一种基于RISC-V架构的干涉型光纤陀螺信号调制解调系统的制作方法
一种基于risc-v架构的干涉型光纤陀螺信号调制解调系统
技术领域
1.本发明涉及干涉型光纤陀螺信号处理技术领域,特别是涉及一种基于risc-v架构的干涉型光纤陀螺信号调制解调系统。
背景技术:
2.干涉型光纤陀螺已经广泛的应用于空天飞行器以及军事领域,如航空航天、导弹惯导系统、无人机导航等领域。有关它的高精度控制是一个多闭环,涉及光电信号转换处理与高速响应的闭环数字处理系统,传统控制方法中需要对干涉型光纤陀螺光纤环传回光电检测器的电压信号经过滤波、放大以及a/d转换(模数转换)进而传入逻辑控制单元,控制干涉型光纤陀螺光路中的多功能光电器件y波导产生调制相位差,使陀螺工作在线性区域。
3.现有的针对干涉型光纤陀螺的信号处理系统主要包括:第一,光电检测器,滤波放大电路以及a/d(模数转换)、d/a转换(数模转换)电路;第二,逻辑控制单元,用来产生数字闭环调制信号以及解调干涉型光纤陀螺角速率信号并采样输出。
技术实现要素:
4.为了解决现有技术中陀螺标度因数稳定性差的技术问题,本发明的一个目的在于提供一种基于risc-v架构的干涉型光纤陀螺信号调制解调系统,所述调制解调系统包括:电路系统,所述电路系统包括fpga处理器,以及
5.与所述fpga处理器、第二数模转换器和反馈增益放大器形成的第一反馈回路;
6.与所述fpga处理器、第一数模转换器、第二数模转换器和反馈增益放大器形成的第二反馈回路;
7.其中,所述第一反馈回路引入一非互易相位误差,用于补偿干涉型光纤陀螺的光纤环旋转引起的相移;
8.所述第二反馈回路对2π复位误差信号进行积分累加后,由所述第一数模转换器加至所述第二数模转换器的参考电压上。
9.在一个优选的实施例中,所述调制解调系统还包括:光路系统,
10.所述光路系统包括依次连接的光源、耦合器、相位调制器和光纤环;所述电路系统还包括光电探测器、前置放大器和模数转换器;
11.所述光电探测器连接所述耦合器,所述前置放大器连接所述光电探测器,所述模数转换器连接所述前置放大器,进行信号采样。
12.在一个优选的实施例中,通过比较所述光电探测器复位前后的输出值,获取2π复位误差信号。
13.在一个优选的实施例中,所述模数转换器的位数n至少大于12。
14.在一个优选的实施例中,所述电路系统还包括滤波器,所述滤波器连接至所述光电探测器与所述前置放大器之间。
15.在一个优选的实施例中,fpga处理器搭建risc-v架构,包括risc-v处理核,以及控
制单元,
16.其中,所述控制单元包括第一反馈回路控制单元,用于产生非互易相位误差,补偿干涉型光纤陀螺的光纤环旋转引起的相移;
17.第二反馈回路控制单元,用于对2π复位误差信号进行积分累加计算。
18.在一个优选的实施例中,所述控制单元至少还包括光源驱动控制单元和时序控制单元。
19.本发明提供的一种基于risc-v架构的干涉型光纤陀螺信号调制解调系统,通过设计第一反馈回路和第二反馈回路,采用risc-v微处理器控制四态方波调制的双闭环控制,保证了陀螺能在任意角速率输入下每2π周期对陀螺前向通道增益进行一次温度补偿,提高了陀螺标度因数的稳定性。
20.本发明提供的一种基于risc-v架构的干涉型光纤陀螺信号调制解调系统,第一反馈回路通过risc-v处理核驱动第一反馈回路控制单元,产生一个反馈相移的数字量((非互易相位误差))抵消sagnac效应(萨格纳克效应)产生的相位差,使陀螺闭环系统工作在零位工作点附近,保证了最大工作线性度。
21.发明提供的一种基于risc-v架构的干涉型光纤陀螺信号调制解调系统,通过精简指令集risc-v架构所搭建,采用fpga实现一个单核32位的小型risc-v处理器核,采用verilog语言编写;利用此处理器配置实现不同需求的干涉型光纤陀螺的工作状态,结合不同环境所要求的干涉型光纤陀螺光路类型,用户可配置调用指令处理干涉型光纤陀螺的调制信号,解调输出的干涉型光纤陀螺角速率信号,提高干涉型光纤陀螺的开发效率,缩短开发周期。降低干涉型光纤陀螺信号处理部分的研发成本,为干涉型光纤陀螺推广民用市场提供技术支持。
附图说明
22.为了更清楚地说明本发明具体实施方式或现有技术中的技术方案,下面将对具体实施方式或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图是本发明的一些实施方式,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
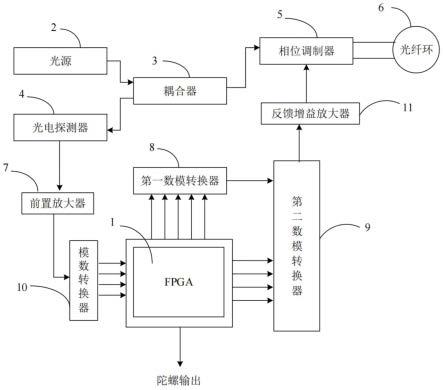
23.图1示意性示出了一种基于risc-v架构的干涉型光纤陀螺信号调制解调系统的整体结构示意图。
24.图2示出了本发明fpga处理器上搭建risc-v架构的示意图。
具体实施方式
25.为了使本发明的上述以及其他特征和优点更加清楚,下面结合附图进一步描述本发明。应当理解,本文给出的具体实施例是出于向本领域技术人员解释的目的,仅是示例性的,而非限制性的。
26.为了解决现有技术中陀螺标度因数稳定性差的技术问题,如图1所示一种基于risc-v架构的干涉型光纤陀螺信号调制解调系统的整体结构示意图,根据本发明的实施例,提供一种基于risc-v架构的干涉型光纤陀螺信号调制解调系统,调制解调系统包括:电路系统和光路系统。
27.光路系统包括依次连接的光源2、耦合器3、相位调制器5和光纤环6。电路系统包括光电探测器4、前置放大器7、模数转换器10、fpga处理器1、第一数模转换器8、第二数模转换器9和反馈增益放大器11。
28.根据本发明的实施例,fpga处理器1、第二数模转换器9和反馈增益放大器11形成的第一反馈回路。在第一反馈回路引入一非互易相位误差,用于补偿干涉型光纤陀螺的光纤环6旋转引起的相移。
29.根据本发明的实施例,fpga处理器1、第一数模转换器8、第二数模转换器9和反馈增益放大器11形成的第二反馈回路。第二反馈回路对2π复位误差信号进行积分累加后,由第一数模转换器8加至第二数模转换器9的参考电压上。
30.根据本发明的实施例,光电探测器4连接耦合器3,采集耦合器输出的光信号,并将光信号转换成电信号。前置放大器7连接光电探测器4,将电信号放大处理。模数转换器10连接前置放大器7,将电信号转换成数字信号,进行信号采样,并将采集的信号传输至fpga处理器1进行处理。
31.在一些优选的实施例中,电路系统还包括滤波器,滤波器连接至光电探测器4与前置放大器7之间。
32.如图2所示本发明fpga处理器上搭建risc-v架构的示意图,根据本发明的实施例,fpga处理器搭建risc-v架构。fpga处理器1通过精简指令集架构risc-v设计risc-v处理器核101,以及控制单元102。fpga处理器1执行干涉型光纤陀螺数字信号处理。risc-v架构的搭建基于rtl(register transfer level,寄存器转换级电路)实现,直接由fpga可编程逻辑芯片实现其功能。控制单元102基于hdl(hardware description language)语言编写,实现对信号的处理。
33.根据本发明的实施例,risc-v处理器核101至少包括通用寄存器组、指令接口、操作数接口、数据返回接口、操作请求接口、运算完成/等待接口。
34.控制单元102包括第一反馈回路控制单元、第二反馈回路控制单元、光驱动控制单元和时序控制单元。
35.在一些优选的实施例中,控制单元102至少还包括信号滤波单元、信号放大单元、异步串行通信单元、模数/数模转换单元。
36.根据本发明的实施例,fpga处理器1,通过控制单元102的第一反馈回路控制单元,产生非互易相位误差,补偿干涉型光纤陀螺的光纤环6旋转引起的相移。通过控制单元102的第二反馈回路控制单元,用于对2π复位误差信号进行积分累加计算,其中,通过比较光电探测器4复位前后的输出值,获取2π复位误差信号。
37.模数转换器10位数选择。
38.根据本发明的实施例,模数转换器10的位数n至少大于12。在具体的实施例中,从光电探测器4出来的表征旋转角速率的方波信号的最小有用信号幅值小于0.1uv,噪声为mv级,为使信号能够被模数转换器(a/d电路)10采集到以便于在fpga处理器1中完成解调,需要将该信号放大。
39.从光电探测器4输出的信号可表示为:i(t)=i0±
i0sin(δφs(t)-δφf(t))。
40.式中直流分量并不不包含有用的陀螺信息,而且极易造成后续陀螺放大电路达到饱和。滤波器、前置放大器7对直流分量进行滤波以及放大干涉型光纤陀螺输出信号,供模
数转换器(a/d电路)10采集到以便于在fpga处理器1中完成解调。
41.a/d的工作过程一般分为采样,保持,量化及编码。性能指标包括分辨率、转换精度和速度。对于n位的a/d,假如输入电压范围是v
min
≤v
out
≤v
max
,该a/d分辨的最小电压为(v
max-v
min
)/(2
n-1)。转换时间是a/d从启动到输出稳定的数字量的时间间隔。
42.由于表征干涉型光纤陀螺旋转信息的方波信号十分微弱,在微弱信号处理中,对于a/d的最小分辨率要求只需要满足小于前放噪声1σ值的最低有效为即可。已知前置放大器的标准噪声偏差774nv/hz,通过信号的带宽为1mhz。所以前置放大器7引入的噪声为0.774mv,对于输入电压范围为2.5v的a/d来说,需要的位数n至少为:
[0043][0044]
由上式计算可得n的最小整数为12,即模数转换器10的位数n至少大于12。
[0045]
在一些实施例中,通信采用异步串行通信模式,异步串行通信的数据格式由起始位、数据位、停止位组成,特殊的还有奇偶校验位。
[0046]
第一反馈回路控制过程。
[0047]
根据本发明的实施例,当旋转角速率较大时出光强与相位差会有明显的非线性关系,这对陀螺的标度因数非常不利,会大大降低陀螺的动态范围,而且考虑到电路中电子元件的温漂影响,为提高设计陀螺的整体性能,陀螺控制方式采用闭环设计,这样既可以使得偏差始终在零附近又可以提高系统的精度和抗干扰能力。
[0048]
根据本发明的实施例,第一反馈回路控制单元产生一个非互易相位误差引入到光纤环6(陀螺的敏感线圈),用于补偿光纤环10旋转引起的sagnac相移,即:使光纤环6相向传播的两列光波之间的相位差始终为零,为引入非互易相位误差后,光纤环6相向传播的两列光波之间的相位差;为为引入非互易相位误差前,光纤环6相向传播的两列光波之间的相位差。通过测量这个非互易相位误差就可以得到陀螺的输出。
[0049]
引入非互易相位误差前,加入方波偏置信号的两列传播的光波所产生的干涉信号光强如下:
[0050][0051][0052]
两列波的光强差为:
[0053]
由上式两列波的光强差可知,引入非互易相位误差前,加入方波偏置信号后输出的陀螺光强变化与sagnac相位差成正弦变化:
[0054]
当较小时,光强和相位差成线性变化。但当转速比较快时,值较大,二者不在呈现为线性变化关系,这将大大减少了陀螺测量的动态范围。为
使其呈现为线性变化关系,光纤陀螺采用闭环反馈控制方案,在第一反馈回路中,fpga处理器1通过risc-v处理器核101驱动一反馈回路控制单元产生一个非互易相位误差抵消sagnac效应产生的相位差使陀螺闭环系统工作在零位工作点附近,保证了最大工作线性度。
[0055]
第二反馈回路控制过程。
[0056]
考虑到反馈增益放大器11(运放)易产生电子漂移、相位调制器5(y波导)半波电压不稳定、电子器件参数稳定性易受温度影响等,会使通道增益改变,进而减小2π复位的实时性。因此为保证2π复位精度,有必要引入第二闭环以实现精确的2π复位。
[0057]
经过推算证明,通过比较光电探测器4复位前后的输出值,就能够测得2π复位误差信号。
[0058]
在第二反馈回路中,fpga处理器1通过risc-v处理器核101驱动二反馈回路控制单元对2π复位误差信号进行积分累加输入到第一数模转换器8,将第一数模转换器8的值加到第一反馈回路的第二数模转换器9的参考电压上。
[0059]
经过反馈增益放大器11(运放)放大后通过相位调制器5(y波导),可以实现第二反馈回路的数字闭环反馈,从而实现合适的2π复位。
[0060]
本发明一种基于risc-v架构的干涉型光纤陀螺信号调制解调系统,通过设计第一反馈回路和第二反馈回路,采用risc-v微处理器控制四态方波调制的双闭环控制,保证了陀螺能在任意角速率输入下每2π周期对陀螺前向通道增益进行一次温度补偿,提高了陀螺标度因数的稳定性。
[0061]
本发明的一些实施例中,开发用户配置系统,用户配置系统由c语言编写,实现本发明一种基于risc-v架构的干涉型光纤陀螺信号调制解调系统调用及工作状态的配置。
[0062]
用户配置系统,配置芯片调用不同干涉型光纤陀螺的信号控制模块,适用于不同的干涉型光纤陀螺光路场景。集成封装干涉型光纤陀螺risc-v数字处理芯片和外围模块及接口电路,可与不同应用场景的干涉型光纤陀螺光路部分实现连接。
[0063]
用户配置系统,在不同的工作状态,可根据不同干涉型光纤陀螺的光路系统配置干涉型光纤陀螺数字信号处理芯片工作在开环/闭环/多闭环、光源驱动控制与否等工作状态下。设定好不同运行模式的调用程序可实现数字开环干涉型光纤陀螺、单闭环数字干涉型光纤陀螺、双闭环数字四态波调制干涉型光纤陀螺、双闭环数字四态波调制及光源驱动控制干涉型光纤陀螺的信号控制系统的配置以及参数调节。
[0064]
本发明一种基于risc-v架构的干涉型光纤陀螺信号调制解调系统,基于精简指令集,代替传统干涉型光纤陀螺信号处理系统的逻辑控制单元来产生干涉型光纤陀螺数字闭环调制信号以及解调角速率输出信号。通过预先暂存的指令配置,适用于不同场景的干涉型光纤陀螺输出不同的调制波形,矩形波、四态波、正弦波(适用于开环干涉型光纤陀螺),解调对应调制信号所输出的角速率信号。
[0065]
本发明一种基于risc-v架构的干涉型光纤陀螺信号调制解调系统,按照最复杂的双闭环数字四态波调制及光源驱动控制干涉型光纤陀螺的信号控制系统配置所需信号接口,双闭环数字四态波调制及光源驱动配置接口,也确保了运行在其他模式时候硬件资源的充足。
[0066]
尽管上面已经示出和描述了本发明的实施例,可以理解的是,上述实施例是示例性的,不能理解为对本发明的限制,本领域的普通技术人员在本发明的范围内可以对上述实施例进行变化、修改、替换和变型。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1