基于RTK和SBAS的定位方法、装置、终端设备及存储介质与流程
本技术涉及卫星导航定位,具体涉及一种基于rtk和sbas的定位方法、装置、终端设备及存储介质。
背景技术:
1、rtk(real-time kinematic,实时动态)载波相位差分技术是一种被广泛应用于各类实时高精度应用场景下。具体通过建立gnss地面参考站,将参考站的准确位置坐标,以及相应的码伪距、载波相位测量值等“观测域”差分数据,通过地面网络、无线电台等方式,实时提供给参考站附近的用户,用户依此可以通过观测值做差方式,消除卫星轨道和钟差、大气延迟、接收机钟差等各类误差,并利用滤波算法快速获取高精度定位结果。而rtk服务中一般直接将参考站处的观测码伪距和载波相位值作为差分数据播发给用户,若差分数据的质量无法得到有效保证,则导致用户定位精度无法满足要求。
技术实现思路
1、本技术实施例公开了一种基于rtk和sbas的定位方法、装置、终端设备及存储介质,能够对rtk定位过程中的差分数据完好性进行监测,从而提高定位的精度和可靠性。
2、本技术实施例第一方面提供一种基于rtk和sbas的定位方法,所述方法包括:
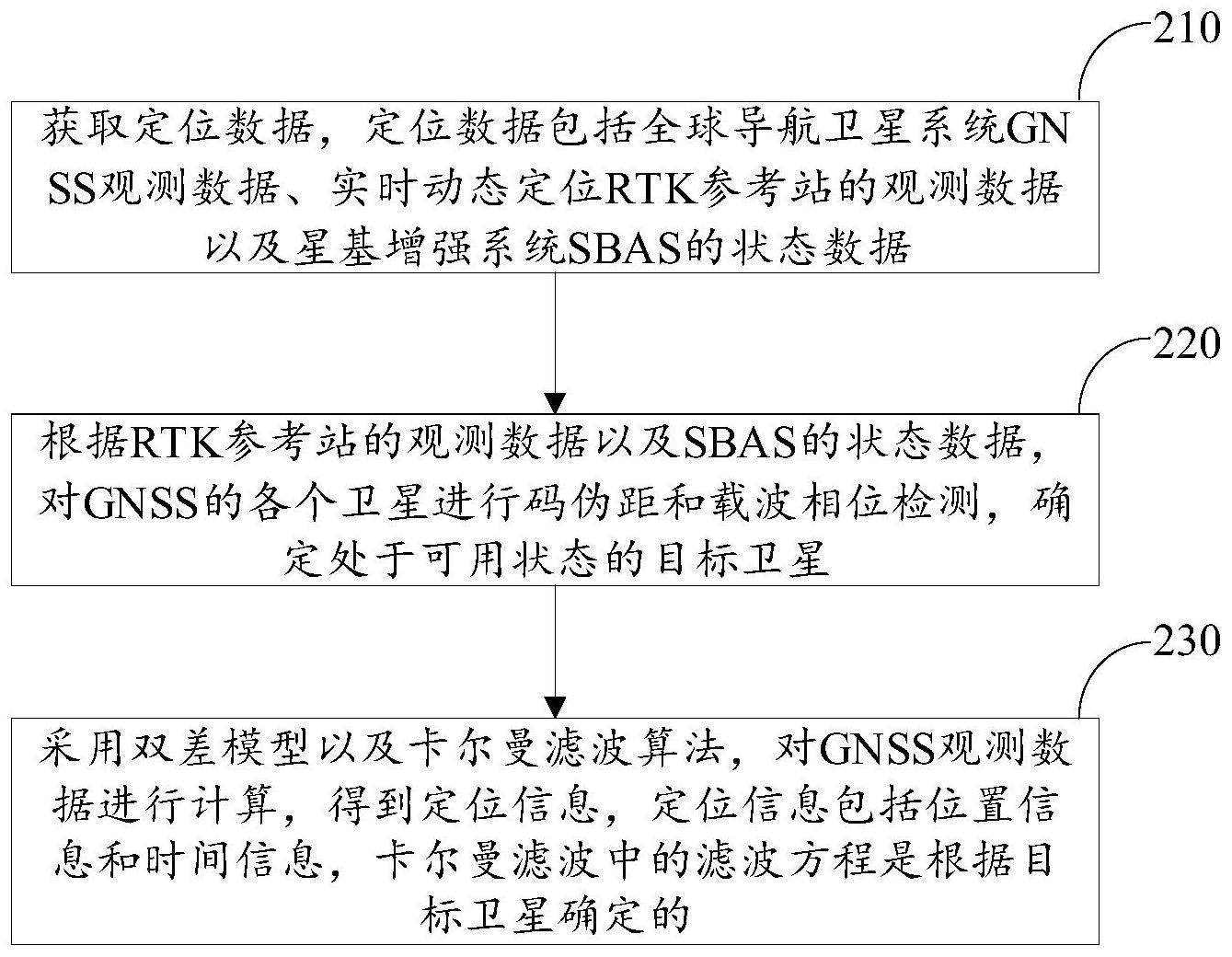
3、获取定位数据,所述定位数据包括全球导航卫星系统gnss观测数据、实时动态定位rtk参考站的观测数据以及星基增强系统sbas的状态数据;
4、根据所述rtk参考站的观测数据以及所述sbas的状态数据,对所述gnss的各个卫星进行码伪距和载波相位检测,确定处于可用状态的目标卫星;
5、采用双差模型以及卡尔曼滤波算法,对所述gnss观测数据进行计算,得到定位信息,所述定位信息包括位置信息和时间信息,所述卡尔曼滤波中的滤波方程是根据所述目标卫星确定的。
6、作为一种可选的实施方式,在本实施例的第一方面中,所述sbas的状态数据包括sbas的改正数据和sbas的完好性数据;所述根据所述rtk参考站的观测数据以及所述sbas的状态数据,对所述gnss的各个卫星进行码伪距和载波相位检测,确定处于可用状态的目标卫星,包括:
7、根据所述sbas的完好性数据确定所述各个卫星的初始化检测状态;
8、根据所述rtk参考站的观测数据、sbas的改正数据以及所述rtk参考站的坐标信息,对所述gnss的各个卫星进行码伪距和载波相位检测,并根据检测结果对所述各个卫星的初始化检测状态进行修正,得到所述各个卫星的修正后的检测状态;
9、根据所述各个卫星的修正后的检测状态,确定处于可用状态的目标卫星。
10、作为一种可选的实施方式,在本实施例的第一方面中,根据所述sbas的完好性数据确定所述各个卫星的初始化检测状态,包括:
11、根据所述sbas的完好性数据,获取所述各个卫星对应的sbas完好性参数;
12、根据所述各个卫星对应的sbas完好性参数与检测阈值之间的大小关系,确定所述各个卫星的初始化检测状态,其中,当目标卫星对应的sbas完好性参数大于所述检测阈值,则确定所述目标卫星的初始化检测状态为降权可用状态,否则确定所述目标卫星的初始化检测状态为正常状态,所述目标卫星为所述各个卫星中的任意一个卫星。
13、作为一种可选的实施方式,在本实施例的第一方面中,所述rtk参考站的观测数据包括rtk伪距改正数据以及rtk载波相位改正数据;根据所述rtk参考站的观测数据、sbas的改正数据以及所述rtk参考站的坐标信息,对所述gnss的各个卫星进行码伪距和载波相位检测,并根据检测结果对所述各个卫星的初始化检测状态进行修正,得到所述各个卫星的修正后的检测状态,包括:
14、根据所述参考站坐标、rtk伪距改正数据以及sbas的改正数据计算所述gnss的各个卫星对应的码伪距残差值,并且根据所述参考站坐标、rtk载波相位改正数据以及sbas的改正数据计算所述gnss的各个卫星对应的载波相位残差值;
15、根据所述各个卫星对应的码伪距残差值计算各个卫星对应的码伪距残差单差值,并根据所述各个卫星对应的码伪距残差单差值以及第一检测门限确定所述各个卫星的码伪距检测结果;
16、根据所述各个卫星对应的载波相位残差值计算各个卫星对应的整周模糊度,并根据第二检测门限以及所述各个卫星对应的整周模糊度确定所述各个卫星的载波相位检测结果;
17、根据所述各个卫星的码伪距检测结果和载波相位检测结果对所述各个卫星的初始化检测状态进行修正,得到所述各个卫星的修正后的检测状态。
18、作为一种可选的实施方式,在本实施例的第一方面中,所述根据所述各个卫星对应的码伪距残差值计算各个卫星对应的码伪距残差的单差值,并根据所述各个卫星对应的码伪距残差的单差值以及第一检测门限确定所述各个卫星的码伪距检测结果,包括:
19、从所述初始化检测状态为正常状态的各个卫星中选取仰角最大的卫星确定为参考卫星,并将所述参考卫星以外的所述初始化检测状态为正常状态的各个卫星以及所述初始化检测状态为降权可用状态的卫星确定为其他卫星;
20、将所述参考卫星对应的码伪距残差值与第一其他卫星对应的码伪距残差值之间的差值作为所述第一其他卫星对应的码伪距残差单差值,所述第一其他卫星为所述各个其他卫星中的任意一个;
21、当第一其他卫星对应的码伪距残差单差值大于第一检测门限的情况下,确定所述第一其他卫星的码伪距检测结果为码伪距不可用,否则为码伪距可用。
22、作为一种可选的实施方式,在本实施例的第一方面中,所述根据所述各个卫星对应的载波相位残差值计算各个卫星对应的整周模糊度,并根据第二检测门限以及所述各个卫星对应的整周模糊度确定所述各个卫星的载波相位检测结果,包括:
23、根据所述各个卫星对应的载波相位残差值计算所述各个卫星对应的整周模糊度;
24、通过载波相位时序平滑算法对所述各个卫星对应的整周模糊度进行判定,并在判定所述第一卫星对应的整周模糊度成功固定的情况下,根据所述第一卫星对应的整周模糊度对所述第一卫星对应的载波相位残差值进行修正,得到所述第一卫星对应的修正后的载波相位残差值,所述第一卫星为所述各个卫星中的任意一个;
25、当所述第一卫星对应的修正后的载波相位残差值大于第二检测门限的情况下,确定所述第一卫星的载波相位检测结果为载波不可用,否则为载波可用;
26、当判定所述第一卫星对应的整周模糊度无法成功固定的情况下,确定所述第一卫星的载波相位检测结果为载波不可用。
27、作为一种可选的实施方式,在本实施例的第一方面中,所述根据所述各个卫星的码伪距检测结果和载波相位检测结果对所述各个卫星的初始化检测状态进行修正,得到所述各个卫星的修正后的检测状态,包括:
28、当所述某一卫星的码伪距检测结果为码伪距可用,且载波相位检测结果为载波可用的情况下,对所述某一卫星的初始检测状态不进行修正;
29、当所述某一卫星的载波相位检测结果为载波不可用的情况下,对所述某一卫星的初始检测状态修正为载波不可用状态;
30、当所述某一卫星的码伪距检测结果为码伪距不可用,且载波相位检测结果为载波可用的情况下,对所述某一卫星的初始检测状态修正为码伪距不可用状态;
31、所述根据所述各个卫星的修正后的检测状态,确定处于可用状态的目标卫星,包括:
32、将处于所述正常状态、降权可用状态以及码伪距不可用状态的卫星确定为处于可用状态的目标卫星。
33、作为一种可选的实施方式,在本实施例的第一方面中,所述采用双差模型以及卡尔曼滤波算法,对所述gnss观测数据进行计算,得到定位信息,所述定位信息包括位置信息和时间信息,所述卡尔曼滤波中的滤波方程是根据所述目标卫星确定的,包括:
34、根据所述处于所述可用状态的目标卫星的卫星构建卡尔曼滤波算法中的滤波方程以及双差模型,并且根据处于所述降权可用状态以及处于所述码伪距不可用状态的目标卫星对卡尔曼滤波算法中的滤波方程的噪声矩阵进行调整,得到调整后的卡尔曼滤波算法;
35、采用双差模型以及所述调整后的卡尔曼滤波算法,对所述gnss观测数据进行计算,得到定位信息,所述定位信息包括位置信息和时间信息。
36、作为一种可选的实施方式,在本实施例的第一方面中,所述方法还包括:
37、根据所述定位信息以及rtk参考站的观测数据确定gnss的各个卫星对应的码伪距残差数据和载波相位残差数据;
38、根据所述各个卫星对应的码伪距残差数据和载波相位残差数据对所述定位信息进行校验;
39、当所述定位信息校验通过的情况下,输出所述定位信息。
40、作为一种可选的实施方式,在本实施例的第一方面中,在根据所述各个卫星对应的码伪距残差数据和载波相位残差数据对所述定位信息进行校验之后,所述方法还包括:
41、当所述定位信息校验不通过的情况下,根据所述各个卫星对应的码伪距残差数据构建码伪距残差序列,根据所述各个卫星对应的载波相位残差构建载波相位残差序列,并计算所述码伪距残差序列的第一中值和第一均值,以及计算所述载波相位残差序列的第二中值和第二均值;
42、根据所述第一中值和第一均值确定第一比例系数,根据所述第二中值和第二均值确定第二比例系数;
43、当所述第一比例系数小于比例系数阈值,和/或,所述第二比例系数小于所述比例系数阈值的情况下,将参考卫星确定为处于载波不可用状态的卫星,所述参考卫星为从处于所述正常状态的各个目标卫星中选取的仰角最大的目标卫星;
44、当所述第一比例系数大于或者等于所述比例系数阈值,以及所述第二比例系数大于或者等于所述比例系数阈值的情况下,将处于所述码伪距不可用,和/或,所述降权可用状态的目标卫星确定为处于载波不可用状态的卫星。
45、作为一种可选的实施方式,在本实施例的第一方面中,在将参考卫星确定为处于载波不可用状态的卫星之后,或者,在将处于所述码伪距不可用,和/或,所述降权可用状态的目标卫星确定为处于载波不可用状态的卫星之后,再次执行采用双差模型以及卡尔曼滤波算法,对所述gnss观测数据进行计算,得到定位信息,以及,根据所述码伪距残差数据和载波相位残差数据对所述定位信息进行校验的步骤及后续步骤。
46、本技术实施例第二方面提供一种基于rtk和sbas的定位装置,所述装置包括:
47、数据获取模块,用于获取定位数据,所述定位数据包括全球导航卫星系统gnss观测数据、实时动态定位rtk参考站的观测数据以及星基增强系统sbas的状态数据;
48、数据检测模块,用于根据所述rtk参考站的观测数据以及所述sbas的状态数据,对所述gnss的各个卫星进行码伪距和载波相位检测,确定处于可用状态的目标卫星;
49、卫星定位模块,用于采用双差模型以及卡尔曼滤波算法,对所述gnss观测数据进行计算,得到定位信息,所述定位信息包括位置信息和时间信息,所述卡尔曼滤波中的滤波方程是根据所述目标卫星确定的。
50、本技术实施例第三方面提供一种终端设备,包括存储器及处理器,所述存储器中存储有计算机程序,所述计算机程序被所述处理器执行时,使得所述处理器实现本技术实施例公开的任意一种基于rtk和sbas的定位方法。
51、本技术实施例第四方面提供一种计算机可读存储介质,其存储计算机程序,其中,所述计算机程序被处理器执行时实现本技术实施例公开的任意一种基于rtk和sbas的定位方法。
52、与相关技术相比,本技术实施例具有以下有益效果:
53、通过获取包含了全球导航卫星系统gnss观测数据、实时动态定位rtk参考站的观测数据以及星基增强系统sbas的状态数据的定位数据,根据其中的rtk参考站的观测数据以及sbas的状态数据对gnss的各个卫星进行码伪距检测和载波相位检测,确定处于可用状态的目标卫星,并根据处于可用状态的目标卫星构建卡尔曼滤波算法中的滤波方程,最终通过卡尔曼滤波算法以及双差模型对gnss观测数据进行处理,得到定位信息,能够同时接收rtk差分数据和sbas差分数据,综合利用参考站精准坐标、用户定位解算结果等信息对rtk定位过程中的差分数据完好性进行监测,从而提高定位的精度和可靠性。
- 还没有人留言评论。精彩留言会获得点赞!