张力传感器的制作方法
1.本发明涉及传感器技术领域,特别涉及张力传感器。
背景技术:
2.在纺织用纱线的生产中,涉及对纱线的张力进行检测,常见的悬臂式的张力传感器,其内部的悬臂可能受环境因素或者外界冲击力而产生变形,例如长期放置,受到温度和湿度的影响,悬臂会产生不可逆形变,又或者因运输磕碰、调试时使用不当而受到外界较大的冲击力时,内部的悬臂也容易发生不可逆的形变,这种形变会使得传感器在使用时其零点位置发生偏移,而影响其检测精度。
技术实现要素:
3.本发明的主要目的是提出一种张力传感器,旨在为内部悬臂提供补偿弹力,从而缓解甚至避免环境高温或者外部冲击使得悬臂出现的不可逆形变。
4.为实现上述目的,本发明提出一种张力传感器,包括:
5.支架,所述支架的一端具有突出设置的悬挂部;
6.悬臂弹片,所述悬臂弹片具有相向设置的固定端和自由端,所述固定端与所述悬挂部固定连接,所述自由端用于通过导线件传递纱线压力的变化;以及,
7.弹性补偿部,设于所述支架与所述悬臂弹片之间,所述弹性补偿部水平方向上相向的两侧分别与所述支架和所述悬臂弹片抵接,以对所述悬臂弹片施加补偿弹力。
8.可选地,所述弹性补偿部包括弹片,所述弹片弯曲设置,具有第一弯曲部和第二弯曲部,所述第一弯曲部和所述第二弯曲部的连接处形成有与所述悬臂弹片接触的弯曲面,所述第一弯曲部和所述第二弯曲部远离所述弯曲面的端部固定至所述支架。
9.可选地,所述弹片的材质为铍铜;和/或,
10.所述第一弯曲部和所述第二弯曲部的厚度设置为由所述支架朝向所述悬臂弹片的方向呈渐缩。
11.可选地,所述弹片的厚度为d1,其中,0.05≤d1≤0.1mm;和/或,
12.所述弹片的宽度为l1,其中,1≤l1≤2mm。
13.可选地,所述弹性补偿部包括弹簧,所述弹簧的一端固定至所述支架,另一端与所述悬臂弹片抵接。
14.可选地,所述弹性补偿部设置在所述支架靠近所述悬挂部的位置;和/或,
15.所述悬臂弹片的材质为铍铜。
16.可选地,所述支架开设有避让孔,所述避让孔与所述悬臂弹片的自由端对应设置;
17.所述张力传感器还包括:
18.电路板组件,设于所述支架背向所述悬臂弹片的一侧,所述电路板组件包括电路板和设于所述电路板的霍尔感应芯片,所述霍尔感应芯片显露于所述避让孔设置;以及,
19.磁铁,设于所述导线件朝向所述避让孔的侧部,所述磁铁与所述霍尔感应芯片对
应,以与所述霍尔感应芯片之间形成零点间隙。
20.可选地,所述导线件背向所述弹性补偿部的侧部设有弧形槽,所述弧形槽用于与纱线接触;和/或,
21.所述导线件的材质为陶瓷。
22.可选地,所述悬臂弹片的厚度为d2,其中,0.2≤d2≤0.4mm;和/或,
23.所述悬臂弹片的宽度为l2,其中,2.5≤l2≤5mm。
24.可选地,所述悬臂弹片的许用应力为fa,所述弹性补偿部与所述悬臂弹片的接触处提供的补偿弹力为f0,其中,f0《《fa。
25.本发明的技术方案中,在装配完成后,所述弹性补偿部以所述支架为支撑,始终与所述悬臂弹片接触,从而可以对所述悬臂弹片提供补偿弹力,使得初始状态时,所述支架与所述悬臂弹片相向的两个侧面能够趋于平行,所述弹性补偿部所提供的补偿弹力应当远小于所述悬臂弹片变形所需的压力,但是能够始终提供一个让所述悬臂弹片具有变形趋势的力,当结构整体受到外部冲击条件下,例如较大的振动或者高温环境,会使得所述悬臂弹片发生微小的变形,此时所述弹性补偿部的设置可以通过提供补偿弹力能够抵消因温度和振动冲击等带来的微小变形,从而实现机械补偿的目的,避免零点漂移,保证产品精度。
附图说明
26.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图示出的结构获得其他的附图。
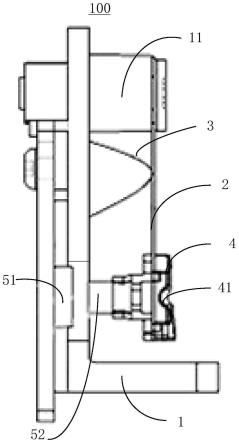
27.图1为本发明提供的张力传感器一实施例的示意图;
28.图2为图1中张力传感器的补偿弹力一状态的示意图;
29.图3为图1中张力传感器的补偿弹力另一状态的示意图;
30.图4为图1中弹性补偿部与支架位置关系示意图。
31.附图标号说明:
32.标号名称标号名称100张力传感器4导线件1支架41弧形槽11悬挂部51霍尔感应芯片2悬臂弹片52磁铁3弹性补偿部a零点间隙
33.本发明目的的实现、功能特点及优点将结合实施例,参照附图做进一步说明。
具体实施方式
34.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明的一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
35.需要说明,若本发明实施例中有涉及方向性指示,则该方向性指示仅用于解释在某一特定姿态下各部件之间的相对位置关系、运动情况等,如果该特定姿态发生改变时,则该方向性指示也相应地随之改变。
36.另外,若本发明实施例中有涉及“第一”、“第二”等的描述,则该“第一”、“第二”等的描述仅用于描述目的,而不能理解为指示或暗示其相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括至少一个该特征。另外,各个实施例之间的技术方案可以相互结合,但是必须是以本领域普通技术人员能够实现为基础,当技术方案的结合出现相互矛盾或无法实现时应当认为这种技术方案的结合不存在,也不在本发明要求的保护范围之内。
37.悬臂式弹片结构的张力传感器在受温度冲击及外部振动时,会产生微小不可逆形变,从而使原始校正零点的距离发生变化,导致零点漂移。
38.鉴于此,本发明提供一种张力传感器,通过增加机械结构,实现在温度和振动冲击情况下提供变形补偿,进而保证零点漂移在可控范围内。图1至图4为本发明提供的张力传感器的实施例。
39.请参照图1至3,张力传感器100包括支架1、悬臂弹片2、弹性补偿部3,所述支架1的一端具有突出设置的悬挂部11,所述悬臂弹片2具有相向设置的固定端和自由端,所述固定端与所述悬挂部11固定连接,所述自由端用于通过导线件4传递纱线压力的变化,所述弹性补偿部3可以设于所述支架1与所述悬臂弹片2之间,所述弹性补偿部3水平方向上相向的两侧分别与所述支架1和所述悬臂弹片2抵接,以对所述悬臂弹片2施加补偿弹力。
40.本发明的技术方案中,在装配完成后,所述弹性补偿部3以所述支架1为支撑,始终与所述悬臂弹片2接触,从而可以对所述悬臂弹片2提供补偿弹力,使得初始状态时,所述支架1与所述悬臂弹片2相向的两个侧面能够趋于平行,所述弹性补偿部3所提供的补偿弹力应当远小于所述悬臂弹片2变形所需的压力,但是能够始终提供一个让所述悬臂弹片2具有变形趋势的力,当结构整体受到外部冲击条件下,例如较大的振动或者高温环境,会使得所述悬臂弹片2发生微小的变形,此时所述弹性补偿部3的设置通过提供补偿弹力能够抵消因温度和振动冲击等带来的微小变形,从而实现机械补偿的目的,避免零点漂移,保证产品精度。
41.需要说明的是,所述水平方向为弹性补偿部3整体的延伸方向,所述支架1、所述弹性补偿部3以及所述悬臂弹片2在水平方向布置。
42.在一个实施例中,所述支架1开设有避让孔,所述避让孔与所述悬臂弹片2的自由端对应设置,所述张力传感器100还包括电路板组件和磁铁52,所述电路板组件设于所述支架背向所述悬臂弹片2的一侧,所述电路板组件包括电路板和设于所述电路板的霍尔感应芯片51,所述霍尔感应芯片51显露于所述避让孔设置,所述磁铁52设于所述导线件4朝向所述避让孔的侧部,所述磁铁52与所述霍尔感应芯片51对应,以与所述霍尔感应芯片51之间形成零点间隙a。所述电路板上焊接固定有检测端口,该传感器的工作原理如下:当进行纱线的张力检测时,待测的多个纱线以高频率依次对所述悬臂弹片2的自由端的导线件4提供一个作用力,这个作用力会使得所述悬臂弹片2产生一定的振动,从而带动所述磁铁52与所述霍尔感应芯片51的相对位置变化,所述霍尔感应芯片51设置在所述电路板上,且能够显露于所述避让孔,从而能够感应到由于磁铁52晃动而带来的磁场强度变化,然后将变化的
磁场强度转化成电信号,再通过硬件和软件处理,最终输出传感器检测的纱线张力变化值,便于评价一个批次纱线的张力波动情况。
43.在此过程中,所述悬臂弹片2为正常工作状态,所述弹性补偿部3与所述悬臂弹片2接触的位置到所述悬臂弹片2的自由端的长度为有效的悬臂长度,所述弹性补偿部3不会对张力检测的过程造成影响,该张力传感器闲置或者搬运时,所述悬臂弹片2由于其薄片的结构特性,在受到外部冲击会产生朝下向所述霍尔感应芯片51、或者朝上向所述悬挂部11的变形力,该结构又能够进行机械补偿,保证所述零点间隙a的尺寸变化可控。
44.本发明不限制所述悬臂弹片2的具体形式,一实施例中,所述弹性补偿部3包括弹片,所述弹片弯曲设置,具有第一弯曲部和第二弯曲部,所述第一弯曲部和所述第二弯曲部的连接处形成有与所述悬臂弹片2接触的弯曲面,所述第一弯曲部和所述第二弯曲部远离所述弯曲面的端部固定至所述支架1。即所述弹片整体呈v形或者u形设置,其弯曲面与所述悬臂弹片2接触,所述弹片的形状特性使其在具有良好的弹性的同时能够具有稳定的支撑效果,在与所述支架1连接后形成三角支撑结构,不容易受外力影响而发生形变,弹片的弹性变形量可以为所述悬臂弹片2提供补偿弹力。
45.基于上述实施例,考虑到所述弹片本身也可能受到外部冲击的影响,因此,可以通过形状的设计而使得弹片的外形更加的稳定,具体的,所述第一弯曲部和所述第二弯曲部连接的部位可以设置为直线结构,所述第一弯曲部和所述第二弯曲部的端部也可以设置成波浪段,均能提供支撑效果。当然可以理解的是,弹片也可以弯折为其它可能的规则或者不规则形状,具体的可以根据实际情况选择,本说明书实施例对此不作限定。
46.在其他实施例中,可以设置所述第一弯曲部和所述第二弯曲部的厚度设置为由所述支架1朝向所述悬臂弹片2的方向呈渐缩。此时,所述第一弯曲部与所述第二弯曲部和所述支架1连接的端部的结构强度较大,提供稳定的支撑力,接近所述弯曲面的部位的厚度逐渐减小,从而使得其与所述悬臂弹片2接触部位感知作用力变化更加敏感,当然可以理解的是,弹片的厚度也可以是均匀设置的,具体的可以根据是需求设置,本说明书实施例对此不作限定。
47.进一步的,本说明书实施例不限制所述弹片的材质,优选所述弹片的材质为铍铜,铍铜具有良好的耐蚀性、导热性,受冲击时不产生火花,从而保证补偿弹力的稳定性,延长所述弹片的使用寿命,需要说明的是,也可以选择其他铜合金或者不锈钢等材料,在此不作限制。
48.更进一步的,所述弹片的材质、尺寸均会对其能够提供的补偿弹力的力值造成影响,一实施例中,所述弹片的厚度可以为d1,其中,0.05≤d1≤0.1mm,另一实施例中,所述弹片的宽度可以为l1,其中,1≤l1≤2mm。本实施例中,同时对d1和l1的范围做出限定,以将补偿弹力限制在一定的范围内。
49.在其他实施例中,所述弹性补偿部3还可以是弹簧,所述弹簧的一端固定至所述支架1,另一端与所述悬臂弹片2抵接,同样能够提供弹性补偿力,需要说明的是,所述弹簧可以根据设计需求为竖直放置或者倾斜放置。
50.可以理解的是,也可以选用弹性系数满足条件的橡胶件作为弹性补偿部3,需要说明的是,所述弹性补偿部3通过机械接触提供补偿弹力,所以优选的不采用不具备弹性的刚性件。
51.在一些实施例中,为了保证所述悬臂弹片2与纱线接触后起到振动作用的部分的有效长度,所述弹性补偿部3可以设置在所述支架1靠近所述悬挂部11的位置,即所述弹性补偿部3与所述悬挂部11之间的间距可以小于所述弹性补偿部3与所述霍尔感应芯片51之间的间距,如此使得在起到机械补偿的同时又不会影响悬臂检测的功能。
52.可以理解的是,所述弹性补偿部3安装以后,所述悬臂弹片2理想状态下无明显的位置偏移,其保持受重力自然下垂的状态。
53.本发明不限制所述悬臂弹片2的材质,优选为铍铜,也可以选择其他铜合金或者不锈钢等材质,此外,还可以经过特殊的成型和后处理工艺,提升所述悬臂弹片2的力学性能。
54.需要说明的是,上述两个相关联的技术特征,所述弹性补偿部3的位置和所述悬臂弹片2的材质,可以同时限定也可以择一限定,具体的可以根据实际情况确定,本说明书实施例对此不作限定。
55.所述悬臂弹片2能够承受的最大压力受到其尺寸和外形的影响,本实施例中,保持其外形不变,整体呈长条的薄片,可以将其厚度和/或宽度限定在一定的范围内,具体的,所述悬臂弹片2的厚度为d2,其中,0.2≤d2≤0.4mm,所述悬臂弹片2的宽度为l2,其中,2.5≤l2≤5mm。
56.考虑到所述磁铁52的安装和纱线的接触压力,本实施例中,所述磁铁52用于与所述导线件4连接为一体。即先将所述磁铁52与所述导线件4组装,然后将整体组装在所述悬臂弹片21的自由端,使得所述导线件4的一侧面供磁铁52安装,另一侧面能够传递纱线压力,同时所述导线件4为所述悬臂弹片2提供向下的作用力,保证所述悬臂弹片2整体呈现受重力自然下垂的状态,纱线在检测时与所述导线件4接触,不会对所述主体造成影响,提高耐久性。
57.进一步的,所述导线件4的材质可以为陶瓷,陶瓷材质具有良好的耐磨性能。
58.为了提高检测精度,所述导线件4背向所述弹性补偿部3的侧部可以设有弧形槽41,所述弧形槽41与所述磁铁52对应设置,用于与纱线接触,弧形的结构设计能够使得纱线顺利的滑落,同时保证了定点接触,便于检测结果的稳定性。
59.需要说明的是,上述两个相关联的技术特征,所述导线件4的材质和所述弧形槽41的设计,可以同时设置也可以择一设置。
60.在一些实施例中,需要合理的考虑所述悬挂部11与所述弹性补偿部3与所述悬臂弹片2接触点之间的的支撑距离,可以使其符合以下设计要求:所述悬臂弹片2的许用应力为fa,所述弹性补偿部3与所述悬臂弹片2的接触处提供的补偿弹力为f0,其中,f0《《fa。即f0要远小于其设计选用的所述悬臂弹片2在支撑距离下的许用应力值,以保证所述弹性补偿部3不会出现永久变形,同时,要根据传感器最大允许的零点漂移换算的所述零点间隙a的范围值,从而设计计算出f0最小的值,从而达到补偿的效果。
61.进一步的,请参照图4,所述弹性补偿部3与所述悬臂弹片2的接触点至所述悬挂部11之间的距离为l,l即为所述悬臂弹片2的支撑距离,l的尺寸由所述弹性补偿部3在所述支架1上的位置决定,因此需要通过合理的设置所述弹性补偿部2在所述支架1上的位置达到设计要求,鉴于设计需要保证f0《《fa,因此设计所述弹性补偿部3处在所述支架1靠近所述悬挂部11的位置,且保证所述弹性补偿部3与所述悬挂部11之间预留有足够的变形间隙。
62.在一个实施例中,本发明不限制所述支架1的结构形式,可以为一体结构,也可以
为分离式的组装结构。本实施例中,所述支架1可以呈l形设置,所述支架1竖向的部分的上端设置所述悬挂部11,其水平的部分形成的平台与所述悬臂弹片21的自由端间隔,所述支架1竖向的部分与所述悬臂弹片21在自然状态下趋于平行。
63.无补偿结构时,所述悬臂弹片2受外部因素的影响时,可能导致零点间隙a变大或变小,从而导致零点偏移,造成测量精度的偏差,设置补偿结构后,传感器补偿方式如下:
64.初始时,所述悬臂弹片2受到所述弹性补偿部3提供的补偿弹力f0;
65.请参照图2,当所述悬臂弹片2受外力产生向下、朝向所述霍尔感应芯片51弯曲变形时,所述弹性补偿部3受所述悬臂弹片2的压力f1,通过自身弹性提供的与压力f1反向的f0,从而补偿平衡f1,从而保证零点间隙a的尺寸不会变小,实现零点漂移变化可控;
66.请参照图3,而当悬臂弹片2受外力产生向上弯曲、朝向所述悬挂部11变形时,由于所述弹性补偿部3在装配后,所述弹性补偿部3和所述悬臂弹片2接触的部位存在摩擦力,因此已经对所述悬臂弹片2施加了向上的补偿弹力f0,使得所述悬臂弹片2不会产生向上的形变,同样可保证零点间隙a的尺寸不会变大,实现零点漂移变化可控。
67.可以理解的是,通过机械补偿的形式使得悬臂弹片2始终受到一个使其产生应力变形的补偿弹力,当所述悬臂弹片2本身的受外力影响发生外形应力变形时,由于初始的补偿弹力大于外界因素造成的应力变形量,因此,外部因素的影响就不会对所述悬臂弹片2造成实际变形。
68.本发明的技术方案中,由于所述弹性补偿部3的设计,可以保证悬臂弹片2在受外部冲击条件下,能够最大限度的补偿冲击后所述悬臂弹片2的微小变形,从而保证零点漂移的可控,保证产品精度,同时,由于零点补偿的效果,可以将所述零点间隙a的尺寸控制在有效精度范围内,提高产品的耐环境性,扩大产品的使用范围,同时可延长产品寿命。
69.以上所述仅为本发明的优选实施例,并非因此限制本发明的专利范围,凡是在本发明的发明构思下,利用本发明说明书及附图内容所作的等效结构变换,或直接/间接运用在其他相关的技术领域均包括在本发明的专利保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1