三维测量装置的制作方法
三维测量装置
1.本技术是申请日为2021年2月18日、申请号为202110187715.2、发明名称为三维测量装置的专利申请的分案申请。
技术领域
2.本发明涉及一种三维测量装置。
背景技术:
3.作为现有的三维测量法,有例如美国专利申请公开第2008/0240502号说明书(专利文献1)所记载的方法。在该专利文献1的方法中,将随机圆点图案照射到被测量物,通过两台摄像头分别对同位置的圆点图案进行摄像。然后,基于两个圆点图案的视差,根据三角测量原理实施被测量物的三维测量。
4.另外,例如日本特开2011-242178号公报(专利文献2)所记载的方法是使用相移法的测量方法。在该专利文献2的方法中,准备具有被投影格子图案的基准面的基准平板,通过工作台使该基准平板沿法线方向平行移动。对被投影到基准面的格子图案的图像和被投影到被测量物的格子图案的图像进行摄像,使用使格子图案的相位和空间坐标对应的表算出被测量物的空间坐标。
技术实现要素:
5.在上述的专利文献1的方法中,使用投影仪作为光源,在专利文献2的方法中,使用led阵列作为光源。因此,存在三维测量装置较大型化等的问题。作为摄像装置,也开发了一种例如1mm见方以下的超小型摄像头,为了使三维测量装置整体小型化,重要的是使光源小型化。认为只要能够使三维测量装置整体小型化,就可以应用于例如口腔检查、内窥镜检查、管的内部或壁的间隙等狭窄部位的检查、家具或装置等自地板下的检查等用途,或者构筑手持式三维测量装置。另外,在将光源应用于三维测量装置时,从提高测量精度的观点来看,优选为抑制所输出的光的噪声或畸变的光源。
6.本发明是为了解决上述技术问题而创建的,其目的在于,提供一种三维测量装置,其通过装置的小型化实现应用范围的扩大,并实现测量精度的提高。
7.本发明的一方面的三维测量装置,具备:一个或多个光源部,其对被测量物照射具有规定图案的测量光;一个或多个摄像部,其对被照射了测量光的被测量物进行摄像;测量部,其基于摄像部的摄像结果测量被测量物的三维形状,光源部由m点振荡的s-ipmsel构成。
8.在该三维测量装置中,光源部由m点振荡的s-ipmsel构成。s-ipmsel具备具有基本层和折射率与基本层不同的多个不同折射率区域的相位调制层,各不同折射率区域的重心位置根据输出光图像偏离假想正方格子的格子点位置。s-ipmsel以例如针尖那样的尺寸构成,能够沿垂直于设置有相位调制层的基板的主面的方向或相对于该主面倾斜的方向输出二维图案的光图像。因此,通过以s-ipmsel为光源,能够实现三维测量装置整体的小
型化,实现装置的应用范围的扩大。另外,通过使用m点振荡的s-ipmsel,能够消除与希望的二维图案的光图像不同的0次光(未被相位调制的衍射波分量)的输出。由此,可以将无0次光引起的噪声或畸变的图案的测量光照射到被测量物,实现测量精度的提高。
9.也可以是,三维测量装置包含单体的光源部和多个摄像部,测量光的所述规定图案为由圆点图案、条形图案及格子图案中的任一个构成的周期图案,测量部基于使用周期图案的主动立体声法测量被测量物的三维形状。在该情况下,可进行使用纹理少的图像的三维测量、暗部处的三维测量。
10.三维测量装置包含单体的所述光源部和多个摄像部,测量光的规定图案为随机圆点图案,测量部基于使用随机圆点图案的主动立体声法测量被测量物的三维形状。在该情况下,通过使用随机圆点图案而非周期圆点图案,能够抑制通过不同的摄像部摄像圆点图案的同一点时的误识别。
11.也可以是,三维测量装置包含单体的光源部和多个摄像部,测量光的规定图案为具有均匀密度的图案,测量部基于使用具有均匀密度的图案的主动立体声法测量被测量物的三维形状。来自s-ipmsel的射出光为激光,因此,在散射光中可能出现散斑。因此,即使在使用具有均匀密度的图案的情况下,也会在测量光的图案中形成随机圆点图案。通过使用该随机圆点图案,能够抑制通过不同的摄像部摄像圆点图案的同一点时的误识别。
12.也可以是,三维测量装置包含多个光源部和单体的摄像部,测量光的规定图案为格雷码图案,测量部基于使用格雷码图案的三角测量法测量被测量物的三维形状。格雷码图案的图案数相对于摄像部的像素数为少数即可,因此,具有格雷码图案的测量光的照射能够通过少数光源部实现。在使用格雷码的情况下,相邻的像素的汉明距离为1,即使在复原位流时发生位错,该误差也收敛于1。即,在格雷码中,可得到噪声大的符号。
13.也可以是,三维测量装置包含多个光源部和单体的摄像部,测量光的规定图案为正弦波状的条形图案,测量部基于使用正弦波状的条形图案的相移法测量被测量物的三维形状。在该情况下,通过对所测量的相位进行高度换算,能够以小于正弦波状的条形图案的节距的间隔测量被测量物的高度。
14.也可以是,多个光源部分别输出周期互不相同的正弦波状的条形图案。在相移法中,相位2π下的不连续性成为技术问题。与此相对,通过使用周期互不相同的正弦波状的条形图案,可以改善相位2π下的不连续性,能够通过少数图案实现高精度的三维测量。
15.也可以是,三维测量装置包含多个光源部和单体的摄像部,测量光的规定图案为正弦波状的条形图案,测量部基于使用正弦波状的条形图案的采样莫尔法测量被测量物的三维形状。在该情况下,能够通过更少数的图案实现高精度的三维测量。
16.也可以是,三维测量装置包含多个光源部和单体的摄像部,测量光的规定图案为使正弦波状的条形图案和随机圆点图案重叠的重叠图案,测量部基于使用重叠图案的相移法测量被测量物的三维形状。在相移法中,相位2π下的不连续性成为技术问题。与此相对,通过使用随机圆点图案,可以改善相位2π下的不连续性,能够通过少数图案实现高精度的三维测量。
17.也可以是,三维测量装置包含多个光源部和单体的摄像部,测量光的规定图案包含正弦波状的条形图案和格雷码图案,测量部基于使用正弦波状的条形图案的相移法及使用格雷码图案的三角测量法测量被测量物的三维形状。在相移法中,相位2π下的不连续性
成为技术问题。与此相对,通过使用格雷码,可以改善相位2π下的不连续性,能够通过少数图案实现高精度的三维测量。
18.也可以是,三维测量装置包含多个光源部和多个摄像部,测量光的规定图案为正弦波状的条形图案,测量部基于使用正弦波状的条形图案的相移法及主动立体声法测量被测量物的三维形状。在该情况下,通过对所测量的相位进行高度换算,能够以小于正弦波状的条形图案的节距的间隔测量被测量物的高度。另外,在相移法中,相位2π下的不连续性成为技术问题。与此相对,通过将使用多个摄像部的主动立体声法组合,可以改善相位2π下的不连续性,能够通过少数图案实现高精度的三维测量。
19.也可以是,光源部及摄像部配置于立体物的表面。在该情况下,能够将配置有光源部及摄像部的立体物构成为三维测量装置的探针。通过使用立体物,能够使光源部及摄像部各自的组朝向互不相同的方向,因此,可以以大的立体角实施被测量物的三维形状测量。另外,容易应用于例如口腔检查、内窥镜检查、管的内部或壁的间隙等狭窄部位的检查、家具或装置等自地板下面的检查等用途,或者构筑手持式三维测量装置。
附图说明
20.图1是表示s-ipmsel的结构的局部立体剖视图。
21.图2是表示s-ipmsel的层叠结构的剖视图。
22.图3是相位调制层的俯视图。
23.图4是扩大表示单位构成区域r的图。
24.图5是表示在相位调制层的特定区域内应用折射率大致周期结构的例子的俯视图。
25.图6是说明s-ipmsel的输出光束图案成像而得到的光图像和相位调制层上的旋转角度分布的关系的图。
26.图7是说明从球面坐标向xyz正交坐标系中的坐标的坐标变换的图。
27.图8是表示关于m点振荡的s-ipmsel的相位调制层的倒格子空间的俯视图。
28.图9是说明面内波数矢量加上衍射矢量的状态的概念图。
29.图10是用于示意性地说明光线的周边结构的图。
30.图11是概念性地表示旋转角度分布φ2(x,y)的一例的图。
31.图12是用于说明从方向的面内波数矢量中去除波数扩散再加上衍射矢量的状态的概念图。
32.图13是变形例的相位调制层的俯视图。
33.图14是表示变形例的相位调制层上的不同折射率区域的位置关系的图。
34.图15是表示第一实施方式的三维测量装置的结构的概略图。
35.图16是表示第一实施方式中使用的周期图案的一例的图。
36.图17是表示周期图案的远场图像的一例的图。
37.图18是表示第一实施方式中使用的随机圆点图案的一例的图。
38.图19是表示第一实施方式中使用的具有均匀密度的图案的一例的图。
39.图20是表示具有均匀密度的图案的ffp的一例的图。
40.图21是表示第二实施方式的三维测量装置的结构的概略图。
41.图22是表示第二实施方式中使用的格雷码图案的一例的图。
42.图23是表示第二实施方式中使用的正弦波状的条形图案的一例的图。
43.图24是表示第二实施方式中使用的正弦波状的矩阵图案的一例的图。
44.图25是表示相位2π下的不连续性的改善情形的图。
45.图26是表示第二实施方式中使用的莫尔条纹图案的一例的图。
46.图27是表示第二实施方式中使用的重叠图案的一例的图。
47.图28是表示第二实施方式中使用的重叠图案的另一例的图。
48.图29是表示第三实施方式的三维测量装置的结构的概略图。
49.图30是表示光源部及摄像部的配置例的概略立体图。
50.图31是表示光源部及摄像部的另一配置例的概略立体图。
51.图32是表示正弦波状的条形图案的形成例的立体图。
52.图33是表示多点图案的激光及使用该激光的条形图案的一例的概略图。
53.图34是表示多点图案的激光及使用该激光的条形图案的另一例的概略图。
54.图35是表示金属透镜结构的构成例的概略剖视图。
具体实施方式
55.下面,参照附图,对本发明的一方面的三维测量装置的优选实施方式进行详细的说明。
56.本实施方式的三维测量装置101被构成为具备对被测量物sa照射具有规定图案的测量光105的一个或多个光源部102、对被照射了测量光105的被测量物sa进行摄像的一个或多个摄像部103、基于摄像部103的摄像结果测量被测量物sa的三维形状的测量部104(参照图15等)。另外,光源部102由m点振荡的s-ipmsel(static-integrable phase modulating surface emitting lasers(静态可积分相位调制面发射激光器))1构成。
57.在三维测量装置101中,通过使用以针尖那样的尺寸构成的s-ipmsel1构成光源部102,能够将装置整体小型化,实现装置的应用范围的扩大。另外,在三维测量装置101中,通过使用m点振荡的s-ipmsel1,能够消除与希望的二维图案的光图像不同的0次光(未被相位调制的衍射波分量)的输出。由此,可以将无0次光引起的噪声或畸变的图案的测量光105照射到被测量物sa,实现测量精度的提高。
58.[m点振荡的s-ipmsel]
[0059]
首先,对m点振荡的s-ipmsel1进行说明。图1是表示sipmsel的结构的局部立体剖视图。图2是表示s-ipmsel的层叠结构的剖视图。在图1中,定义以在s-ipmsel1的中心沿s-ipmsel1的厚度方向延伸的轴为z轴的xyz正交坐标系。
[0060]
s-ipmsel1是在xy面内方向上形成驻波,沿z轴方向输出被相位控制的平面波的激光光源。s-ipmsel1输出垂直于半导体基板10的主面10a的方向(即z轴方向)或相对于该主面10a倾斜的方向、或者包含这两个方向的二维的任意形状的光图像。
[0061]
如图1及图2所示,s-ipmsel1具备设置于半导体基板10上的作为发光部的活性层12、夹持活性层12的一对包覆层11、13、以及设置于包覆层13上的接触层14。这些半导体基板10、包覆层11、13及接触层14由例如gaas系半导体、inp系半导体或氮化物系半导体等化合物半导体构成。包覆层11的能量带间隙及包覆层13的能量带间隙大于活性层12的能量带
间隙。半导体基板10及各层11~14的厚度方向与z轴方向一致。
[0062]
s-ipmsel1还具备与活性层12光学耦合的相位调制层15。在本实施方式中,相位调制层15设置于活性层12和包覆层13之间。相位调制层15的厚度方向与z轴方向一致。相位调制层15也可以设置于包覆层11和活性层12之间。根据需要,导光层也可以设置于活性层12和包覆层13之间及活性层12和包覆层11之间中的至少一方。导光层可以包含用于将载流子高效地封闭到活性层12的载流子势垒层。
[0063]
相位调制层15被构成为包含由第一折射率介质构成的基本层15a和由折射率与第一折射率介质不同的第二折射率介质构成且存在于基本层15a内的多个不同折射率区域15b。多个不同折射率区域15b包含大致周期结构。在设模式的等效折射率为n的情况下,由相位调制层15选择的波长λ0(=(√2)a
×
n,a为格子间距)包含在活性层12的发光波长范围内。相位调制层15能够选择活性层12的发光波长中的波长λ0附近的带端波长,并将其输出到外部。入射到相位调制层15内的激光在相位调制层15内形成与不同折射率区域15b的配置相应的规定模式,作为具有希望的图案的激光光束,从s-ipmsel1的表面射出到外部。
[0064]
s-ipmsel1还具备设置于接触层14上的电极16和设置于半导体基板10的背面10b上的电极17。电极16与接触层14欧姆接触,电极17与半导体基板10欧姆接触。电极17具有开口17a。电极16设置于接触层14的中央区域。接触层14上的除电极16外的部分被保护膜18(参照图2)覆盖。由于电流范围的限定,也可以去除与电极16未接触的接触层14。半导体基板10的背面10b上的除电极17外的部分包含开口17a内而被防反射膜19覆盖。也可以去除位于开口17a以外的区域的防反射膜19。
[0065]
在s-ipmsel1中,如果对电极16和电极17之间供给驱动电流,则在活性层12内发生电子和空穴的再结合,活性层12发光。对该发光作出贡献的电子、空穴及活性层12中产生的光被高效地封闭在包覆层11及包覆层13之间。
[0066]
从活性层12射出的光入射到相位调制层15的内部,形成与相位调制层15的内部的格子结构相应的规定模式。从相位调制层15射出的激光从背面10b穿过开口17a而被直接输出到s-ipmsel1的外部。或者,从相位调制层15射出的激光在电极16中发生反射,之后,从背面10b穿过开口17a而被输出到s-ipmsel1的外部。此时,激光中包含的信号光(测量光105)向包含垂直于主面10a的方向或相对于该主面10a倾斜的方向的二维的任意方向射出。形成希望的光图像的是该信号光。信号光主要为激光的1次光及-1次光。激光的0次光未从本实施方式的相位调制层15输出。
[0067]
图3是相位调制层15的俯视图。如该图所示,相位调制层15包含由第一折射率介质构成的基本层15a和由折射率与第一折射率介质不同的第二折射率介质构成的多个不同折射率区域15b。在图3中,针对相位调制层15设定xy面内的假想正方格子。正方格子的一边平行于x轴,另一边平行于y轴。遍及沿着x轴的多列及沿着y轴的多行地呈二维状设定以正方格子的格子点o为中心的正方形状的单位构成区域r。如果在各单位构成区域r的重心位置规定各单位构成区域r的xy坐标,则这些重心位置与假想正方格子的格子点o一致。多个不同折射率区域15b例如逐一设置于各单位构成区域r内。不同折射率区域15b的平面形状例如为圆形状。格子点o可以位于不同折射率区域15b的外部,也可以位于不同折射率区域15b的内部。
[0068]
在一个单位构成区域r内占用的不同折射率区域15b的面积s的比例被称为填充因
子(ff)。如果设正方格子的格子间距为a,则不同折射率区域15b的填充因子ff被赋予为s/a2。s为xy平面上的不同折射率区域15b的面积。例如,在不同折射率区域15b的形状为正圆形状的情况下,填充因子ff使用正圆的直径d而被赋予为s=π(d/2)2。在不同折射率区域15b的形状为正方形的情况下,填充因子ff使用正方形的一边的长度la而被赋予为s=la2。
[0069]
图4是扩大表示单位构成区域r的图。如该图所示,不同折射率区域15b各自具有重心g。在此,设从格子点o朝向重心g的矢量和x轴所形成的角度为φ(x,y)。x表示x轴上的第x个格子点的位置,y表示y轴上的第y个格子点的位置。在旋转角度φ为0
°
的情况下,连接格子点o和重心g的矢量的方向与x轴的正方向一致。另外,设连接格子点o和重心g的矢量的长度为r(x,y)。在一例中,r(x,y)不管x、y如何而在相位调制层15整体上为一定。
[0070]
如图3所示,根据与希望的光图像相应的相位图案,针对每一格子点o个别地设定连接格子点o和重心g的矢量的方向、即不同折射率区域15b的重心g的格子点o周围的旋转角度φ。相位图案、即旋转角度分布φ(x,y)针对每一由x、y的值确定的位置具有特定的值,但不一定限于由特定的函数表示。根据对希望的光图像进行傅立叶变换而得到的复振幅分布中提取了相位分布的分布确定旋转角度分布φ(x,y)。在根据希望的光图像求取复振幅分布时,通过应用计算全息生成时一般使用的gerchberg-saxton(gs)法等重复算法,可以提高光束图案的再现性。
[0071]
图5是表示在相位调制层的特定区域内应用了折射率大致周期结构的例子的俯视图。在图5所示的例子中,在正方形的内侧区域rin的内部形成有用于射出目标光束图案的大致周期结构(例如图3所示的结构)。另一方面,在包围内侧区域rin的外侧区域rout,在正方格子的格子点位置配置有重心位置一致的正圆形的不同折射率区域。外侧区域rout内的填充因子ff被设定为例如12%。在内侧区域rin的内部及外侧区域rout内,假想设定的正方格子的格子间距相同(=a)。在该结构的情况下,光也分布在外侧区域rout内,因此,能够抑制内侧区域rin的周边部上的光强度的急剧变化引起的高频噪声(所谓的窗函数噪声)的产生。另外,能够抑制向面内方向的光泄漏,能够期待阈值电流的降低。
[0072]
图6是说明s-ipmsel1的输出光束图案成像而得到的光图像和相位调制层15上的旋转角度分布φ(x,y)的关系的图。输出光束图案的中心q不限于位于垂直于半导体基板10的主面10a的轴线上,也可以配置于垂直的轴线上。在图6中,为了便于说明,设中心q位于垂直于主面10a的轴线上。图6中示出了以中心q为原点的四个象限。在图6的例子中,在第三象限中出现了文字“a”,在第一象限中出现了将文字“a”旋转180度后的符号。在输出光束图案为旋转对称的光图像(例如十字、圆圈、双重圆圈等)的情况下,将它们重叠并作为一个光图像进行观察。如图4所示,在使s-ipmsel1的不同折射率区域15b的重心g在格子点o周围的圆周方向上错开的情况下,如图6所示,第一象限的输出光束图案和第三象限的输出光束图案之间不存在强度差,但如下述图14所示,在使s-ipmsel1的不同折射率区域15b的重心g在穿过格子点o的直线上错开的情况下,可以使第一象限的输出光束图案和第三象限的输出光束图案之间具有强度差。
[0073]
s-ipmsel1的输出光束图案的光图像包含斑点、圆点、直线、十字架、线画、格子图案、照片、条纹状图案、cg(计算机作图)及文字中的至少一个。为了得到希望的光图像,通过以下步骤确定相位调制层15上的不同折射率区域15b的旋转角度分布φ(x,y)。
[0074]
作为第一前提条件,在由与法线方向一致的z轴和与包含多个不同折射率区域15b
的相位调制层15的一面一致的x-y平面规定的xyz正交坐标系中,将由具有正方形状的m1(1以上的整数)
×
n1(1以上的整数)个单位构成区域r构成的假想正方格子设定于x-y平面上。
[0075]
作为第二前提条件,如图7所示,设xyz正交坐标系中的坐标(ξ,η,ζ)相对于由动径的长度r、自z轴起的倾斜角θtilt、以及自xy平面上特定的x轴起的旋转角θrot规定的球面坐标(r,θrot,θtilt)满足以下式(1)~式(3)所示的关系。图7是用于说明从球面坐标(r,θrot,θtilt)向xyz正交坐标系中的坐标(ξ,η,ζ)的坐标变换的图,通过坐标(ξ,η,ζ)表现实空间、即xyz正交坐标系中设定的规定平面上的设计上的光图像。
[0076]
设相当于从s-ipmsel1输出的光图像的光束图案为朝向由角度θtilt及θrot规定的方向的亮点的集合,此时,设角度θtilt及θrot为换算成由以下式(4)规定的标准化波数、即与x轴对应的kx轴上的坐标值kx和由以下式(5)规定的标准化波数、即与y轴对应并且与kx轴正交的ky轴上的坐标值ky的角度。标准化波数是指将相当于假想正方格子的格子间距的波数2π/a标准化为1.0的波数。此时,在由kx轴及ky轴规定的波数空间内,包含相当于光图像的光束图案的特定的波数范围分别由正方形状的m2(1以上的整数)
×
n2(1以上的整数)个图像区域fr构成。整数m2无需与整数m1一致。同样,整数n2也无需与整数n1一致。式(4)及式(5)公开在例如y.kurosaka et al.,"effects of non-lasing band intwo-dimensional photonic-crystal lasers clarified using omnidirectionalband structure,"opt.express 20,21773-21783(2012)中。
[0077]
[数1]
[0078]
ξ=r sinθ
tilt
cosθ
rot
ꢀꢀ…
(1)
[0079]
[数2]
[0080]
η=r sinθ
tilt
sinθ
rot
ꢀꢀ…
(2)
[0081]
[数3]
[0082]
ζ=r cosθ
tilt
ꢀꢀ…
(3)
[0083]
[数4]
[0084][0085]
[数5]
[0086][0087]
a:假想正方格子的格子常数
[0088]
λ:s-ipmsel1的振荡波长
[0089]
作为第三前提条件,在波数空间内,以j为虚数单位,通过以下式(6)赋予将由kx轴方向的坐标分量kx(0以上m2-1以下的整数)和ky轴方向的坐标分量ky(0以上n2-1以下的整数)特定的图像区域fr(kx,ky)各自二维逆离散傅立叶变换为由x轴方向的坐标分量x(0以上m1-1以下的整数)和y轴方向的坐标分量y(0以上n1-1以下的整数)特定的x-y平面上的单位构成区域r(x,y)而得到的复振幅f(x,y)。设振幅项为a(x,y),并且设相位项为p(x,y),此时,复振幅f(x,y)由以下式(7)规定。作为第四前提条件,单位构成区域r(x,y)由分别平行于x轴及y轴且在成为单位构成区域r(x,y)的中心的格子点o(x,y)正交的s轴及t
轴规定。
[0090]
[数6]
[0091][0092]
[数7]
[0093]
f(x,y)=a(x,y)
×
exp[jp(x,y)]
ꢀ…
(7)
[0094]
在上述第一至第四前提条件下,相位调制层15构成为满足以下第五条件及第六条件。即,在单位构成区域r(x,y)内,在重心g远离格子点o(x,y)的状态下配置,由此满足第五条件。在从格子点o(x,y)到对应的重心g的线段长度r2(x,y)在m1个
×
n1个单位构成区域r的各个被设定为共同的值的状态下,将对应的不同折射率区域15b配置于单位构成区域r(x,y)内,以使连接格子点o(x,y)和对应的重心g的线段和s轴所形成的角度φ(x,y)满足如下关系,由此满足第六条件:
[0095]
φ(x,y)=c
×
p(x,y)+b
[0096]
c:比例常数且例如为180
°
/π
[0097]
b:任意常数且例如为0
[0098]
接下来,对s-ipmsel1的m点振荡进行说明。为了进行s-ipmsel1的m点振荡,可以假设假想正方格子的格子间距a、活性层12的发光波长λ及模式的等效折射率n满足λ=(√2)n
×
a的条件。图8是表示关于m点振荡的s-ipmsel的相位调制层的倒格子空间的俯视图。图中的点p表示倒格子点。图中的箭头b1表示基本倒格子矢量,箭头k1、k2、k3及k4表示四个面内波数矢量。面内波数矢量k1~k4分别具有基于旋转角度分布φ(x,y)的波数扩散sp。
[0099]
波数扩散sp的形状及大小与上述的γ点振荡的情况同样。在m点振荡的s-ipmsel1中,面内波数矢量k1~k4的大小(即面内方向的驻波的大小)小于基本倒格子矢量b1的大小。因此,面内波数矢量k1~k4与基本倒格子矢量b1的矢量的和并不为0,通过衍射,面内方向的波数也不能为0,因此,并未发生向面垂直方向(z轴方向)的衍射。这样,在m点振荡的s-ipmsel1中,并未输出向面垂直方向(z轴方向)的0次光、向相对于z轴方向倾斜的方向的1次光及-1次光。
[0100]
在本实施方式中,在m点振荡的s-ipmsel1中对相位调制层15实施如下工夫,由此,能够不输出0次光而输出1次光及-1次光的一部分。具体而言,如图9所示,通过面内波数矢量k1~k4加上具有一定的大小及方向的某个衍射矢量v,能够使面内波数矢量k1~k4中的至少一个(图中为面内波数矢量k3)的大小小于2π/λ。换言之,将加上了衍射矢量v后的面内波数矢量k1~k4中的至少一个(面内波数矢量k3)收敛于半径2π/λ的圆状区域(光线)ll内。
[0101]
在图9中,由虚线表示的面内波数矢量k1~k4表示衍射矢量v的加法运算前,由实线表示的面内波数矢量k1~k4表示衍射矢量v的加法运算后。光线ll对应于全反射条件,收敛于光线ll内的大小的波数矢量具有面垂直方向(z轴方向)的分量。在一例中,衍射矢量v的方向沿着γ-m1轴或γ-m2轴。衍射矢量v的大小在2π/(√2)a-2π/λ~2π/(√2)a+2π/λ的范围内。作为一例,衍射矢量v的大小为2π/(√2)a。
[0102]
接下来,对用于将面内波数矢量k1~k4中的至少一个收敛于光线ll内的衍射矢量
v的大小及方向进行讨论。下述数式(8)~(11)表示加上衍射矢量v之前的面内波数矢量k1~k4。
[0103]
[数8]
[0104][0105]
[数9]
[0106][0107]
[数10]
[0108][0109]
[数11]
[0110][0111]
波数矢量的扩散δkx及δky分别满足下述数式(12)及(13)。面内波数矢量的x轴方向的扩散的最大值δkxmax及y轴方向的扩散的最大值δkymax由设计的光图像的角度扩散规定。
[0112]
[数12]
[0113]-δkx
max
≤δkx≤δkx
max
ꢀ…
(12)
[0114]
[数13]
[0115]-δky
max
≤δky≤δky
max
ꢀꢀ…
(13)
[0116]
在将衍射矢量v表示为下述数式(14)时,加上衍射矢量v之后的面内波数矢量k1~k4成为下述数式(15)~(18)。
[0117]
[数14]
[0118]
v=(vx,vy)
ꢀꢀ…
(14)
[0119]
[数15]
[0120][0121]
[数16]
[0122][0123]
[数17]
[0124][0125]
[数18]
[0126][0127]
如果认为数式(15)~(18)中波数矢量k1~k4中的任一个收敛于光线ll内,则下述数式(19)的关系成立。
[0128]
[数19]
[0129][0130]
即,通过加上满足数式(19)的衍射矢量v,波数矢量k1~k4中的任一个收敛于光线ll内,1次光及-1次光的一部分被输出。
[0131]
设光线ll的大小(半径)为2π/λ的原因如下。图10是用于示意性地说明光线ll的周边结构的图。该图中示出了从垂直于z轴方向的方向观察到的器件和空气的边界。真空中的光的波数矢量的大小为2π/λ,但在光如图10那样在器件介质中传播时,折射率n的介质内的波数矢量ka的大小为2πn/λ。此时,为了使光在器件和空气的边界传播,需要使平行于边界的波数分量连续(波数守恒定律)。
[0132]
在图10中,在波数矢量ka和z轴形成角度θ的情况下,投影到面内的波数矢量(即面内波数矢量)kb的长度为(2πn/λ)sinθ。另一方面,一般根据介质的折射率n>1的关系,在介质内的面内波数矢量kb大于2π/λ的角度中,波数守恒定律并不成立。此时,光发生全反射,不能取出到空气侧。与该全反射条件对应的波数矢量的大小为光线ll的大小即2π/λ。
[0133]
作为面内波数矢量k1~k4加上衍射矢量v的具体方式的一例,考虑使与光图像无关的旋转角度分布φ2(x,y)(第二相位分布)和与光图像相应的相位分布即旋转角度分布φ1(x,y)(第一相位分布)重叠的方式。在该情况下,相位调制层15的旋转角度分布φ(x,y)被表示为φ(x,y)=φ1(x,y)+φ2(x,y)。如上述,φ1(x,y)相当于对光图像进行傅立叶变换时的复振幅的相位。φ2(x,y)为用于加上满足上述数式(19)的衍射矢量v的旋转角度分布。
[0134]
图11是概念性地表示旋转角度分布φ2(x,y)的一例的图。在该图的例子中,第一相位值φa和与第一相位值φa不同的值的第二相位值φb排列成方格花纹。在一例中,相位值φa为0(rad),相位值φb为π(rad)。在该情况下,第一相位值φa和第二相位值φb针对每一π变化。通过这种相位值的排列,能够优选实现沿着γ-m1轴或γ-m2轴的衍射矢量v。在排列成方格花纹的情况下,v=(
±
π/a,
±
π/a),衍射矢量v和图8的波数矢量k1~k4恰好抵消。此外,衍射矢量v的角度分布θ2(x,y)由衍射矢量v(vx,vy)和位置矢量r(x,y)的内积表示。即,衍射矢量v的角度分布θ2(x,y)由θ2(x,y)=v
·
r=vxx+vyy表示。
[0135]
在上述实施方式中,在基于光图像的角度扩散的波数扩散包含在以波数空间上的某点为中心的半径δk的圆中的情况下,也可以简单地认为:通过四方向的面内波数矢量k1~k4加上衍射矢量v,使四方向的面内波数矢量k1~k4中的至少一个的大小小于2π/λ(光线ll)。也可以认为:通过从四方向的面内波数矢量k1~k4中去除波数扩散δk再加上衍射矢量v,使四方向的面内波数矢量k1~k4中的至少一个的大小小于从2π/λ中扣除波数扩散δk之后的值{(2π/λ)-δk}。
[0136]
图12是概念性地表示上述状态的图。如该图所示,如果去除了波数扩散δk的面内
波数矢量k1~k4加上衍射矢量v,则面内波数矢量k1~k4中的至少一个的大小小于{(2π/λ)-δk}。在图12中,区域ll2为半径{(2π/λ)-δk}的圆状区域。在图12中,由虚线表示的面内波数矢量k1~k4表示衍射矢量v的加法运算前,由实线表示的面内波数矢量k1~k4表示衍射矢量v的加法运算后。区域ll2对应于考虑了波数扩散δk的全反射条件,收敛于区域ll2内的大小的波数矢量也沿面垂直方向(z轴方向)传播。
[0137]
在本方式中,对用于将面内波数矢量k1~k4中的至少一个收敛于区域ll2内的衍射矢量v的大小及方向进行说明。下述数式(20)~(23)表示加上衍射矢量v之前的面内波数矢量k1~k4。
[0138]
[数20]
[0139][0140]
[数21]
[0141][0142]
[数22]
[0143][0144]
[数23]
[0145][0146]
在此,在将衍射矢量v表示为上述的数式(14)时,加上衍射矢量v之后的面内波数矢量k1~k4为下述数式(24)~(27)。
[0147]
[数24]
[0148][0149]
[数25]
[0150][0151]
[数26]
[0152][0153]
[数27]
[0154]
[0155]
在数式(24)~(27)中,如果认为面内波数矢量k1~k4中的任一个收敛于区域ll2内,则下述数式(28)的关系成立。即,通过加上满足数式(28)的衍射矢量v,去除了波数扩散δk的面内波数矢量k1~k4中的任一个收敛于区域ll2内。即使在这种情况下,也可以不输出0次光而输出1次光及-1次光的一部分。
[0156]
[数28]
[0157][0158]
图13是变形例的相位调制层的俯视图。图14是表示变形例的相位调制层上的不同折射率区域的位置关系的图。如图13及图14所示,变形例的相位调制层15的各不同折射率区域15b的重心g配置于直线d上。直线d为穿过与各单位构成区域r对应的格子点o,相对于正方格子的各边倾斜的直线。即,直线d为相对于x轴及y轴双方倾斜的直线。针对正方格子的一边(x轴)的直线d的倾斜角为θ。
[0159]
倾斜角θ在相位调制层15b内一定。倾斜角θ满足0
°
<θ<90
°
,在一例中为θ=45
°
。或者,倾斜角θ满足180
°
<θ<270
°
,在一例中为θ=225
°
。在倾斜角θ满足0
°
<θ<90
°
或180
°
<θ<270
°
的情况下,直线d从由x轴及y轴规定的坐标平面的第一象限延伸至第三象限。倾斜角θ满足90
°
<θ<180
°
,在一例中为θ=135
°
。或者,倾斜角θ满足270
°
<θ<360
°
,在一例中为θ=315
°
。在倾斜角θ满足90
°
<θ<180
°
或270
°
<θ<360
°
的情况下,直线d从由x轴及y轴规定的坐标平面的第二象限延伸至第四象限。这样,倾斜角θ成为除0
°
、90
°
、180
°
及270
°
外的角度。
[0160]
在此,设格子点o和重心g的距离为r(x,y)。x为x轴上的第x个格子点的位置,y为y轴上的第y个格子点的位置。在距离r(x,y)为正值的情况下,重心g位于第一象限(或第二象限)。在距离r(x,y)为负值的情况下,重心g位于第三象限(或第四象限)。在距离r(x,y)为0的情况下,格子点o和重心g相互一致。倾斜角度优选为45
°
、135
°
、225
°
、275
°
。在这些倾斜角度中,仅形成m点的驻波的四个波数矢量(例如面内波数矢量(
±
π/a、
±
π/a))中的两个被相位调制,其余两个未被相位调制,因此,能够形成稳定的驻波。
[0161]
根据与希望的光图像相应的相位图案,针对每一不同折射率区域15b个别地设定各不同折射率区域的重心g和与各单位构成区域r对应的格子点o的距离r(x,y)。相位图案即距离r(x,y)的分布针对每一由x、y的值确定的位置具有特定的值,但不一定必须由特定的函数表示。根据对希望的光图像进行逆傅立叶变换而得到的复振幅分布中的提取了相位分布的分布确定距离r(x,y)的分布。
[0162]
如图14所示,在某坐标(x,y)处的相位p(x,y)为p0的情况下,将距离r(x,y)设定为0。在相位p(x,y)为π+p0的情况下,将距离r(x,y)设定为最大值r0。在相位p(x,y)为-π+p0的情况下,将距离r(x,y)设定为最小值-r0。针对中间相位p(x,y)取距离r(x,y),以使r(x,y)={p(x,y)-p0}
×
r0/π。初始相位p0可以任意设定。
[0163]
如果设假想正方格子的格子间距为a,则r(x,y)的最大值r0处于例如下述式(29)的范围内。在根据希望的光图像求取复振幅分布时,通过应用计算全息生成时一般使用的gerchberg-saxton(gs)法等重复算法,可以提高光束图案的再现性。
[0164]
[数29]
[0165][0166]
在本方式中,通过确定相位调制层15的不同折射率区域15b的距离r(x,y)的分布,能得到希望的光图像。在与上述实施方式同样的第一至第四前提条件下,相位调制层15构成为满足以下条件。即,将对应的不同折射率区域15b配置于单位构成区域r(x,y)内,以使从格子点o(x,y)到对应的不同折射率区域15b的重心g的距离r(x,y)满足如下关系:
[0167]
r(x,y)=c
×
(p(x,y)-p0)
[0168]
c:比例常数且例如为r0/π
[0169]
p0:任意常数且例如为0
[0170]
在某坐标(x,y)处的相位p(x,y)为p0的情况下,距离r(x,y)被设定为0。在相位p(x,y)为π+p0的情况下,距离r(x,y)被设定为最大值r0。在相位p(x,y)为-π+p0的情况下,距离r(x,y)被设定为最小值-r0。在想要得到希望的光图像的情况下,对该光图像进行逆傅立叶变换,并将与该复振幅的相位p(x,y)相应的距离r(x,y)的分布赋予多个不同折射率区域15b即可。相位p(x,y)和距离r(x,y)也可以相互成比例。
[0171]
在本方式中,也与上述的实施方式同样,假想正方格子的格子间距a和活性层12的发光波长λ满足m点振荡的条件。在相位调制层15上考虑倒格子空间时,分别包含基于距离r(x,y)的分布的波数扩散的四方向的面内波数矢量中的至少一个的大小可以小于2π/λ(光线)。
[0172]
在本方式中,通过在于m点振荡的s-ipmsel1中对相位调制层15实施如下工序,未将0次光输出到光线内而是输出1次光及-1次光的一部分。具体而言,如图9所示,通过面内波数矢量k1~k4加上具有一定的大小及方向的某衍射矢量v,能够使面内波数矢量k1~k4中的至少一个的大小小于2π/λ。即,将加上衍射矢量v之后的面内波数矢量k1~k4中的至少一个收敛于半径2π/λ的圆状区域(光线)ll内。通过加上满足上述的数式(19)的衍射矢量v,面内波数矢量k1~k4中的任一个收敛于光线ll内,1次光及-1次光的一部分被输出。
[0173]
如图12所示,通过从四方向的面内波数矢量k1~k4中去除波数扩散δk(即m点振荡的正方格子pcsel中的四方向的面内波数矢量)再加上衍射矢量v,可以使四方向的面内波数矢量k1~k4中的至少一个的大小小于从2π/λ中扣除波数扩散δk后的值{(2π/λ)-δk}。即,通过加上满足上述的数式(28)的衍射矢量v,面内波数矢量k1~k4中的任一个收敛于区域ll2内,1次光及-1次光的一部分被输出。
[0174]
作为面内波数矢量k1~k4加上衍射矢量v的具体方式的一例,考虑使与光图像无关的距离分布r2(x,y)(第二相位分布)和与光图像相应的相位分布即距离分布r1(x,y)(第一相位分布)重叠的方式。在该情况下,相位调制层15的距离分布r(x,y)被表示为:
[0175]
r(x,y)=r1(x,y)+r2(x,y)。
[0176]
如上述,r1(x,y)相当于对光图像进行傅立叶变换时的复振幅的相位。r2(x,y)为用于加上满足上述数式(19)或数式(28)的衍射矢量v的距离分布。距离分布r2(x,y)的具体例与图11同样。
[0177]
[三维测量装置的第一实施方式]
[0178]
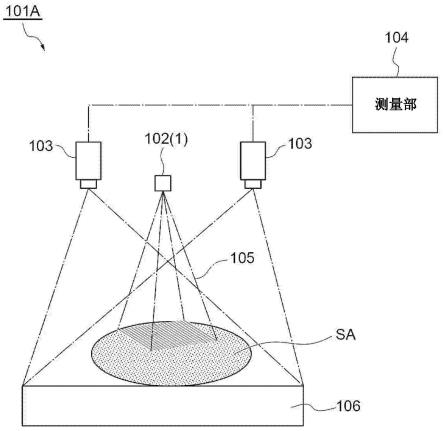
图15是表示第一实施方式的三维测量装置101a的结构的概略图。如该图所示,三维测量装置101a包含单体的光源部102、多个(一对)摄像部103、测量部104而构成。光源部
102由上述的m点振荡的s-ipmsel1构成。从光源部102射出的测量光105被照射到工作台106上载置的被测量物sa的表面的一定区域。工作台106也可以为可沿二维方向或三维方向扫描的扫描工作台。在测量光105的照射范围相对于被测量物sa的测定范围充分大的情况下,也可以省略工作台106的配置。
[0179]
在本实施方式中,测量光105的规定图案为由圆点图案、条形图案及格子图案中的任一个构成的周期图案w1。在图16的例子中,测量光105的周期图案w1为100
×
100像素的图像区域所表示的周期圆点图案。在该圆点图案中,圆点呈矩阵状排列,圆点周期纵横共为5像素周期。图17是表示周期图案的远场图像的一例的图。图17(a)是40
×
40圆点的远场图像,图17(b)是60
×
60圆点的远场图像,图17(c)是80
×
80圆点的远场图像,图17(d)是120
×
120圆点的远场图像。光源部102的驱动条件为电流0.5a、脉冲宽度50ns、脉冲间隔5μs、温度25℃。图的中心为测量光105的面垂直方向的中心,图中的定标线条对应于15
°
。这些图中表示的远场图像被设计成在平面屏幕中各圆点呈矩阵状排列,远离中心的部分的排列的畸变是由测定系统的光学系统引起的。
[0180]
摄像部103由对从光源部102射出的测量光105具有灵敏度的装置构成。作为摄像部103,可使用例如ccd(charge coupled device)摄像头、cmos(complementary mos)摄像头、其它二维图像传感器等。摄像部103对被照射了测量光105的状态的被测量物sa进行摄像,将表示摄像结果的输出信号输出到测量部104中。
[0181]
测量部104由包含例如处理器、存储器等而构成的计算机系统构成。测量部104通过处理器执行各种控制功能。作为计算机系统,可举出例如个人计算机、微型计算机、云服务器、智能器件(智能手机、平板终端等)等。测量部104可以由plc(programmable logic controller)构成,也可以由fpga(field-programmable gate array)等集成电路构成。
[0182]
测量部104与摄像部103可通信地连接,基于从摄像部103输入的输出信号实施被测量物sa的三维形状测量。在本实施方式中,测量部104基于使用周期图案w1的主动立体声法测量被测量物sa的三维形状。在此,作为一例,示出了基于平行等位立体声原理的三维形状测量法。设一对摄像部103、103的视差为d,设一对摄像部103、103之间的距离为b,设一对摄像部103、103的焦距为f,设从一对摄像部103、103到被测量物sa的距离为z,在该情况下,视差d被赋予d=(f/z)b。摄像部103、103之间的距离b及摄像部103、103的焦距均为固有的值,因此,通过求取视差d,能够求出距被测量物sa的距离z。
[0183]
在本实施方式中,具有周期图案w1的测量光105被照射到被测量物sa上。此时,可以通过测量部104判别由摄像部103、103各自摄像的周期图案w1的同一点。另外,可进行被动立体声法中成为技术问题的、使用纹理少的图像的三维测量、暗部处的三维测量。通过使用以周期圆点为代表的周期图案w1,抑制测量光105的图案密度的偏差,可抑制测量光105的照明位置导致的测量精度的不均。
[0184]
在本实施方式中,也可以使用例如图18所示的随机圆点图案w2来代替周期图案w1。随机圆点图案w2为使图16所示的圆点图案的各圆点从格子点的位置在基本周期区域(由垂直于相邻的格子点间的中点的线段包围的矩形区域)的范围内呈二维随机位移的图案。作为一例,可以对位于格子点的圆点分别分配随机数φ(ix,iy),并基于该随机数φ,使各圆点从格子点的位置位移。
[0185]
在该情况下,随机圆点图案w2具有伪周期,因此,抑制测量光105的图案密度的偏
差,可抑制测量光105的照明位置导致的测量精度的不均。另外,通过使用随机圆点图案w2而非周期圆点图案,能够抑制通过不同的摄像部103对圆点图案的同一点进行摄像时的误识别。因此,能够提高视差d的测量精度,可以提高三维形状测量的精度。
[0186]
在本实施方式中,也可以使用图19所示的具有均匀密度的图案w3来代替周期图案w1。来自s-ipmsel1的射出光为激光,因此,在散射光中可能出现散斑。另外,在相位计算中,有时也会发生意外的散斑状噪声的混入。因此,即使在使用具有均匀密度的图案w3的情况下,也会在测量光105的图案中形成随机圆点图案。通过使用该随机圆点图案,能够抑制通过不同的摄像部103对圆点图案的同一点进行摄像时的误识别。
[0187]
图20是表示具有均匀密度的图案w3的ffp(far field pattern)的一例的图。在该图的例子中,设测量光105的脉冲宽度为50ns,设重复间隔为5μs,在常温下观测ffp。另外,进行亮度+40%、对比度-40%的色调修正。在该图中,可确认,即使在使用具有均匀密度的图案w3的情况下,也会在测量光105的图案中形成随机圆点图案。
[0188]
在图15的例子中,三维测量装置101a具备单体的光源部102,但三维测量装置101a也可以具备多个光源部102。在该情况下,通过将来自各光源部102的测量光105照射到被测量物sa的不同区域,能够扩大测量区域而不进行工作台106的扫描。在采用该结构的情况下,可以省略工作台106的配置。
[0189]
[三维测量装置的第二实施方式]
[0190]
图21是表示第二实施方式的三维测量装置的结构的概略图。如该图所示,第二实施方式的三维测量装置101b包含多个光源部102、单体的摄像部103、测量部104而构成。摄像部103、光源部102及测量部104的结构与第一实施方式同样。在本实施方式中,测量光105的规定图案为格雷码图案,测量部104基于使用格雷码图案的三角测量法测量被测量物sa的三维形状。
[0191]
图22是表示格雷码图案的一例的图。在该图的例子中,设摄像部103的像素为nx
×
ny,关于x方向示出了该像素。如果设x方向的像素位置n(n为0~nx-1的整数)为mx位的二进制数,则格雷码图案w4由对象数的二进制表示与将该对象数的二进制表示向右位移1位且其前带0的数的异或表示。即,如果设对象数为n,则格雷码图案w4由与n^(n>>1)的逻辑表达式表达。在图22的例子中,表示4位(4图案)的情况下的格雷码图案w4a~w4d。为了生成格雷码图案w4,可使用例如opencv等。
[0192]
在格雷码中,相邻的像素的汉明距离为1。汉明距离是指比较位数相同的两个值时,位于对应的位置的不同值的位的个数。因此,在汉明距离为1的格雷码中,即使在复原位流时发生位错的情况下,误差也收敛于1。在单纯的二进制代码中,上位位产生差错的情况下的位置的误差增大,但在格雷码中,可得到噪声大的符号。
[0193]
在使用格雷码的情况下,光源部102的配置数为与二进制数的各位对应的图案的数量即可。即,格雷码图案w4a~w4d由从最上位位到最下位位的各位的各像素的0,1被设定为互不相同的多个条纹状的图案构成。在光源部102中依次切换从最上位位的格雷码图案w4a到最下位位的格雷码图案w4d的各图案,同时通过摄像部103进行摄像,在该情况下,通过mx次摄像可得到值x。可知,基于该值x测量第x个像素的位置。y方向也同样,通过依次切换格雷码图案w4a~w4d,同时通过摄像部103进行摄像,通过my次摄像可得到值y。可知,基于该值y测量第y个像素的位置。
[0194]
为了避免被测量物sa的表面的颜色导致的误识别,图22所示的格雷码图案w4a~w4d也可以与黑白反转的格雷码图案一同使用。在该情况下,设光源部102的配置数为2mx+2my即可。
[0195]
在本实施方式中,例如,如图23所示,也可以使用正弦波状的条形图案w5来代替格雷码图案w4。图23所示的正弦波状的条形图案w5为100
×
100像素的图像区域所表示的周期条形图案。正弦波状的条形图案w5的周期为20像素周期。测量部104基于使用正弦波状的条形图案w5的相移法测量被测量物sa的三维形状。在该方式中,使用例如分别被施加针对格子节距等分1周期量的相移(错位)的多个正弦波状的条形图案w5。就相移的图案而言,准备相位按2π/n(n为整数)偏移的图案即可。
[0196]
在此,例示了使用具有不同相移的四个正弦波状的条形图案w5的情况。将具有四个正弦波状的条形图案w5的测量光105的光强度分别设为i0~i3,设摄像部103的像素为(x,y),此时,被测量物sa的表面上的光强度i0~i3由下述式(30)~(33)表示。ia(x,y)为格子花纹的振幅,ib(x,y)为背景强度,θ(x,y)为初始相位。
[0197]
[数30]
[0198]
i0=ia(x,y)cos{θ(x,y)}+ib(x,y)
ꢀꢀ…
(30)
[0199]
[数31]
[0200]
i1=ia(x,y)cos{θ(x,y)+π/2}+ib(x,y)
ꢀꢀ…
(31)
[0201]
[数32]
[0202]
i2=ia(x,y)cos{θ(x,y)+π}+ib(x,y)
ꢀꢀ…
(32)
[0203]
[数33]
[0204]
i3=ia(x,y)cos{θ(x,y)+3π/2}+ib(x,y)
…
(33)
[0205]
初始相位θ能够通过tanθ=-(i3-i1)/(i2-i0)而求得。在正弦波状的条形图案w5的相移数为n的情况下,初始相位θ能够通过下述式(34)求得。
[0206]
[数34]
[0207][0208]
在使用这种相移法的情况下,通过对所测量的相位进行高度换算,能够以小于正弦波状的条形图案w5的节距的间隔测量被测量物sa的高度。在三维测量装置101b的结构中,也可以沿正弦波状的条形图案w5中的平行于条纹的方向排列光源部102。在该情况下,可以消除光源部102的错位导致的相移,能够消除多个正弦波状的条形图案w5各自的初始相位的偏移。
[0209]
在本实施方式中,也可以沿相互正交的二轴方向排列光源部102。在该情况下,通过针对每一轴切换测量光105的接通断开,能够通过2轴获取被测量物sa的高度曲线。例如,如图24所示,也可以使用在相互正交的二轴方向上呈正弦波状变化的矩阵图案w6来代替正弦波状的条形图案w5。在使用这种矩阵图案w6的情况下,能够沿2轴方向同时测量被测量物sa的高度曲线。
[0210]
在本实施方式中,多个光源部102也可以分别输出周期互不相同的正弦波状的条形图案w5。在上述的相移法中,相位2π下的不连续性成为技术问题。与此相对,在使用周期互不相同的正弦波状的条形图案w5的情况下,例如,如图25所示,通过选择在所有频率下一致的坐标,可以改善相位2π下的不连续性,能够通过少数图案实现高精度的三维测量。通过改善相位2π下的不连续性,能够实现三维形状测量的测量范围的扩散或凹凸显著的被测量物sa的高精度测量。
[0211]
在本实施方式中,测量部104也可以基于使用正弦波状的条形图案w5的采样莫尔法测量被测量物sa的三维形状。在采样莫尔法中,利用被投影到被测量物sa的表面的正弦波状的条形图案w5的格子根据被测量物sa的高度发生变形。在此,在由摄像部103摄像的图像中,预先调整为基准面的高度下的相移数n的一个正弦波图案的条纹间隔对应于摄像头的n像素。在此,设相移数n为4。照射一个正弦波图案,针对每一n=4像素对摄像部103的像素进行采样,由此,如图26(a)所示,可得到针对每4像素摄像的(摄像像素间的3像素被稀疏化)四个图案p1~p4。在这些图案p1~p4间,摄像像素针对每1像素发生位移,对摄像像素的亮度值进行线性互补,由此,如图26(b)所示,可得到相位相互位移后的莫尔条纹图案m1~m4。通过使用这些莫尔条纹图案m1~m4并应用上述的相移法,能够以小于正弦波状的条形图案w5的节距的间隔测量被测量物sa的高度。与上述相移法相比,根据这种方法,能够使所照射的正弦波图案的数量减少,能够使光源部102紧凑。
[0212]
在本实施方式中,例如,如图27所示,也可以使用使正弦波状的条形图案w5和随机圆点图案w2重叠的重叠图案w7来代替正弦波状的条形图案w5。通过使用这种重叠图案w7,能够以小于正弦波状的条形图案w5的节距的间隔测量被测量物sa的高度。另外,通过将随机圆点图案组合,可以改善相位2π下的不连续性,能够通过少数图案实现高精度的三维测量。如图28所示,重叠图案也可以为使呈正弦波状变化的矩阵图案w6和随机圆点图案w2重叠的重叠图案w8。在该情况下,除上述效果外,能够沿2轴方向同时测量被测量物sa的高度曲线。
[0213]
在本实施方式中,也可以使用正弦波状的条形图案w5及格雷码图案w4双方。在该情况下,测量部104基于使用正弦波状的条形图案w5的相移法及使用格雷码图案w4的三角测量法测量被测量物sa的三维形状。在该情况下,能够通过使用格雷码图案w4的三角测量法进行像素等级的测量,通过使用正弦波状的条形图案w5的相移法进行子像素等级的测量。另外,通过使用格雷码,可以改善相位2π下的不连续性,能够通过少数图案实现高精度的三维测量。
[0214]
[三维测量装置的第三实施方式]
[0215]
图29是表示第三实施方式的三维测量装置的结构的概略图。如该图所示,第三实施方式的三维测量装置101c包含多个光源部102、多个(一对)摄像部103、测量部104而构成。摄像部103、光源部102及测量部104的结构与第一实施方式同样。在本实施方式中,测量光105的规定图案为正弦波状的条形图案w5,测量部104基于使用正弦波状的条形图案w5的相移法及主动立体声法测量被测量物sa的三维形状。
[0216]
在本实施方式中,通过对所测量的相位进行高度换算,能够以小于正弦波状的条形图案w5的节距的间隔测量被测量物sa的高度。另外,通过将使用多个摄像部103的主动立体声法组合,可以改善相位2π下的不连续性,能够通过少数图案实现高精度的三维测量。在
使用主动立体声法的情况下,也可以一边切换上述的圆点图案一边使用。
[0217]
[基于s-ipmsel的正弦波状的条形图案的相移]
[0218]
在s-ipmsel1中,除所设计的1次光外,关于射出面的法线对称的-1次光也被输出(参照图6)。因此,在进行正弦波状的条形图案w5的相移的情况下,考虑
±
1次光重叠的正弦波,此时,条纹在1次光和-1次光之间位移的方向发生反转,图案可能偏离设计。为了使说明简单化,考虑条纹向x轴方向的位移,此时,1次光的复振幅由下述式(35)表示。-1次光的复振幅为在相对于面法线与1次光对称的位置射出的光的复振幅,由下述式(36)表示。式中,k(=kx、ky,kz)为波数矢量(大小2π/λ),λ为波长,ω为光的各频率,δθ为相移,a1为1次光振幅(相对于理想相位分布,实际的孔配置的相位分布引起的分量),k为正弦波的条纹的波数(=2π/λ(λ为正弦波的周期)),θ为正弦波的相移量,(x,y,z)为投影光束的坐标。
[0219]
[数35]
[0220]
a1=a1cos(kx+θ)exp{j(ωt-k
x
x-kyy-kzz)}
…
(35)
[0221]
[数36]
[0222]
a-1
=a-4
1cos(kx+θ)exp{j(ωt+k
x
x+kyy-kzz)}
…
(36)
[0223]
此时,能够基于1次光及-1次光的振幅,通过下述式(37)求出合成振幅a。
[0224]
[数37]
[0225]
a=cos(kx+θ){a1exp[j{ωt-k
z-(k
x
x+kyy)}]+a-1
exp[j{ωt-kzz+(k
x
x+kyy)}]}
…
(37)
[0226]
实际的光强度与合成振幅a的平方成比例,因此,能够通过下述式(38)求得。
[0227]
[数38]
[0228][0229]
基本光波的周期充分小于正弦波的周期(λ<<λ)。因此,基本光波的波数k充分大于正弦波的条纹的波数k(k>>k)。因此,也认为,在上述式(38)中,可以将与k的变化对应的项平均化。在该情况下,将
±
1次光重叠后的光的强度i能够通过下述式(39)近似。
[0230]
[数39]
[0231][0232]
根据这些式子可知,在进行正弦波状的条形图案w5的相移的情况下,即使
±
1次光重叠,条纹也维持着正弦波形状进行位移。另外可知,在
±
1次光重叠的正弦波图案中,实际上得到的光强度(
±
1次光的振幅的和的平方)的条纹的间隔相对于设计图案(1次光振幅)减半,相移量相对于1周期成为2倍。因此,在例如最终得到的光强度下实现π/2的相移的情况下,设1次光振幅的相移量的设计值为π/4即可。在2轴方向上具有周期的正弦波状的矩阵图案w6也同样。
[0233]
如图4所示,在通过使s-ipmsel1中的不同折射率区域15b的重心g在格子点o周围的圆周方向上偏移而形成的情况下,1次光及-1次光的振幅a成为相等的值。另一方面,如图14所示,在通过使s-ipmsel1中的不同折射率区域15b的重心g穿过格子点o且在相对于正方格子的各边倾斜的直线d上偏移而形成的情况下,1次光及-1次光的振幅a成为互不相
同的值。即使在任一情况下,也可使用
±
1次光重叠的正弦波图案。
[0234]
在1次光及-1次光为非对称的图案的情况下,如果1次光和-1次光重叠,则存在不能得到所设计的图案的问题。作为这种问题的一例,可举出具有1次光的每一亮点的结构为非对称的扩散,设计图案变得模糊。在该情况下,将1次光的射出区域限定为立体角为π的区域即可。例如,在将1次光的射出区域限定为第一象限及第二象限的情况下,-1次光的射出区域为第四象限及第三象限,因此,能够避免1次光和-1次光重叠。由此,能够抑制1次光和-1次光的重叠导致的亮点的扩散。在通过相移法使格子图案位移的情况下,-1次光的位移方向相对于1次光的位移方向反转。因此,优选的是,使通过相移运算得到的相位与1次光及-1次光各自的射出区域一同反转。另一方面,即使在未产生上述问题的情况下,也可得到1次光及-1次光未重叠且噪声少的图像,在该情况下,可以不重叠地分别使用
±
1次光的投影区域。
[0235]
[光源部及摄像部的配置例]
[0236]
图30是表示光源部及摄像部的配置例的概略立体图。如图30所示,在构成三维测量装置101时,光源部102及摄像部103可以配置于立体物111的表面。立体物111构成相当于三维测量装置101a~101c的探针的部分。立体物111由例如金属或树脂形成为圆筒形状。立体物111可以具有刚性,也可以具有可挠性。立体物111可以具有内部空间。
[0237]
光源部102及摄像部103沿周向分别以一定间隔(在此为45
°
的相位角)配置于圆筒形状的立体物111的周面111a。在图30的例子中,一摄像部103组、光源部102组、另一摄像部103组以一定间隔从立体物111的前端侧配置至基端侧。在从长边方向观察立体物111的情况下,一摄像部103、光源部102、另一摄像部103排成一列,这些组构成针对被测量物sa的一个测量区域。在立体物111具有内部空间的情况下,针对光源部102及摄像部103的配线等可以收容于该内部空间。光源部102和摄像部103的配置间隔也可以不为等间隔。在涵盖针对被测量物sa的测定范围的情况下,单体的光源部102和单体的摄像部103也可以配置于立体物111。
[0238]
图31是表示光源部及摄像部的另一配置例的概略立体图。在图31的例子中,立体物121形成球形状,设置于例如圆筒形状的支承部122的前端部分。光源部102及摄像部103在经度方向上分别以一定间隔(在此为45
°
的相位角)配置于球形状的立体物121的球面121a。一摄像部103组、光源部102组、另一摄像部103组沿立体物121的纬度方向以一定间隔配置。沿立体物121的经度方向排列的一摄像部103、光源部102、另一摄像部103组构成针对被测量物sa的一个测量区域。在立体物121具有内部空间的情况下,针对光源部102及摄像部103的配线等也可以收容于该内部空间。与图30的情况同样,光源部102和摄像部103的配置间隔也可以不为等间隔。在涵盖针对被测量物sa的测定范围的情况下,单体的光源部102和单体的摄像部103也可以配置于立体物121。
[0239]
根据如上结构,能够将配置有光源部102及摄像部103的立体物111、121构成为三维测量装置101的探针。通过使用这种立体物111、121,能够使光源部102及摄像部103各自的组朝向互不相同的方向,因此,可以以大的立体角实施被测量物sa的三维形状测量。另外,容易应用于例如口腔检查、内窥镜检查、管的内部或壁的间隙等狭窄部位的检查、家具或装置等自地板下面的检查等用途,或者构筑手持式三维测量装置。
[0240]
图23中示出了正弦波状的条形图案w5,但在形成该条形图案时,重要的是降低相
邻的图案间的噪声(亮度波动)。也认为相邻的图案间的噪声成为例如应用相移法时的位置波动的主要原因,对测定精度造成影响。因此,在实现考虑了相邻的图案间的降噪的条形图案的形成时,例如,如图32所示,可采用将射出一维多点图案的s-ipmsel1和一维透镜51组合的结构。
[0241]
在图32的例子中,一维透镜51为一维凹透镜52。一维凹透镜52的介质例如为玻璃。一维凹透镜52的一面52a为平坦面,另一面52b为凹面。一维凹透镜52以一面52a朝向s-ipmsel1的状态配置于s-ipmsel1的表面(激光的射出面)。一维凹透镜52也可以与sipmsel1的表面耦合,并与s-ipmsel1一体化。一维凹透镜52的透镜相位通过下述式(40)求出。在下述式(40)中,φ为透镜相位,λ为透镜介质中的激光的波长,f为焦距。
[0242]
[数40]
[0243][0244]
在图32及图33(a)的例子中,来自s-ipmsel1的多点图案的激光la在x方向上以规定的间隔排列。在图32的例子中,一维凹透镜52被配置为凹面沿x轴方向延伸。通过了一维凹透镜52的多点图案的激光la在x轴方向上未发生变化,仅在y轴方向上扩散。因此,通过使多点图案的激光la穿过一维凹透镜52,如图33(b)所示,可得到在y方向上扩散后的线状激光lb沿x轴方向排列的条形图案w11。
[0245]
在使条形图案进一步接近正弦波状的情况下,例如,如图34(a)所示,形成多点图案的激光la,将各激光的亮度控制成关于x轴方向成为正弦波状。通过使这种多点图案的激光la穿过一维凹透镜52,在图34(b)所示的条形图案w12中,成为在y方向上扩散后的线状激光lb沿x轴方向排列,并且各激光lb的亮度关于x轴方向呈正弦波状变化的状态。
[0246]
在图33(a)及图34(a)中,多点图案的激光la沿x轴方向排列成一直线状,但各激光la也可以不排列成一直线状,也可以沿y轴方向周期或随机偏移。一维透镜51只要是能够使多点图案的激光la沿一维方向扩散的透镜即可,不限于一维凹透镜52,也可以为作为直线发生器发挥作用的鲍威尔透镜或线性透镜。一维透镜51可以为例如菲涅尔透镜、微透镜、金属透镜等平板透镜。
[0247]
在使用金属透镜的情况下,可以采用例如图35(a)所示的共振型金属透镜结构53a,也可以采用例如图35(b)所示的折射率调制型金属透镜结构53b。如图35(a)所示,在采用共振型金属透镜结构53a的情况下,金属透镜结构53a的构成材料为具有折射率高于成为基底的层的材料。在例如成为基底的层(例如防反射膜19)为sin的情况下,作为金属透镜结构53a的构成材料,可使用非晶硅。基于由上述的式(40)求得的透镜相位设定构成金属透镜结构53a的单位格子的高度及直径。
[0248]
如图35(b)所示,在采用折射率调制型金属透镜结构53b的情况下,能够通过s-ipmsel1的表面的蚀刻形成金属透镜结构53b。例如,在s-ipmsel1的表面,通过蚀刻形成从成为最表面的层(例如防反射膜19)到其下层(例如半导体基板10)的中途的孔部54,从而能够形成折射率调制型金属透镜结构53b。基于由上述的式(40)求得的透镜相位设定构成金属透镜结构53b的各孔部54的深度及直径。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1