一种湿地生态安全检测预警一体化设备及其控制方法
1.本发明属于生态安全检测技术领域,特别涉及一种湿地生态安全检测预警一体化设备及其控制方法。
背景技术:
2.湿地生态安全对于湿地内的可持续发展起着重要的作用,而影响湿地生态安全的因素有很多。尤其是在汛期或干旱期时,湿地水域覆盖面积极易发生变化,而这种变化会直接影响到湿地内的生态安全与平衡。因此需要对湿地内的水域覆盖面积进行实时监测。
3.经检索,现有技术中,中国专利公开号:cn216480029u,授权公开日:2022-05-10,公布了一种湿地水域环境监控装置。包括箱体1,箱体1一侧设置有控制器2,箱体1下端设置有漂浮板101,箱体1上端设置有支撑板103,支撑板103一侧设置有发光条1031,发光条1031使得夜晚也能监控到,支撑板103上端对称设置有两个太阳能板3,箱体1内部设置有蓄电池4,蓄电池4右端设置有电动伸缩杆5。上述实施例能够对水域的水质进行检测。
4.但上述实施例依然具有以下缺陷:无法对湿地全境的水域覆盖面积进行实时监测,特别是在汛期或干旱期,需要人工现场勘查,从而提高了劳动强度,并且由于人工差异,造成水域覆盖面积监测工作的准确度降低。
技术实现要素:
5.针对上述问题,本发明提供了一种湿地生态安全检测预警一体化设备,包括图像处理总台,所述图像处理总台包括控制模块、图像处理模块和警报信息输出模块;
6.所述图像处理总台壳体侧壁上呈环形阵列分布有若干组步进电机,所述步进电机输出端上传动连接有图像收集单元,所述图像收集单元与控制模块信号连接;
7.所述图像处理总台四周呈环形阵列分布有与图像收集单元数量相同的若干组无人机站点,每组所述无人机站点内均设有一组自主式无人机;所述自主式无人机包括无人机本体;且所述无人机本体上安装有图像采集装置,所述图像采集装置输出端与相应一组图像收集单元信号连接。
8.进一步的,所述图像处理总台底部安装有总台支撑杆;所述总台支撑杆的侧壁上呈环形阵列分布有与图像收集单元数量相同的若干组升降滑轨。
9.进一步的,所述图像处理总台壳体顶部设有出风单元,且底部设有进风单元,所述出风单元与进风单元的腔体均与图像处理总台的腔体连通。
10.进一步的,所述进风单元包括第一安装座;所述第一安装座安装在所述图像处理总台壳体底部,且所述第一安装座底部安装有进风头,所述进风头底部直径要小于顶部直径;所述进风头侧壁上呈环形阵列分布有若干组第一弧形槽,所述第一弧形槽两侧内壁的延伸路径均为扇环形结构;所述第一弧形槽内开设有冷风进风口,所述冷风进风口另一侧与图像处理总台的腔体连通。
11.进一步的,所述出风单元包括第二安装座;所述第二安装座顶部安装有出风塔,所
述出风塔为喇叭状结构,且所述出风塔底部直径要小于顶部直径;所述出风塔顶部安装有顶板;所述出风塔侧壁上呈环形阵列分布有若干组第二弧形槽,所述第二弧形槽两侧内壁的延伸路径均为扇环形结构;且所述第二弧形槽顶部延伸至顶板的底部外壁上;所述第二弧形槽内开设有热风出风口,所述热风出风口另一侧与图像处理总台的腔体连通。
12.进一步的,所述图像收集单元包括雷达延长杆;所述雷达延长杆底部铰接有滑杆,所述滑杆另一端安装在相应的一组第一滑块上。
13.进一步的,所述雷达延长杆一端与所述步进电机的输出端传动连接,且另一端安装有第一图像接收雷达;所述第一图像接收雷达四周呈环形阵列分布有若干组突杆,所述突杆一端安装在雷达延长杆上,且另一端安装有第二图像接收雷达;所述第二图像接收雷达朝向与第一图像接收雷达朝向之间的夹角大于
°
且小于
°
;所述第一图像接收雷达与第二图像接收雷达均与控制模块信号连接。
14.进一步的,所述无人机本体的壳体上安装有生物热能探测器;且所述无人机本体底部安装有自防御机构。
15.进一步的,所述自防御机构包括电机箱;所述电机箱安装在无人机本体底部中心处,所述电机箱内安装有伺服电机;所述电机箱正下方设有圆盘;所述电机箱底部外壁上开设有环形滑槽,所述环形滑槽内滑动连接有若干组第二滑块,所述第二滑块另一端安装在圆盘上;所述圆盘底部中心处安装有储液箱,所述储液箱侧壁上呈环形阵列分布有若干组高压喷头;所述伺服电机和高压喷头均与生物热能探测器电性连接。
16.一种湿地生态安全检测预警一体化设备控制方法,所述控制方法包括:
17.将图像处理总台置于湿地中心,将若干组无人机站点呈环形阵列分布在湿地四周边缘处;
18.将无人机本体与相应一组图像收集单元建立信号连接,再将图像收集单元与图像处理总台建立信号连接,并通过图像处理总台的控制模块设定各组无人机本体的拍摄路径;
19.同时启动各组无人机本体按照各自相应设定路线飞行,并在飞行途中对所属区域的湿地进行图像采集工作,得到初始图像,然后上传至图像处理模块,生成湿地水域的初始覆盖面积;
20.通过控制模块在初始覆盖面积之上和之下分别设置最高阈值和最低阈值;
21.通过图像处理总台的控制模块设定无人机本体每次固定飞行拍摄时间;
22.到达拍摄时间后,无人机本体起飞并沿设定路线对所属区域内的湿地进行图像采集,得到实时图像,并将采集的实时图像上传至相应的一组图像收集单元上,再由图像收集单元将实时图像上传至控制模块内;
23.通过控制模块将实时图像上传至图像处理模块,并与初始图像进行比对,比较两组图像中湿地水域的覆盖面积是否有变化,当超过所设定的最高阈值,或是低于所设定的最低阈值时,通过警报信息输出模块向湿地负责人员发送通知,以示警告。
24.本发明的有益效果是:
25.1、将各组无人机本体呈环形阵列分布在图像处理总台四周,并对各组无人机本体划定拍摄区域和路径,然后定期对各自对应的区域进行全方位图像采集,然后发送至图像处理总台与初始图像信息进行分析比对。看湿地水域覆盖面积是否上升或下降,当上升或
下降至所设定的阈值后,通过警报信息输出模块向工作人员发送警报。从而满足了检测警报一体化的需求。并且无需人工现场勘察,降低了劳动强度,也提高了整体自动化程度。与此同时,利用最直观的图像比对方式判定湿地水域覆盖面积的变化,提高了检测精度。
26.2、无人机本体在飞行过程中,实时对周围环境进行探测,当有鸟类或昆虫抵近无人机本体时,就会被生物热能探测器探测到,然后给伺服电机和高压喷头发送工作指令,利用伺服电机带动圆盘、储液箱以及各组高压喷头旋转。然后利用高压喷头将储液箱内的鸟类驱除药剂呈放射状喷洒至四周。在无人机本体四周形成屏障,在不对鸟类或昆虫伤害的前提下将其驱离。既保护了湿地动物,也保证了无人机本体不受伤害。
27.3、由于第二图像接收雷达朝向与第一图像接收雷达朝向之间的夹角大于0
°
且小于90
°
,因此第一图像接收雷达和各组第二图像接收雷达组合构成放射状结构,从而扩大了雷达接收面。当一图像接收雷达和各组第二图像接收雷达均无法接收到图像信息时,通过步进电机带动雷达延长杆旋转,直至接收到图像信息为止。无论自主式无人机的飞行角度和飞行高度如何,都可通过其接收到图像信息,扩大了雷达接收面,增加了信号传输强度,提高了检测工作的流畅性。
28.4、通过将各组无人机本体呈环形阵列分布在湿地四周,可实现对湿地的全覆盖检测,并定期通过无人机采集图像信息上传至图像处理总台,与初始图像信息进行比对,随时得到湿地水域覆盖面积变化数据,并在超出或低于最高或最低阈值时发出警报,在无需人工现场勘查的情况下即可快速检测水域覆盖面积的变化情况。既降低了劳动强度,同时也提高了检测效率。
29.本发明的其它特征和优点将在随后的说明书中阐述,并且,部分地从说明书中变得显而易见,或者通过实施本发明而了解。本发明的目的和其他优点可通过在说明书、权利要求书以及附图中所指出的结构来实现和获得。
附图说明
30.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作一简单地介绍,显而易见地,下面描述中的附图是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
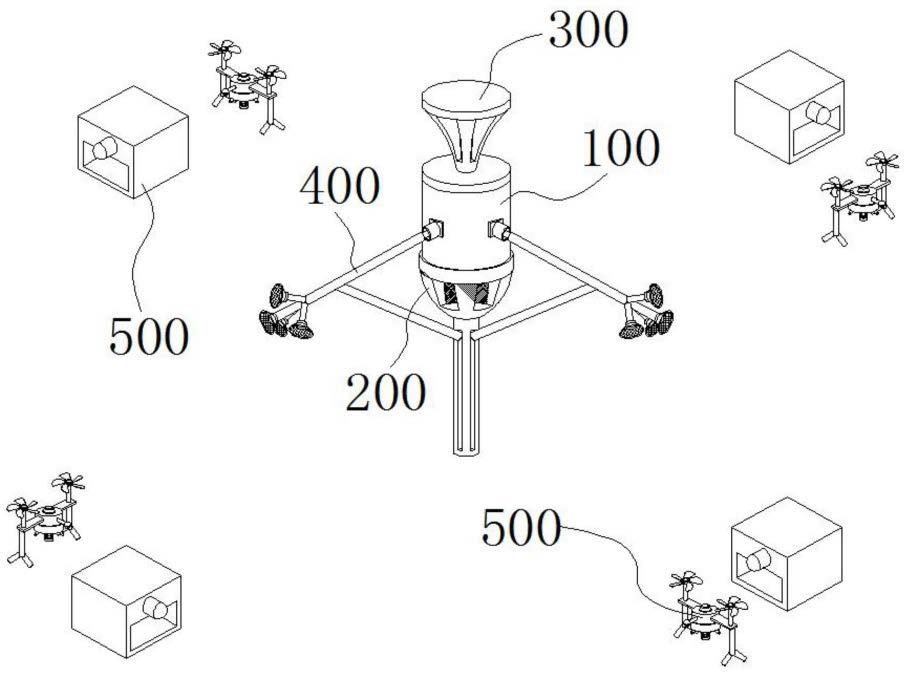
31.图1示出了根据本发明实施例的一体化设备的结构示意图;
32.图2示出了根据本发明实施例的图像处理总台与总台控制杆的连接示意图;
33.图3示出了根据本发明实施例的图像处理总台的结构示意图;
34.图4示出了根据本发明实施例的进风单元的仰视示意图;
35.图5示出了根据本发明实施例的出风单元的仰视示意图;
36.图6示出了根据本发明实施例的图像收集单元的结构示意图;
37.图7示出了根据本发明实施例的自主式无人机的结构示意图;
38.图8示出了根据本发明实施例的自防御机构的仰视示意图;
39.图9示出了根据本发明实施例的一体化设备检测工作的流程框图。
40.图中:100、图像处理总台;101、总台支撑杆;102、升降滑轨;110、步进电机;200、进风单元;210、第一安装座;220、进风头;230、第一弧形槽;240、冷风进风口;300、出风单元;
310、第二安装座;320、出风塔;330、顶板;340、第二弧形槽;350、热风出风口;400、图像收集单元;410、雷达延长杆;420、滑杆;430、第一图像接收雷达;440、突杆;450、第二图像接收雷达;500、无人机站点;600、自主式无人机;610、无人机本体;620、生物热能探测器;630、图像采集装置;640、自防御机构;641、电机箱;642、环形滑槽;643、第二滑块;644、圆盘;645、储液箱;646、高压喷头。
具体实施方式
41.为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地说明,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
42.本发明实施例提供了一种湿地生态安全检测预警一体化设备,包括图像处理总台100。示例性的,如图1、图2和图3所示,所述图像处理总台100包括但不限于控制模块、图像处理模块和警报信息输出模块。控制模块用于控制设备上各部件的工作状态,图像处理模块用于对采集到的图像信息进行分析比对。警报信息输出模块用于在生态安全超过设定阈值后,向终端发送警报信号。
43.所述图像处理总台100的壳体底部中心处安装有进风单元200,且所述图像处理总台100的壳体顶部中心处安装有出风单元300。所述进风单元200和出风单元300的腔体均与图像处理总台100壳体的内腔连通。进风单元200和出风单元300用于对图像处理总台100的腔体形成循环气流,在保证防尘防雨水的前提下,实现对图像处理总台100的腔体进行散热。
44.所述进风单元200下方设有总台支撑杆101,所述总台支撑杆101顶部贯穿于进风单元200的壳体,且固定安装在图像处理总台100的壳体底部。所述总台支撑杆101的侧壁上呈环形阵列分布有若干组升降滑轨102。所述升降滑轨102上滑动连接有第一滑块。
45.所述图像处理总台100侧壁上呈环形阵列分布有与升降滑轨102数量相同的若干组步进电机110,所述步进电机110与控制模块电性连接。每组所述步进电机110的输出端上均传动连接有一组图像收集单元400,所述图像收集单元400与图像处理模块信号连接。图像收集单元400用于接收图像信息。
46.所述图像处理总台100四周呈环形阵列分布有与图像收集单元400数量相同的若干组无人机站点500,每组所述无人机站点500内均设有一组自主式无人机600,每组所述自主式无人机600均与相应的一组图像收集单元400信号连接。
47.将图像处理总台100设置在湿地中心处,然后将若干组无人机站点500呈环形阵列分布在图像处理总台100四周,并且通过控制模块对每组自主式无人机600均划定拍摄区域及拍摄路径,使得各组自主式无人机600可以将湿地完全覆盖。然后设定拍摄时间,到时间后,每组自主式无人机600沿规划好的路径进行飞行,并在飞行过程中,对湿地进行图像采集,并将采集后的图像实时发送至相应的一组图像收集单元400上,再由图像收集单元400发送给图像处理模块。
48.所述进风单元200包括第一安装座210。示例性的,如图4所示,所述第一安装座210安装在所述图像处理总台100壳体底部,且所述第一安装座210底部安装有进风头220,所述
进风头220底部直径要小于顶部直径。所述进风头220侧壁上呈环形阵列分布有若干组第一弧形槽230,所述第一弧形槽230两侧内壁的延伸路径均为扇环形结构。所述第一弧形槽230内开设有冷风进风口240,所述冷风进风口240另一侧与图像处理总台100的腔体连通。
49.所述出风单元300包括第二安装座310。示例性的,如图5所示,所述第二安装座310顶部安装有出风塔320,所述出风塔320为喇叭状结构,且所述出风塔320底部直径要小于顶部直径。所述出风塔320顶部安装有顶板330。所述出风塔320侧壁上呈环形阵列分布有若干组第二弧形槽340,所述第二弧形槽340两侧内壁的延伸路径均为扇环形结构。且所述第二弧形槽340顶部延伸至顶板330的底部外壁上。所述第二弧形槽340内开设有热风出风口350,所述热风出风口350另一侧与图像处理总台100的腔体连通。
50.外部冷空气通过各组冷风进风口240进入进风头220中,再由进风头220进入图像处理总台100内,实现了对图像处理总台100腔体内各部件的散热工作。然后冷空气遇热温度升高得到热空气,并向上进入出风塔320内,再由热风出风口350排出。由于第一弧形槽230和第二弧形槽340两侧内壁的延伸路径均为扇环形,因此无论冷空气热空气从哪个角度吹过,最终都会汇集到冷风进风口240或热风出风口350处,从而提高了散热效率。又因为出风塔320和进风头220的顶部直径均大于底部直径,因此避免了雨水进入图像处理总台100的腔体内。
51.所述图像收集单元400包括雷达延长杆410。示例性的,如图6所示,所述雷达延长杆410一端与所述步进电机110的输出端传动连接,且另一端安装有第一图像接收雷达430。所述第一图像接收雷达430四周呈环形阵列分布有若干组突杆440,所述突杆440一端安装在雷达延长杆410上,且另一端安装有第二图像接收雷达450。所述第二图像接收雷达450朝向与第一图像接收雷达430朝向之间的夹角大于0
°
且小于90
°
。所述第一图像接收雷达430与第二图像接收雷达450均与控制模块信号连接。所述雷达延长杆410底部铰接有滑杆420,所述滑杆420另一端安装在相应的一组第一滑块上。
52.由于第二图像接收雷达450朝向与第一图像接收雷达430朝向之间的夹角大于0
°
且小于90
°
,因此第一图像接收雷达430和各组第二图像接收雷达450组合构成放射状结构,从而扩大了雷达接收面。当第一图像接收雷达430和各组第二图像接收雷达450均无法接收到图像信息时,通过步进电机110带动雷达延长杆410旋转,直至接收到图像信息为止。无论自主式无人机600的飞行角度和飞行高度如何,都可通过其接收到图像信息,扩大了雷达接收面,增加了信号传输强度,提高了检测工作的流畅性。
53.所述自主式无人机600包括无人机本体610。示例性的,如图7和图8所示,所述无人机本体610的壳体上安装有生物热能探测器620,且所述无人机本体610上安装有图像采集装置630,所述图像采集装置630的输出端与相应一组图像收集单元400信号连接。所述无人机本体610底部安装有自防御机构640。
54.示例性的,所述自防御机构640包括电机箱641。所述电机箱641安装在无人机本体610底部中心处,所述电机箱641内安装有伺服电机。所述电机箱641正下方设有圆盘644。所述电机箱641底部外壁上开设有环形滑槽642,所述环形滑槽642内滑动连接有若干组第二滑块643,所述第二滑块643另一端安装在圆盘644上。所述圆盘644底部中心处安装有储液箱645,所述储液箱645侧壁上呈环形阵列分布有若干组高压喷头646。所述伺服电机和高压喷头646的控制机构均与生物热能探测器620电性连接。
55.将图像处理总台100设置在湿地中心处,然后将若干组无人机站点500呈环形阵列分布在图像处理总台100四周,并且通过控制模块对每组自主式无人机600均划定拍摄区域及拍摄路径,使得各组自主式无人机600可以将湿地完全覆盖。然后设定拍摄时间,当到达设定时间后,每组无人机本体610同时沿规划好的路径进行飞行,并在飞行过程中,对湿地进行图像采集,并将采集后的图像实时发送至相应的一组图像收集单元400上,再由图像收集单元400发送给图像处理模块进行分析比对。无需人工现场勘察,即可以图像的形式得到湿地水域覆盖信息。然后将所得图像信息与初始信息进行比对,当水域覆盖面积下降或上升到控制模块所设定的阈值后,通过警报信息输出模块向工作人员发送警报。从而满足了检测警报一体化的需求。
56.无人机本体610在飞行过程中,实时对周围环境进行探测,当有鸟类或昆虫抵近无人机本体610时,就会被生物热能探测器620探测到,然后给伺服电机和高压喷头646发送工作指令,利用伺服电机带动圆盘644、储液箱645以及各组高压喷头646旋转。然后利用高压喷头646将储液箱645内的鸟类驱除药剂呈放射状喷洒至四周。在无人机本体610四周形成屏障,在不对鸟类或昆虫伤害的前提下将其驱离。既保护了湿地动物,也保证了无人机本体610不受伤害。
57.本实施例具有以下有益效果:
58.1、将各组无人机本体610呈环形阵列分布在图像处理总台100四周,并对各组无人机本体610划定拍摄区域和路径,然后定期对各自对应的区域进行全方位图像采集,然后发送至图像处理总台100与初始图像信息进行分析比对。看湿地水域覆盖面积是否上升或下降,当上升或下降至所设定的阈值后,通过警报信息输出模块向工作人员发送警报。从而满足了检测警报一体化的需求。并且无需人工现场勘察,降低了劳动强度,也提高了整体自动化程度。与此同时,利用最直观的图像比对方式判定湿地水域覆盖面积的变化,提高了检测精度。
59.2、无人机本体610在飞行过程中,实时对周围环境进行探测,当有鸟类或昆虫抵近无人机本体610时,就会被生物热能探测器620探测到,然后给伺服电机和高压喷头646发送工作指令,利用伺服电机带动圆盘644、储液箱645以及各组高压喷头646旋转。然后利用高压喷头646将储液箱645内的鸟类驱除药剂呈放射状喷洒至四周。在无人机本体610四周形成屏障,在不对鸟类或昆虫伤害的前提下将其驱离。既保护了湿地动物,也保证了无人机本体610不受伤害。
60.3、由于第二图像接收雷达450朝向与第一图像接收雷达430朝向之间的夹角大于0
°
且小于90
°
,因此第一图像接收雷达430和各组第二图像接收雷达450组合构成放射状结构,从而扩大了雷达接收面。当第一图像接收雷达430和各组第二图像接收雷达450均无法接收到图像信息时,通过步进电机110带动雷达延长杆410旋转,直至接收到图像信息为止。无论自主式无人机600的飞行角度和飞行高度如何,都可通过其接收到图像信息,扩大了雷达接收面,增加了信号传输强度,提高了检测工作的流畅性。
61.4、将进风单元200和出风单元300分别设定在图像处理总台100的上下两端,使得冷空气可以与图像处理总台100内的每个角落充分接触,从而提高了散热效果。由于第一弧形槽230和第二弧形槽340两侧内壁的延伸路径均为扇环形,因此无论冷空气热空气从哪个角度吹过,最终都会汇集到冷风进风口240或热风出风口350处,从而提高了散热效率。又因
为出风塔320和进风头220的顶部直径均大于底部直径,因此避免了雨水进入图像处理总台100的腔体内。
62.在上述一种湿地生态安全检测预警一体化设备的基础上,本发明实施例还提出了一种用于该一体化设备的控制方法。示例性的,如图9所示,所述控制方法包括:
63.将图像处理总台置于湿地中心,将若干组无人机站点呈环形阵列分布在湿地四周边缘处;
64.将无人机本体与相应一组图像收集单元建立信号连接,再将图像收集单元与图像处理总台建立信号连接,并通过图像处理总台的控制模块设定各组无人机本体的拍摄路径;
65.同时启动各组无人机本体按照各自相应设定路线飞行,并在飞行途中对所属区域的湿地进行图像采集工作,得到初始图像,然后上传至图像处理模块,生成湿地水域的初始覆盖面积;
66.通过控制模块在初始覆盖面积之上和之下分别设置最高阈值和最低阈值;
67.通过图像处理总台的控制模块设定无人机本体每次固定飞行拍摄时间;
68.到达拍摄时间后,无人机本体起飞并沿设定路线对所属区域内的湿地进行图像采集,得到实时图像,并将采集的实时图像上传至相应的一组图像收集单元上,再由图像收集单元将实时图像上传至控制模块内;
69.通过控制模块将实时图像上传至图像处理模块,并与初始图像进行比对,比较两组图像中湿地水域的覆盖面积是否有变化,当超过所设定的最高阈值,或是低于所设定的最低阈值时,通过警报信息输出模块向湿地负责人员发送通知,以示警告。
70.通过将各组无人机本体呈环形阵列分布在湿地四周,可实现对湿地的全覆盖检测,并定期通过无人机采集图像信息上传至图像处理总台,与初始图像信息进行比对,随时得到湿地水域覆盖面积变化数据,并在超出或低于最高或最低阈值时发出警报,在无需人工现场勘查的情况下即可快速检测水域覆盖面积的变化情况。既降低了劳动强度,同时也提高了检测效率。
71.尽管参照前述实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的精神和范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1