一种用于基桩完整性检测多通道环形阵列成像方法
1.本发明涉及材料结构损伤探测领域,尤其涉及一种用于基桩完整性检测多通道环形阵列成像方法。
背景技术:
2.随着土木工程施工工艺的进步和发展,桩基础作在高层建筑、重型厂房及港口码头等工程中得到广泛运用。目前,常用的基桩无损检测方法有静载法、高应变法及超声波法等。静载法和高应变法因效率低、检测误差相对较大且易于破坏基桩,在工程检测中受到较大限制。相比之下,超声波法和低应变法因检测便捷、准确率高、成本相对较低的优势而被普遍使用。
3.基于平截面假定的一维波动理论,旧有的应力波反射法的理论基础将桩简化为一维杆件,仅在桩顶放置单个加速度传感器接收敲击产生的声波信号,因此仅能得到一维的时域曲线与频响曲线,在进行缺陷定位时精度较低,对于特殊缺陷产生微弱反射波捕捉能力较差,易受高频杂波干扰。同时所得的信号对于检测人员的经验要求较高,成像结果不直观,极易造成缺陷的误判漏判。
技术实现要素:
4.针对现有技术中存在不足,本发明提供了一种用于基桩完整性检测多通道环形阵列成像方法,解决目前商用基桩检测仪器仅能得到一维的时域曲线与频响曲线,造成缺陷定位精度低的技术问题。
5.本发明是通过以下技术手段实现上述技术目的的。
6.一种用于基桩完整性检测多通道环形阵列成像方法,包括:
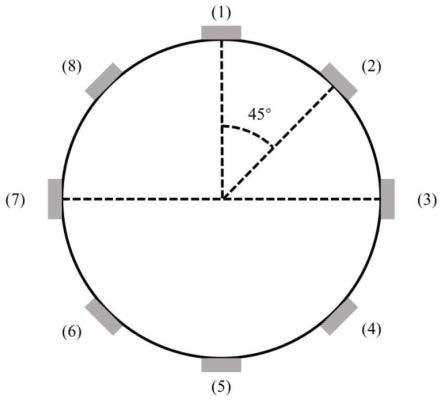
7.s01:若干加速度传感器沿周向均布成环形粘贴于基桩侧面,将所述加速度传感器与基于fpga的多通道阵列接收装置连接,组成多通道环形阵列成像检测平台,所述环形的大小根据基桩的周长变化,所述加速度传感器用于采集桩基结构中的损伤信号;
8.s02:通过尼龙锤激多次敲击励桩基顶部获得多通道反射时域信号,采集重复性高的时域信号;
9.s03:利用多通道信号耦合算法,将所述多通道环形阵列成像检测平台获得的时域信息进行同相位叠合得到时域增强信号,实现一维损伤定位检测;
10.s04:通过基于fpga的多通道阵列接收装置内部的hht分模态处理算法对步骤s02得到的重复性高的时域信号进行hht,得到一个时间—频率—能量的三维hilbert谱图,应用环形阵列成像算法,得出基桩三维成像图,通过所述三维成像图定量显示桩身缺陷类型、位置。
11.进一步的,所述加速度传感器的个数为八个。
12.进一步的,所述加速度传感器通过黄油粘贴于基桩侧面。
13.进一步的,所述步骤s04中进行hht的具体步骤为:通过emd方法将步骤s02得到的
重复性高的时域信号分解为若干个imf分量,再进行hilbert变换,导出时间—频率—能量的三维hilbert时频谱。
14.进一步的,所述步骤s04中应用环形阵列成像算法,得出基桩三维成像图具体为:
15.将hilbert谱图频率轴转化为以一个所述加速度传感器所在位置作为基点,各其他所述加速度传感器围绕该压电片进行偏转,时间轴转化为波传播的距离,能量大小通过灰度值展示,得到距离-环形周长-振幅多通道环形阵列偏转灰度图;
16.通过分析步骤s03中一维损伤定位检测结果,识别桩底,根据已有波速计算桩长,并建立与桩身长度相同的圆柱体模型;
17.将所述灰度图耦合于所述圆柱体模型之上,所述灰度图中x轴方向与所述圆柱体模型长度方向平行,通过捕捉所述灰度图中高亮部分,并置于等比例的凹凸情况,得出基桩三维成像图。
18.进一步的,对于任意一个所述imf分量函数cj(τ)到yj(t)的定义为:
[0019][0020]
式中:τ为希尔伯特变换的积分变量,利用cj(τ)与yj(t)得到的解析信号zj(t)为:
[0021][0022]
式中:aj(t)为信号瞬时幅值,θj(t)为信号相位;
[0023]
或者zj(t)表示为:
[0024][0025]
式中:a为信号瞬时幅值,λ为信号衰减因子,f为信号振荡频率,为信号初始相位;
[0026]
每一个所述imf分量完成希尔伯特变换后,得到幅值谱函数x(t)表达式为:
[0027][0028]
式中:ai(t)和ωi(t)分别为第i个imf分量的瞬时幅值和角速度。
[0029]
本发明的有益效果:
[0030]
本发明所提供的多通道环形阵列成像方法,在基桩靠近顶部的桩身侧面表面利用耦合剂粘结若干个呈环形布置的加速度传感器,环形大小可根据桩的周长变化,从而构建了一发多收的高精度损伤检测平台,通过多通道环形阵列叠加的方式增强反射信号幅值,使得典型缺陷的反射波更加明显;对波形进行hht分析,可将波形信号分频率提取,有助于消除非稳态信号的影响,经处理后的信号定位更加准确,精度高于传统商用低应变检测;利用hht分析信号得到时间—频率—能量的三维hilbert谱图,构建环形阵列成像算法,通过三维成像定量显示桩身缺陷类型、位置,成像直观,易于判断,避免了人为主观因素干扰。
附图说明
[0031]
图1为根据本发明实施例的加速度传感器布置示意图;
[0032]
图2为根据本发明实施例反射信号时域图;
[0033]
图3为根据本发明实施例检测结果三维成像图。
[0034]
图4为根据本发明实施例的多通道环形阵列偏转灰度图。
具体实施方式
[0035]
下面详细描述本发明的实施例,所述实施例的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施例是示例性的,旨在用于解释本发明,而不能理解为对本发明的限制。
[0036]
在本发明的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“长度”、“宽度”、“厚度”、“上”、“下”、“轴向”、“径向”、“竖直”、“水平”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制
[0037]
在本发明中,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”、“固定”等术语应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本发明中的具体含义。
[0038]
下面首先结合附图具体描述根据本发明实施例的一种用于基桩完整性检测多通道环形阵列成像方法,包括如下步骤:
[0039]
s01:若干加速度传感器沿周向均布成环形粘贴于基桩侧面,将所述加速度传感器通过导线与基于fpga的多通道阵列接收装置连接,组成多通道环形阵列成像检测平台,所述环形的大小根据基桩的周长变化,桩身直径越大,传感器数量越多,所述加速度传感器用于采集桩基结构中的损伤信号;
[0040]
本实施例中加速度传感器的个数为八个,通过耦合剂黄油粘贴在基桩侧面。
[0041]
s02:将基桩顶部的中心位置作为激振点,通过尼龙锤激多次敲击激振点,激振点收到激振力后产生应力波,应力波在桩身内主要以纵波方式传播,应力波通过缺陷处由于阻抗变化会产生反射波,各反射波先后到达各加速度传感器处并产生振动动效应,从而获得多通道反射时域信号,多次锤击,采集重复性高的时域信号,如图2(a)所示fpga装置对各通道输送的时域信号按照通道平行排列,得到时域曲线;
[0042]
s03:利用多通道信号耦合算法,将所述多通道环形阵列成像检测平台获得的时域信息进行同相位叠合得到时域增强信号,实现一维损伤定位检测;
[0043]
如图2(b)对叠加后的时域曲线进行分析,通过已知波速与桩长判断首波与桩底反射波。若首波与桩底反射波之间无明显的反射峰存在则判断桩身为完整,低应变检测结束;若首波与桩底反射波之间存在明显的反射波则判断存在缺陷,将一维初步检测结果作为三维阵列成像检测参考,为此进入到下一步;
[0044]
s04:通过基于fpga的多通道阵列接收装置内部的hht分模态处理算法对步骤s02得到的重复性高的时域信号进行hht,得到一个时间—频率—能量的三维hilbert谱图,应用环形阵列成像算法,得出基桩三维成像图,通过所述三维成像图定量显示桩身缺陷类型、位置。
[0045]
其中,hht的具体步骤为:通过emd方法将步骤s02得到的重复性高的时域信号分解为若干个imf分量,如图3所示导出有效的imf分量,对各通道的imf分量函数进行hilbert变换处理可以得到一个时间—频率—能量的三维hilbert谱图。
[0046]
对于任意一个所述imf分量函数cj(τ)到yj(t)的定义为:
[0047][0048]
式中:τ为希尔伯特变换的积分变量,利用cj(τ)与yj(t)得到的解析信号zj(t)为:
[0049][0050]
式中:aj(t)为信号瞬时幅值,θj(t)为信号相位;
[0051]
或者zj(t)表示为:
[0052][0053]
式中:a为信号瞬时幅值,λ为信号衰减因子,f为信号振荡频率,为信号初始相位;
[0054]
每一个所述imf分量完成希尔伯特变换后,得到幅值谱函数x(t),表达式为:
[0055][0056]
式中:ai(t)和ωi(t)分别为第i个imf分量的瞬时幅值和角速度。
[0057]
应用环形阵列成像算法,得出基桩三维成像图具体为:
[0058]
步骤a1:将hilbert谱图频率轴转化为以一个所述加速度传感器所在位置作为基点,各其他所述加速度传感器围绕该压电片进行偏转,时间轴转化为波传播的距离,能量大小通过灰度值展示,得到距离-环形周长-振幅多通道环形阵列偏转灰度图,如图4所示;
[0059]
步骤a2:通过分析步骤s03中一维损伤定位检测结果,识别桩底,根据已有波速计算桩长,并建立与桩身长度相同的圆柱体模型;
[0060]
步骤a3:将所述灰度图耦合于所述圆柱体模型之上,所述灰度图中x轴方向与所述圆柱体模型长度方向平行,通过捕捉所述灰度图中高亮部分,并置于等比例的凹凸情况,得出基桩三维成像图。
[0061]
在本说明书的描述中,参考术语“一个实施例”、“一些实施例”、“示例”、“具体示例”、或“一些示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本发明的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不一定指的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任何的一个或多个实施例或示例中以合适的方式结合。
[0062]
尽管上面已经示出和描述了本发明的实施例,可以理解的是,上述实施例是示例性的,不能理解为对本发明的限制,本领域的普通技术人员在不脱离本发明的原理和宗旨的情况下在本发明的范围内可以对上述实施例进行变化、修改、替换和变型。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1