一种鱼眼相机辅助GNSS-INS高精度导航定位的方法
一种鱼眼相机辅助gnss-ins高精度导航定位的方法
技术领域
1.本技术属于导航定位技术领域,尤其涉及低成本设备在复杂环境下使用鱼眼相机辅助gnss-ins高精度导航定位的方法。
背景技术:
2.如今,高精度的位置服务成为我们日常生产生活中重要的一环,手机导航、自动驾驶、智能交通、机器人导航、无人车、智慧农业等方方面面都离不开高精度的位置服务,而全球定位导航系统(global navigation satellite system, gnss)作为一种广泛采用的绝对定位手段,在高精度的位置服务中起着至关重要的作用。近年来,gnss多频点、多系统的发展,为定位设备提供了充足的可见卫星数和可用信号,gnss系统的可用性、完好性和精度也得到了极大提升,同时高精度gnss定位技术实时动态定位rtk(real-time kinematic)以及精密单点定位ppp(precise point positioning)技术的成熟,使得低成本设备实现高精度定位成为了现实。然而,gnss也有脆弱性,其定位性能严重依赖于信号质量,而gnss信号质量受环境和接收机硬件影响较严重,在山区和城市等gnss 受遮挡地方,尤其是高楼密集的“城市峡谷”区域,由于环境的遮挡和反射,会导致gnss性能大大降低,对低成本接收机的影响尤为严重。因此,如何提升 gnss在复杂环境下的定位精度一直是个研究热点。
3.在“城市峡谷”等遮挡区域,玻璃和金属等建筑物表面会使卫星信号发生反射、衍射,会使接收机接收到非直射信号(non-line-of-sight,nlos),恶化定位结果。当los和nlos信号被同时被接收时,又会产生多路径效应,对定位结果造成恶劣影响。对于测量型接收机而言,可以使用复杂的硬件和算法设计来缓解多径和nlos的影响,但这也带来了昂贵的成本。相比于高精度的测量型接收机,低成本接收机受价格、体积的影响,卫星信号处理能力与天线性能相对弱很多,接收到的观测值质量也较差。已有研究表明,低成本设备接收到的 gnss信号强度要低于测量型接收机,噪声则大了很多,同时载波相位观测值的周跳也更为频繁,这给实现低成本高精度定位带来了极大的挑战。幸运的是,在手机、手表、无人机、机器人等使用低成本gnss接收机的设备上,通常存在着陀螺仪、加速度计、磁力计、气压计和摄像头等传感器,为辅助gnss定位和多源融合定位提供了良好的硬件基础。
4.为实现低成本设备在复杂环境下的高精度导航定位,本发明提出了一种鱼眼相机辅助gnss-ins高精度导航定位的方法。
技术实现要素:
5.针对上述提到的在复杂环境gnss高精度定位面临的难点,为提升低成本设备位置服务的可靠性和精度,本发明提出了一种鱼眼相机辅助gnss-ins高精度导航定位的方法。本发明的具体技术方案如下:
6.一种鱼眼相机辅助gnss-ins高精度导航定位的方法,包括以下步骤:
7.s1:通过鱼眼相机获取当前位置的天向视图,使用图像处理的方法对图片的天空区域和非天空区域进行识别分割,依据组合导航系统输出的姿态信息和标定好的鱼眼相机
成像模型获取高度角、航向角与像素点位置的对应关系。
8.由于鱼眼相机的成像有效区域为一个圆形,需要通过扫描法、霍夫变换等方法得到有效区域图像的中心坐标(xo,yo)以及半径r。对图像中的天空区域和非天空区域识别分割可以使用阈值分割、机器学习等手段,而鱼眼相机的成像模型可以通过多项式拟合进行标定:
9.r=f(θ)≈k0θ+k1θ3+k2θ5+k3θ7+k4θ9#(1)
10.其中为像素点位置(xi,yi)到图像中心(xo,yo) 的距离,θ光线为入射角,其与高度角ele的对应关系为 k0,k1……
k4为鱼眼相机标定的模型参数。
11.s2:计算卫星的高度角和方位角。通过星历获取卫星位置(xs,ys,zs),然后以惯导推算的当前位置建立站心坐标系,计算出卫星在站心坐标系中的坐标(n,e,u)。知道卫星的站心坐标即可求出它的高度角ele和方位角azi:
[0012][0013][0014]
s3:将步骤s2获取的卫星高度角和方位角信息与步骤s1得到的鱼眼图像进行匹配,通过方位角和高度角将卫星映射到图像上,依据图像的分割结果判断信号是los还是nlos。
[0015]
由s1中标定的鱼眼相机成像模型可以计算出卫星在图像上的位置(xi,yi)到图像中心的距离从而可计算出卫星在图像中的映射坐标(xi,yi):
[0016][0017]
借助图像分割的结果可以判断(xi,yi)是否处于遮挡区域。
[0018]
s4:鲁棒的nlos信号定权处理。依据得到的los信号的卫星数量判断当前环境的遮挡程度,在los信号充足时,直接排除nlos信号,在los信号不足时,对nlos信号采取降权处理。
[0019]
对nlos信号进行降权,基于载噪比的随机模型如下:
[0020][0021]
c/n0为载噪比,下标i为观测值频率;vi和ci为模型参数;需要根据不同设备类型进行参数标定;α为nols相关参数,取值如下:
[0022][0023]
与现有技术相比,本发明的优点和积极效果在于:
[0024]
本发明可以提升系统的定位精度:通过鱼眼相机的辅助,可以消除nlos信号的影响,在遮挡区域能够提升系统的绝对定位精度。
[0025]
本发明可以提升系统的鲁棒性:有ins的组合,在gnss完全失锁的环境下仍能够外推一段时间,而通过鱼眼相机的辅助,可以消除nlos,在复杂环境下不仅能提升定位精度,同时对ins的误差估计也会有积极作用,从而提升系统的鲁棒性。
[0026]
本发明具有良好的实时性:本发明可以实时获取设备各个传感器的数据,融合处理提升系统性能,可以应用在实时定位之中。
[0027]
本发明具有良好的灵活性:不仅适用于鱼眼相机获取天空图,还可以通过 3d地图、雷达等环境感知的方式获取到卫星天空图,进而实现nlos的探测识别,提升系统性能。
[0028]
本发明具有优良的可用性:本发明对在成本高性能好的设备也有一定辅助作用,而对于低成本设备的导航定位性能提升更为明显,不需要高成本的辅助手段,充分利用设备自身的各种传感器融合定位,可以极大改善低成本设备的定位精度,有着广泛的应用前景。
附图说明
[0029]
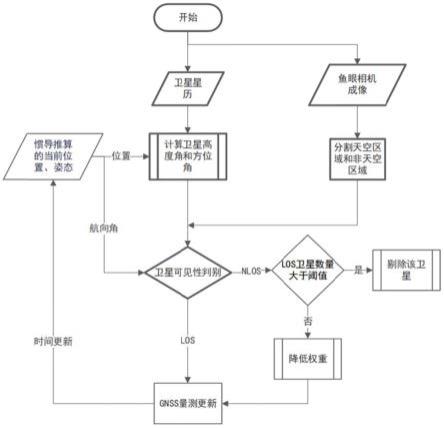
图1为本发明提出的鱼眼相机辅助gnss-ins高精度导航定位的系统流程图。
具体实施方式
[0030]
为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
[0031]
在本发明的描述中,需要理解的是,术语“长度”、“宽度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。此外,在本发明的描述中,“多个”的含义是两个或两个以上,除非另有明确具体的限定。
[0032]
如图1所示,通过鱼眼相机获取当前位置的天向视图,并对图像的天空区域和非天空区域进行分割,依据标定好的鱼眼相机的成像模型和组合导航输出的航向角可以获取卫星高度角和方位角与图像像素点位置的对应关系。以惯导推算的位置为初始位置,计算卫星高度角和方位角,并映射到鱼眼成像上。根据图像分割结果判断信号是否为nlos,在los信号充足时,直接排除nlos信号,在 los信号不足时,对nlos信号采取降权处理,在城市峡谷等遮挡环境下能够极大提升绝对定位的精度。
[0033]
具体地,一种鱼眼相机辅助gnss-ins高精度导航定位的方法,包括以下步骤:
[0034]
s1:通过鱼眼相机获取当前位置的天向视图,使用图像处理的方法对图片的天空
区域和非天空区域进行识别分割,依据组合导航系统输出的姿态信息和标定好的鱼眼相机成像模型获取高度角、航向角与像素点位置的对应关系。
[0035]
由于鱼眼相机的成像有效区域为一个圆形,需要通过扫描法、霍夫变换等方法得到有效区域图像的中心坐标(xo,yo)以及半径r。对图像中的天空区域和非天空区域识别分割可以使用阈值分割、机器学习等手段,而鱼眼相机的成像模型可以通过多项式拟合进行标定:
[0036]
r=f(θ)≈k0θ+k1θ3+k2θ5+k3θ7+k4θ9#(1)
[0037]
其中为像素点位置(xi,yi)到图像中心(xo,yo) 的距离,θ光线为入射角,其与高度角ele的对应关系为 k0,k1……
k4为鱼眼相机标定的模型参数。
[0038]
s2:计算卫星的高度角和方位角。通过星历获取卫星位置(xs,ys,zs),然后以惯导推算的当前位置建立站心坐标系,计算出卫星在站心坐标系中的坐标 (n,e,u)。知道卫星的站心坐标即可求出它的高度角ele和方位角azi:
[0039][0040][0041]
s3:将步骤s2获取的卫星高度角和方位角信息与步骤s1得到的鱼眼图像进行匹配,通过方位角和高度角将卫星映射到图像上,判断信号是los还是nlos。
[0042]
由s1中标定的鱼眼相机成像模型可以计算出卫星在图像上的位置(xi,yi)到图像中心的距离由方位角和距离可计算出卫星在图像中的映射坐标(xi,yi):
[0043][0044]
借助图像分割的结果可以判断(xi,yi)是否处于遮挡区域。
[0045]
s4:鲁棒的nlos信号定权处理。依据得到的los信号的卫星数量判断当前环境的遮挡程度,在los信号充足时,直接排除nlos信号,在los信号不足时,对 nlos信号采取降权处理。
[0046]
对nlos信号进行降权,基于载噪比的随机模型如下:
[0047][0048]
c/n0为载噪比,下标i为观测值频率;vi和ci为模型参数;需要根据不同设备类型进行参数标定;α为nols相关参数,取值如下:
[0049][0050]
为了方便理解本发明的上述技术方案,以下通过具体实施例对本发明的上述技术方案进行详细说明。
[0051]
实施例1
[0052]
在汽车上搭载低成本的gnss接收机、mems惯导和鱼眼相机,gnss的定位模式可根据成本和需求选择spp、rtk或者ppp等定位方式,获取绝对的位置信息, mems惯导和gnss组合定位,可以获取到位置、速度姿态等信息,实验开始前,通过棋盘法标定相机成像模型。在gnss的k+1历元,可以通过惯导机械编排算法依据k历元的位置、速度和姿态信息推算当前历元的粗略位置和姿态,根据这个位置信息和星历文件可以计算出当前所有接收到的卫星的高度角和方位角。与此同时,在k+1历元,可以通过搭载的鱼眼相机获取到当前时刻的天向图片,对这个图片进行提取、分割、旋转处理,即可得到周围的环境遮挡信息。通过组合导航输出的姿态信息,可以把卫星位置映射到该图片上,进行卫星是否可视的判断,依据可视情况实时调整量测更新时每颗卫星的权重,降低nlos对定位结果的影响。
[0053]
实施例2
[0054]
在智能手机的定位中,可以充分利用手机上gnss、加速度计、陀螺仪、磁力计、相机等传感器实施本发明中提到的方法,对于搭载了鱼眼镜头的手机,可直接使用原始鱼眼镜头来辅助nlos探测,对于未搭载鱼眼镜头的相机,也可以通过外接一个低成本的鱼眼镜头实现相应功能。通过android开放的api接口,获取相应的传感器数据,在得到数据后,具体的实施方案同实施例1。
[0055]
以上,仅是本发明的较佳实施例而已,并非对本发明作其他形式的限制,任何熟悉本专业的技术人员可能利用上述揭示的技术内容加以变更或改型为等同变化的等效实施例应用于其他领域,但是凡是未脱离本发明技术方案内容,依据本发明的技术实质对以上实施例所做的任何简单修改、等同变化与改型,仍属于本发明技术方案的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1