基于子集带符号残差检验的非视距鉴定方法、装置和介质与流程
本发明属于无线电定位,具体涉及基于子集带符号残差检验的非视距鉴定方法、装置和介质。
背景技术:
1、非视距(non-line-of-sight,称nlos)现象常见于无线电定位环境中,信号传播由于障碍物的遮挡,使得实际的传播时延大于真实距离所需时延,从而引发较大的定位误差,对蜂窝系统而言,这种现象尤其高发于城市小区中,nlos问题已成为限制定位精度进一步提升的瓶颈。
2、chan和tsui等基于所设计的视距(line-of-sight,称los)环境近似最大似然估计法(即aml法),提出了利用aml中间估计位置残差概率分布特性进行非视距(non-line-of-sight,称nlos)基站数据鉴定的方法(即chan法)。当所有基站测量值都为los时,文中所定义的归一化残差为中心的χ2分布,而如果含有nlos测量值,则该归一化残差服从非中心的χ2分布。通过设定适当的χ2分布检验阈值,挑选符合要求的候选假设(基站下标集合的某子集,对应为某个假定的los基站组合)。当候选假设不止一个时,以检验量超出阈值范围最少数量对应的假设确立最佳los基站组合。当基站数目处于系统最小要求值时,文中还提出了δ检验法,用以提高算法的适应性。
3、与chan法处理过程类似,刘霞提出了一种改进的nlos鉴定方法(即liu法),仍然基于aml中间估计下归一化残差的χ2分布检验,利用重新定义的距离残差,liu法不需要对每种假设的子假设作检验,且不用反复计算近似克拉美劳下界(crlb)等参数,因而大幅降低chan法的复杂度。并且,距离残差仅依赖中间估计,其精度相较位置残差更优。liu法在处理最小数目基站情形时,仍沿用了chan法中的δ检验法。
4、chan法复杂度较高,应用范围都非常有限,liu法的复杂度有所降低,但因仍基于χ2分布,受限于归一化独立高斯变量的形式,计算上有较多的冗余;另外,不论chan法和liu法,其最小数目基站下的检验均为δ检验,而δ检验使得算法性能在最小数目基站情形下降幅很大,因而为改善此时的性能,更加简单高效地统一鉴定方法也需要进一步探索。
技术实现思路
1、本发明的目的在于提升了非视距鉴定方法的鉴定性能和适用范围,统一候选假设择优和最小数目基站下的鉴定方法,改善最小基站数目下检验法的鉴定效果,提高非视距鉴定的精度。
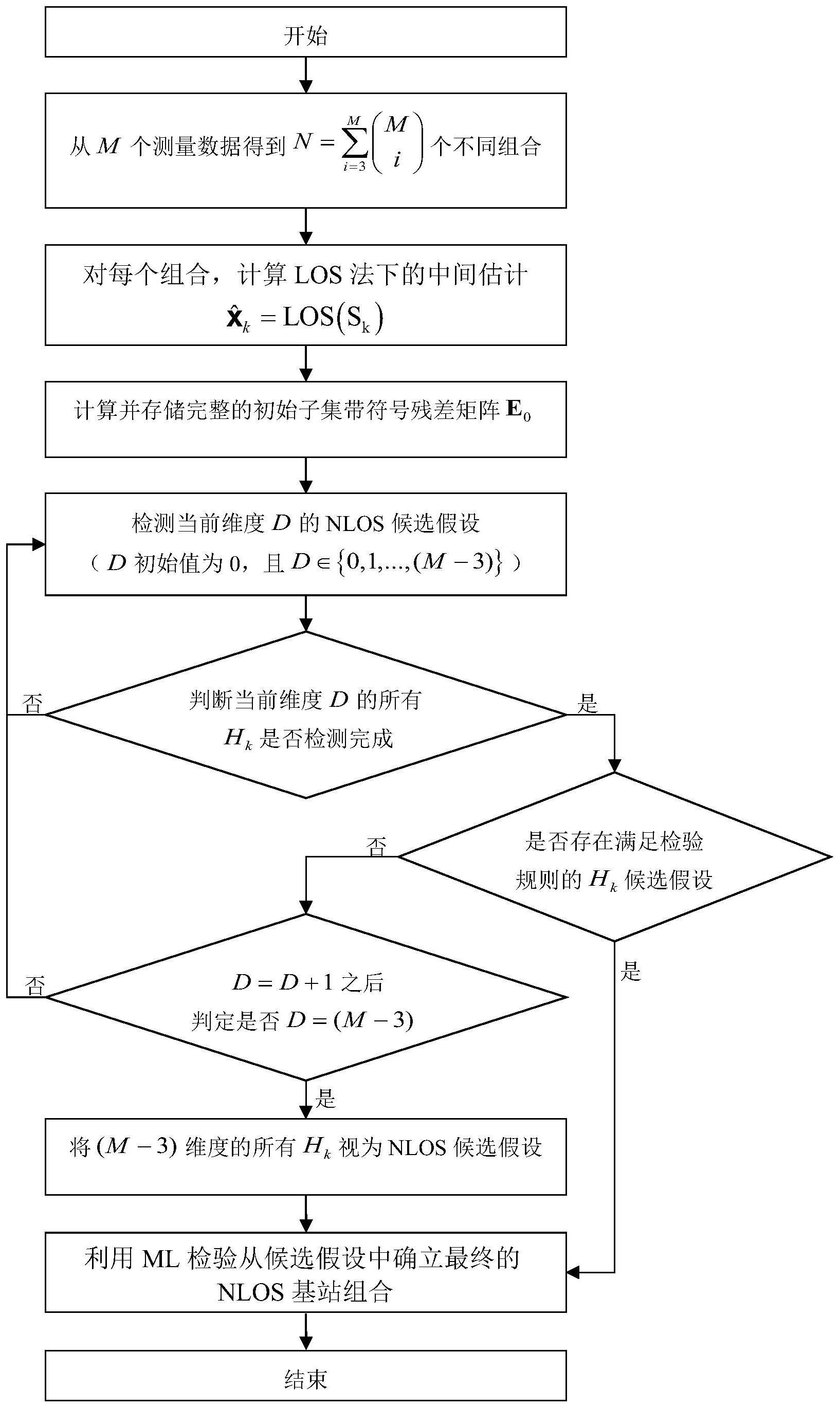
2、为实现上述目的,本发明提供了基于子集带符号残差检验的非视距鉴定方法,包括:
3、步骤s100,对定位测量数据进行分组的步骤;
4、该步骤中,从m个定位测量数据中任取其中大于等于dmin个的定位测量数据作为一个定位测量数据组;所述m个定位测量数据是参与移动站定位且位置已知的基站接收来自移动站的同一信号而获得的数据,dmin表示计算移动站位置所需定位测量数据的最少个数,
5、其中,m≥dmin,第m个基站的位置坐标记为xm=(xm,ym)t,1≤m≤m,第m个基站获得的定位测量数据记为定位测量数据中含有均值为零的高斯随机噪声,记随机噪声向量n=[n1 n2…nm]t,nm为第m个定位测量数据中的随机噪声,随机噪声向量的协方差矩阵为q;定位测量数据组中定位测量数据下标的集合记为集合sk,共有n个满足该条件的下标集合sk,即1≤k≤n,按高维到低维的顺序排列,依次为包含所有定位测量数据下标的集合s1={1,2,...,m},包含m-1个所有定位测量数据下标的集合s2={1,2,...,m-1},s3={1,2,...,m-2,m},…,依次类推,最后是包含dmin个定位测量数据下标的集合为sn={1,2,...,dmin};
6、步骤s200,按照分组用每个分组对应的定位测量数据进行中间估计的步骤;
7、该步骤中,对每个集合sk所对应的定位测量数据组,分别进行单次视距估计,得到n个中间估计值其中,1≤k≤n,los(*)表示依据定位测量数据组*进行单次视距估计;
8、步骤s300,利用得到的中间估计值计算完整的初始子集带符号残差矩阵e0的步骤;
9、该步骤中,根据每个集合sk的中间估计值求其m维子集带符号残差向量该向量由m个元素构成,即:
10、
11、其中,第m个元素定义为:
12、
13、其中,1≤m≤m,m∈sk表示集合sk中元素m对应的定位测量数据的带符号残差;
14、用上述n个按行组合构成一个n×m维的矩阵,即初始子集带符号残差矩阵e0为:
15、
16、步骤s400,基于初始子集带符号残差矩阵e0检测非视距候选假设的步骤;
17、该步骤中,按照从低维到高维的顺序检测当前维度d上是否存在满足非视距检验规则的集合hk;其中,集合hk为集合sk在全集{1,2,...,m}中的补集,即h2={m},h3={m-1},…,hn={m,m-1,...,dmin+1};包括步骤:
18、步骤hd,对于当前维度d,0≤d<m-dmin,基于初始子集带符号残差矩阵e0检测个d维集合hk是否为满足非视距检验规则的集合,若d维集合hk是满足非视距检验规则的集合,则将d维集合hk标记为非视距候选假设,并且在检测完当前维度所有集合之后转入步骤s500,若不存在满足非视距检验规则的集合,则升高一个维度重复上述检测,若直到d=m-dmin-1时仍不存在满足非视距检验规则的集合,则进入步骤
19、所述非视距检验规则为:根据给定的置信水平α以及由置信水平α确定的阈值λm,或者根据给定的阈值λm以及由阈值λm确定的置信水平α,0<α<1,λm>0,记落在阈值区间ρm=[-λm,λm]之外的带符号残差剩余矩阵ek元素个数为lk,若满足lk≤floor((1-α)·(m-d)·nk),则判定集合hk满足非视距假设,即在置信水平α下集合hk对应的所有定位测量数据为非视距;所述floor(*)表示对*的向下取整,所述nk为带符号残差剩余矩阵ek的行数,所述带符号残差剩余矩阵ek按如下步骤得到:
20、步骤e1,从初始子集带符号残差矩阵e0中标识出第m个定位测量数据参与中间估计的所有行号,构成集合wm,1≤m≤m;
21、步骤e2,根据集合hk中的d个元素h1,h2,…,hd,逐一查找对应的集合而后求其并集
22、步骤e3,从初始子集带符号残差矩阵e0中删除所有并集vk中的行,即删除行号a∈vk的行,剩余行列构成一个子集带符号残差剩余矩阵ek;
23、所述阈值λm近似满足下式,
24、
25、
26、其中,fm(nm)为第m个定位测量数据中单一维度高斯噪声的概率密度函数,qmm为随机噪声向量n=[n1 n2 … nm]t的协方差矩阵q中的第m个主对角线元素;
27、步骤当前维度d=m-dmin,将个m-dmin维集合hk全部标记为非视距候选假设,转入步骤s500;
28、步骤s500,从非视距候选假设中确定最终非视距基站组合的步骤;
29、该步骤中,若步骤s400检测出仅有一个非视距候选假设,则输出该非视距候选假设下标对应的基站为最终的非视距基站组合;若存在多个非视距候选假设,则针对所有非视距候选假设的集合hk,根据其对应的子集带符号残差剩余矩阵ek,计算其对应的似然度量lk,
30、
31、其中,nu为子集带符号残差剩余矩阵ek第u行的非零元素所构成的列向量,代表子集带符号残差剩余矩阵ek第u行所对应的基站组合在去除非视距基站影响后的带符号残差值向量,也即近似的剩余噪声向量;qu为去除非视距数据所对应的行与列后,依nu中数据顺序整理而成的新的协方差矩阵;au为nu的向量维度,也即的qu行数或列数,选取似然度量lk最大的非视距候选假设,将对应的集合hk中对应的基站作为最终的非视距基站组合,检验结束。
32、进一步的,所述定位测量数据是toa数据或者tdoa数据,并且dmin=3。
33、进一步的,当随机噪声向量为零均值独立的高斯白噪声时,随机噪声向量的协方差矩阵q退化为对角矩阵,所有非对角元素均取值为零,即步骤s300中还对子集带符号残差向量进行归一化,归一化后的子集带符号残差向量为步骤s400采用归一化后子集带符号残差向量进行计算,通过查表得到不同置信水平α下的阈值λm取值,或者根据不同的阈值区间ρm=[-λm,λm]的阈值λm直接查出对应的置信水平α。
34、进一步的,步骤s500中,求似然度量lk最大值采用求子集带符号残差剩余矩阵ek的各元素平方残差和jk最小值替代,即:
35、
36、选取平方残差和jk最小的非视距候选假设,将对应的集合hk中对应的基站作为最终的非视距基站组合。
37、本发明还提供了一种基于子集带符号残差检验的非视距鉴定装置,包括定位测量数据分组模块、中间估计模块、初始子集带符号残差矩阵计算模块、非视距候选假设检测模块和最终非视距基站组合确定模块;其中,
38、定位测量数据分组模块,用于从m个定位测量数据中任取其中大于等于dmin个的定位测量数据作为一个定位测量数据组;所述m个定位测量数据是参与移动站定位且位置已知的基站接收来自移动站的同一信号而获得的数据,dmin表示计算移动站位置所需定位测量数据的最少个数,
39、其中,m≥dmin,第m个基站的位置坐标记为xm=(xm,ym)t,1≤m≤m,第m个基站获得的定位测量数据记为定位测量数据中含有均值为零的高斯随机噪声,记随机噪声向量n=[n1 n2…nm]t,nm为第m个定位测量数据中的随机噪声,随机噪声向量的协方差矩阵为q;定位测量数据组中定位测量数据下标的集合记为集合sk,共有n个满足该条件的下标集合sk,即1≤k≤n,按高维到低维的顺序排列,依次为包含所有定位测量数据下标的集合s1={1,2,...,m},包含m-1个所有定位测量数据下标的集合s2={1,2,...,m-1},s3={1,2,...,m-2,m},…,依次类推,最后是包含dmin个定位测量数据下标的集合为sn={1,2,...,dmin};
40、中间估计模块用于对每个集合sk所对应的定位测量数据组,分别进行单次视距估计,得到n个中间估计值其中,1≤k≤n,los(*)表示依据定位测量数据组*进行单次视距估计;
41、初始子集带符号残差矩阵计算模块用于,根据每个集合sk的中间估计值求其m维子集带符号残差向量该向量由m个元素构成,即:
42、
43、其中,第m个元素定义为:
44、
45、其中,1≤m≤m,m∈sk表示集合sk中元素m对应的定位测量数据的带符号残差;
46、用上述n个按行组合构成一个n×m维的矩阵,即初始子集带符号残差矩阵e0为:
47、
48、非视距候选假设检测模块用于按照从低维到高维的顺序检测当前维度d上是否存在满足非视距检验规则的集合hk;其中,集合hk为集合sk在全集{1,2,...,m}中的补集,即h2={m},h3={m-1},…,hn={m,m-1,...,dmin+1};包括子模块hd和子模块
49、子模块hd用于,对于当前维度d,0≤d<m-dmin,基于初始子集带符号残差矩阵e0检测个d维集合hk是否为满足非视距检验规则的集合,若d维集合hk是满足非视距检验规则的集合,则将d维集合hk标记为非视距候选假设,并且在检测完当前维度所有集合之后调用最终非视距基站组合确定模块,若不存在满足非视距检验规则的集合,则升高一个维度重复上述检测,若直到d=m-dmin-1时仍不存在满足非视距检验规则的集合,则调用子模块
50、所述非视距检验规则为:根据给定的置信水平α以及由置信水平α确定的阈值λm,或者根据给定的阈值λm以及由阈值λm确定的置信水平α,0<α<1,λm>0,记落在阈值区间ρm=[-λm,λm]之外的带符号残差剩余矩阵ek元素个数为lk,若满足lk≤floor((1-α)·(m-d)·nk),则判定集合hk满足非视距假设,即在置信水平α下集合hk对应的所有定位测量数据为非视距;所述floor(*)表示对*的向下取整,所述nk为带符号残差剩余矩阵ek的行数,所述带符号残差剩余矩阵ek采用如下子模块得到:
51、子模块e1,从初始子集带符号残差矩阵e0中标识出第m个定位测量数据参与中间估计的所有行号,构成集合wm,1≤m≤m;
52、子模块e2,根据集合hk中的d个元素h1,h2,…,hd,逐一查找对应的集合而后求其并集
53、子模块e3,从初始子集带符号残差矩阵e0中删除所有并集vk中的行,即删除行号a∈vk的行,剩余行列构成一个子集带符号残差剩余矩阵ek;
54、所述阈值λm近似满足下式,
55、
56、
57、其中,fm(nm)为第m个定位测量数据中单一维度高斯噪声的概率密度函数,qmm为随机噪声向量n=[n1 n2…nm]t的协方差矩阵q中的第m个主对角线元素;
58、子模块当前维度d=m-dmin,将个m-dmin维集合hk全部标记为非视距候选假设,调用最终非视距基站组合确定模块;
59、最终非视距基站组合确定模块,用于从非视距候选假设中确定最终非视距基站组合,若非视距候选假设检测模块检测出仅有一个非视距候选假设,则输出该非视距候选假设下标对应的基站为最终的非视距基站组合;若存在多个非视距候选假设,则针对所有非视距候选假设的集合hk,根据其对应的子集带符号残差剩余矩阵ek,计算其对应的似然度量lk,
60、
61、其中,nu为子集带符号残差剩余矩阵ek第u行的非零元素所构成的列向量,代表子集带符号残差剩余矩阵ek第u行所对应的基站组合在去除非视距基站影响后的带符号残差值向量,也即近似的剩余噪声向量;qu为去除非视距数据所对应的行与列后,依nu中数据顺序整理而成的新的协方差矩阵;au为nu的向量维度,也即的qu行数或列数,选取似然度量lk最大的非视距候选假设,将对应的集合hk中对应的基站作为最终的非视距基站组合,检验结束。
62、进一步的,所述定位测量数据是toa数据或者tdoa数据,并且dmin=3。
63、进一步的,当随机噪声向量为零均值独立的高斯白噪声时,随机噪声向量的协方差矩阵q退化为对角矩阵,所有非对角元素均取值为零,即初始子集带符号残差矩阵计算模块中还对子集带符号残差向量进行归一化,归一化后的子集带符号残差向量为非视距候选假设检测模块采用归一化后子集带符号残差向量进行计算,通过查表得到不同置信水平α下的阈值λm取值,或者根据不同的阈值区间ρm=[-λm,λm]直接查出对应的置信水平α。
64、进一步的,最终非视距基站组合确定模块中,求似然度量lk最大值采用求子集带符号残差剩余矩阵ek的各元素平方残差和jk最小值替代,即:
65、
66、选取平方残差和jk最小的非视距候选假设,将对应的集合hk中对应的基站作为最终的非视距基站组合。
67、本发明还提供了一种基于子集带符号残差检验的非视距鉴定装置,包括:至少一个处理器;以及,与所述至少一个处理器通信连接的存储器;其中,所述存储器存储有可被所述至少一个处理器执行的指令,所述指令被所述至少一个处理器执行,以使所述至少一个处理器能够执行所述的基于子集带符号残差检验的非视距鉴定方法。
68、本发明还提供了一种计算机可读存储介质,存储有计算机程序,所述计算机程序被处理器执行时实现所述的基于子集带符号残差检验的非视距鉴定方法。
69、有益效果
70、本发明优点在于:
71、(1)利用子集带符号残差(剩余)矩阵,能够有效降低前端估计对残差值的影响,本发明进一步提升了现有算法的鉴定准确率;
72、(2)经由提出的ml检验,既统一了多个候选假设情形下的选取流程和准则,又能依据严格计算得出的最大似然度量进行抉择,进一步提高了候选假设的选取精准度。
- 还没有人留言评论。精彩留言会获得点赞!