基于大数据和定位技术的安全出行路径优化方法确定最优路径,并回传到移动终端子系统予以图像化显示。
[0175]
更进一步地,如图3所示,所述移动终端子系统还包括信息查询显示单元,用于接收用户的查询信息,所述查询信息包括:历史案件位置、安保点、24小时便利店、实时人群热度等。移动终端子系统向服务器端子系统发出请求,接收服务器端子系统予以反馈,移动终端子系统接收结果并进行图像化显示;该单元为用户出行决策的提供辅助参考信息。
[0176]
历史案件位置信息的获取过程:通过用户在移动终端子系统中点击“历史案件”按钮发出请求,在服务器端子系统中,数据获取单元提供历史案件位置信息,包括历史案件发生地点与用户出行完成后自主上传的危险地点。服务器端子系统将历史案件发生地点的核密度及用户上传危险地点的地理坐标的核密度予以反馈,移动终端子系统接收结果并进行图像化显示,如图4所示。
[0177]
安保点信息的获取过程与历史案件位置信息的获取过程类似,通过用户点击“安保点”按钮,移动终端子系统发出请求并接收反馈结果,将安保点的地理坐标予以图像化显示。
[0178]
24小时便利店信息的获取过程与历史案件位置信息的获取过程类似,通过用户点击“24h便利店”按钮,移动终端子系统发出请求并接收反馈结果,将24小时便利店的地理坐标予以图像化显示。
[0179]
实时人群热度信息的获取过程与历史案件位置信息的获取过程类似,通过用户点击“人群热度”按钮,移动终端子系统发出请求,同时将用户的gps定位信息一起发送;服务器端子系统根据定位点疏密区分实时人群热度图斑,予以反馈;移动终端子系统接收反馈结果,然后将实时人群热度图斑予以图像化显示。
[0180]
更进一步地,所述移动终端子系统还包括紧急呼救单元,用于获取用户的“紧急呼救”触发信息,然后启动紧急呼救措施和/或报警措施;紧急呼救措施包括启动伪装来电、虚拟警笛等应急措施。用户可预先自定义设置伪装来电、虚拟警笛等应急措施的优先次序,用户在紧急情况下触发“紧急呼救”按钮、按键或操作,即可启动次序最优先的求救措施。
[0181]
所述伪装来电应急措施,在用户察觉周围出现潜在危险情况,在已经被自定义设置为优先应急措施的前提下,可通过连续敲击屏幕或连续按音量调节键来触发伪装来电功能,对潜在危险对象起到警示作用。
[0182]
所述虚拟警笛应急措施,在用户察觉周围出现潜在危险情况时,在已经被自定义设置为优先应急措施的前提下,可通过连续敲击屏幕或连续按音量调节键来触发伪装来电功能,对潜在危险对象起到警示、震慑作用,同时可以引起附近居民、行人等人群的关注,以保护自身安全。
[0183]
本发明的上述算例仅为详细地说明本发明的计算模型和计算流程,而并非是对本发明的实施方式的限定。对于所属领域的普通技术人员来说,在上述说明的基础上还可以做出其它不同形式的变化或变动,这里无法对所有的实施方式予以穷举,凡是属于本发明的技术方案所引伸出的显而易见的变化或变动仍处于本发明的保护范围之列。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1