扫描装置的控制方法、电子设备及激光雷达与流程
本技术属于激光雷达,尤其涉及扫描装置的控制方法、电子设备及激光雷达。
背景技术:
1、现有技术中,当一个激光雷达系统包括多个扫描装置时,一般是分别规划各个扫描装置的运动轨迹。在激光雷达装配在汽车、机器人等设备上后,在设备的运行过程中,会出现设备颠簸的情况,进而导致激光雷达在外力的干扰下发生移动。由于惯性的存在会使扫描装置的位置或者角速度发生变化。当存在多个扫描装置时,则可能导致各扫描装置的位置或者角速度发生变化的程度不同,从而会导致激光束的扫描轨迹发生严重的形变,使得扫描轨迹的重复度较差,因此影响雷达的探测性能。
技术实现思路
1、有鉴于此,本技术实施例提供了扫描装置的控制方法、电子设备及激光雷达,以解决现有的扫描装置的控制方法中,激光束形成的扫描轨迹的重复度较差的问题。
2、本技术实施例的第一方面提供了一种扫描装置的控制方法,应用于激光雷达,所述激光雷达包括激光发射装置以及至少两个扫描装置,所述激光发射装置发射的激光束经所述至少两个扫描装置反射后射向探测区域,所述方法包括:
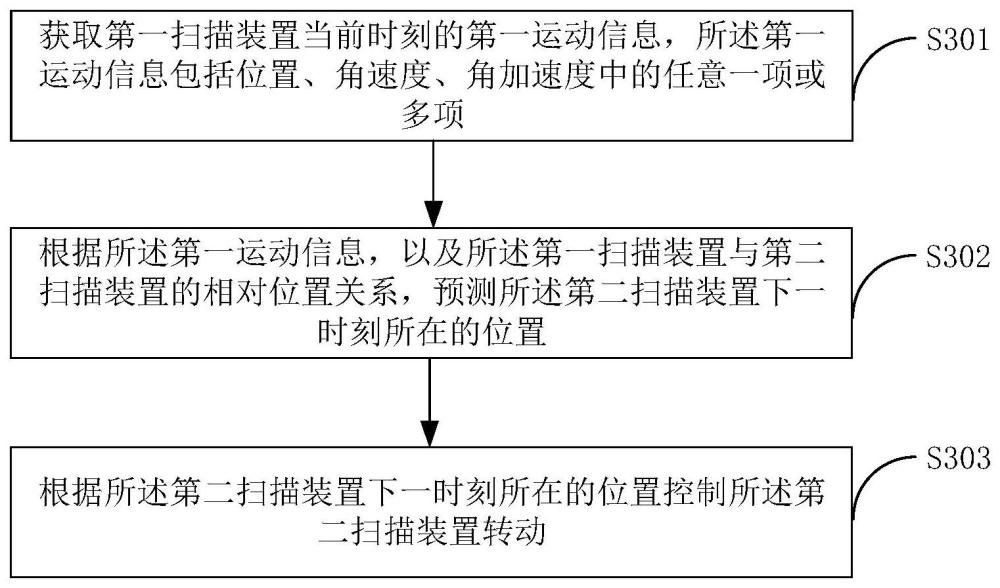
3、获取第一扫描装置当前时刻的第一运动信息,所述第一运动信息包括位置、角速度、角加速度中的任意一项或多项,所述第一扫描装置是所述至少两个扫描装置中的其中一个;
4、根据所述第一运动信息,以及所述第一扫描装置与第二扫描装置的相对位置关系,预测所述第二扫描装置下一时刻所在的位置,所述第二扫描装置是所述至少两个扫描装置中的其中一个;
5、根据所述第二扫描装置下一时刻所在的位置控制所述第二扫描装置转动。
6、在一实施例中,所述第一运动信息包括所述位置、所述角速度以及所述角加速度,所述根据所述第一运动信息,以及所述第一扫描装置与所述第二扫描装置的相对位置关系,预测所述第二扫描装置下一时刻所在的位置,包括:
7、根据所述第一运动信息,以及所述第一扫描装置与所述第二扫描装置的相对位置关系,确定所述第二扫描装置当前时刻的理论位置、理论角速度以及理论角加速度;
8、根据所述第二扫描装置当前时刻的理论位置、理论角速度以及理论角加速度以及所述第二扫描装置的运动模型,确定所述第二扫描装置下一时刻所在的位置。
9、在一实施例中,所述第一运动信息包括所述位置、所述角速度以及所述角加速度,所述根据所述第一运动信息,以及所述第一扫描装置与所述第二扫描装置的相对位置关系,预测所述第二扫描装置下一时刻所在的位置,包括:
10、根据所述第一运动信息以及所述第一扫描装置的运动模型,确定所述第一扫描装置下一时刻所在的位置;
11、根据所述第一扫描装置下一时刻所在的位置以及所述第一扫描装置与所述第二扫描装置的相对位置关系,确定所述第二扫描装置下一时刻所在的位置。
12、在一实施例中,在所述确定所述第一扫描装置下一时刻所在的位置之后,所述方法还包括:
13、根据所述第一扫描装置下一时刻所在的位置以及预先规划的所述第一扫描装置的运动轨迹,调整所述第一扫描装置的角速度和/或角加速度。
14、在一实施例中,在所述获取第一扫描装置当前时刻的第一运动信息之前,所述方法还包括:
15、获取所述至少两个扫描装置的惯量;
16、若所述至少两个扫描装置的惯量之间的差值大于预设差值,将惯量最大的扫描装置作为所述第一扫描装置。
17、在一实施例中,在所述获取所述至少两个扫描装置的惯量之后,所述方法还包括:
18、若所述至少两个扫描装置的惯量之间的差值小于或等于所述预设差值,将速度最大的扫描装置作为所述第一扫描装置。
19、在一实施例中,所述第一扫描装置是转镜,所述第二扫描装置是振镜,所述激光发射装置发射的激光经过所述振镜反射后射向所述转镜,并经所述转镜反射后射向所述探测区域。
20、在一实施例中,所述方法还包括:
21、根据所述第一运动信息确定所述第一扫描装置转过预设角度间隔的第一时长,将所述第一时长作为相邻两束激光束的发射时间间隔。
22、在一实施例中,所述方法还包括:
23、确定所述第一扫描装置转动至预设的第一位置的第一时刻,以及所述第一扫描装置转动至预设的第二位置的第二时刻;
24、控制所述激光发射装置在所述第一时刻开始发射激光束,在所述第二时刻结束发射激光束。
25、在一实施例中,所述第一时刻是时间同步信号窄脉冲的上升沿时刻,在所述确定所述第一扫描装置转动至预设的第一位置的第一时刻之前,所述方法还包括:
26、调整所述第一扫描装置的角速度,使所述第一扫描装置在所述第一时刻转动至所述第一位置。
27、本技术实施例的第二方面提供了一种扫描装置的控制装置,应用于激光雷达,所述激光雷达包括激光发射装置以及至少两个扫描装置,所述激光发射装置发射的激光束经所述至少两个扫描装置反射后射向探测区域,所述装置包括:
28、获取模块,用于获取第一扫描装置当前时刻的第一运动信息,所述第一运动信息包括位置、角速度、角加速度中的任意一项或多项,所述第一扫描装置是所述至少两个扫描装置中的其中一个;
29、预测模块,用于根据所述第一运动信息,以及所述第一扫描装置与第二扫描装置的相对位置关系,预测所述第二扫描装置下一时刻所在的位置,所述第二扫描装置是所述至少两个扫描装置中的其中一个;
30、控制模块,用于根据所述第二扫描装置下一时刻所在的位置控制所述第二扫描装置转动。
31、在一实施例中,所述第一运动信息包括所述位置、所述角速度以及所述角加速度,所述预测模块具体用于:
32、根据所述第一运动信息,以及所述第一扫描装置与所述第二扫描装置的相对位置关系,确定所述第二扫描装置当前时刻的理论位置、理论角速度以及理论角加速度;
33、根据所述第二扫描装置当前时刻的理论位置、理论角速度以及理论角加速度以及所述第二扫描装置的运动模型,确定所述第二扫描装置下一时刻所在的位置。
34、在一实施例中,所述第一运动信息包括所述位置、所述角速度以及所述角加速度,所述预测模块具体用于:
35、根据所述第一运动信息以及所述第一扫描装置的运动模型,确定所述第一扫描装置下一时刻所在的位置;
36、根据所述第一扫描装置下一时刻所在的位置以及所述第一扫描装置与所述第二扫描装置的相对位置关系,确定所述第二扫描装置下一时刻所在的位置。
37、在一实施例中,所述控制模块还用于:
38、根据所述第一扫描装置下一时刻所在的位置以及预先规划的所述第一扫描装置的运动轨迹,调整所述第一扫描装置的角速度和/或角加速度。
39、在一实施例中,所述获取模块还用于:
40、获取所述至少两个扫描装置的惯量;
41、若所述至少两个扫描装置的惯量之间的差值大于预设差值,将惯量最大的扫描装置作为所述第一扫描装置。
42、在一实施例中,所述获取模块还用于:
43、若所述至少两个扫描装置的惯量之间的差值小于或等于所述预设差值,将速度最大的扫描装置作为所述第一扫描装置。
44、在一实施例中,所述第一扫描装置是转镜,所述第二扫描装置是振镜,所述激光发射装置发射的激光经过所述振镜反射后射向所述转镜,并经所述转镜反射后射向所述探测区域。
45、在一实施例中,所述控制模块还用于:
46、根据所述第一运动信息确定所述第一扫描装置转过预设角度间隔的第一时长,将所述第一时长作为相邻两束激光束的发射时间间隔。
47、在一实施例中,所述控制模块还用于:
48、确定所述第一扫描装置转动至预设的第一位置的第一时刻,以及所述第一扫描装置转动至预设的第二位置的第二时刻;
49、控制所述激光发射装置在所述第一时刻开始发射激光束,在所述第二时刻结束发射激光束。
50、在一实施例中,所述第一时刻是时间同步信号窄脉冲的上升沿时刻,所述控制模块还用于:
51、调整所述第一扫描装置的角速度,使所述第一扫描装置在所述第一时刻转动至所述第一位置。
52、本技术实施例的第三方面提供了一种电子设备,包括存储器、处理器以及存储在所述存储器中并可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现如上述第一方面所述的扫描装置的控制方法。
53、本技术实施例的第四方面提供了一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,所述计算机程序被处理器执行时实现如上述第一方面所述的扫描装置的控制方法。
54、本技术实施例的第五方面提供了一种计算机程序产品,当计算机程序产品在电子设备上运行时,使得电子设备执行上述第一方面中任一项所述的扫描装置的控制方法。
55、本技术实施例的第六方面提供了一种激光雷达,包括激光发射装置、第一扫描装置、第二扫描装置以及如上述第三方面所述的电子设备。
56、本技术实施例与现有技术相比存在的有益效果是:通过获取第一扫描装置当前时刻的位置、角速度、角加速度中的任意一项或多项,结合第一扫描装置与第二扫描装置的相对位置关系,预测第二扫描装置下一时刻所在的位置,再根据第二扫描装置下一时刻所在的位置控制第二扫描装置转动,从而可以使第二扫描装置跟随第一扫描装置转动,实现第一扫描装置和第二扫描装置的同步,补偿外力干扰下第一扫描装置的转速变化,使得第一扫描装置和第二扫描装置的相对位置与实际设定的相对位置之间的误差减小,从而提高了激光束形成的扫描轨迹的重复度,进而可以提高激光雷达的探测性能。
- 还没有人留言评论。精彩留言会获得点赞!