一种用于模拟滑坡诱发堰塞体堵江的离心模型试验装置和方法
1.本发明属于土木工程领域,尤其涉及一种用于滑坡诱发的堰塞体堵江的离心模型试验装置和方法。
背景技术:
2.山区沿江两岸的大型斜坡体或高边坡,在地震、暴雨等灾害荷载下极易发生破坏失稳,滑坡体以一定的速度向河谷方向运动,在运动过程中由于各种阻力使动力不断减小,最后终止于河床中某一位置或到达对岸经山体碰撞而破碎解体,造成滑坡堵江并形成堰塞坝。堰塞坝往往寿命极短且可诱发一连串次生地质灾害,并引发区域性大型地质灾害链,其形成和溃决可造成大量的人员伤亡和财产损失,给沿江大型水利工程、水电设施、交通航运、公路铁路等工程领域的建设和运营带来极大危害。为了能够尽量减小灾害带来的损失,亟需对滑坡堵江的形成及演化全过程开展系统性的研究。
3.在科学研究领域,物理模拟试验是发现事物客观性质、揭示事物发展规律的重要手段,而超重力物理模拟具有缩尺、缩时和还原真实应力状态的特点。因此使用离心机提供超重力,对滑坡堵江的形成及演化过程开展系统性研究,能够揭示堰塞体发生堵江所需的自然条件,并模拟堵江过程中堰塞体形态的演变规律。目前未见有利用超重力手段进行试验模拟滑坡诱发的堰塞体堵江的离心模型试验装置。
技术实现要素:
4.本发明旨在提出一种能够再现真实应力水平作用下,滑坡诱发的堰塞体堵江的形成及演化全过程的超重力离心模型试验装置和方法。
5.为了实现上述目的,本发明所采用的技术方案是:
6.一种用于模拟滑坡诱发堰塞体堵江的离心模型试验装置,包括伺服控制系统、监测传感系统、模型箱箱体、以及安装在模型箱箱体内的河道模型、边坡滑动模型;所述的河道模型与边坡滑动模型铰接,边坡滑动模型的高度不低于边坡滑动模型的高度;
7.所述的河道模型包括顶部敞开的双层箱体、河道闸门组件、过滤装置和水泵组件;所述的水泵组件的出水口与双层箱体的上层进水口连通,水泵组件的回水口与双层箱体的下层出水口连通,闸门组件安装在双层箱体的上层,用于控制水流量;双层箱体的上层和下层之间设有过滤装置;双层箱体的底部固定在模型箱箱体内;
8.所述的边坡滑动模型包括角度调节机构、一端开口的滑坡槽、以及位于滑坡槽内的储料箱,所述的储料箱在滑坡槽内的位置可调;所述的滑坡槽在角度调节机构的作用下,相对于河道模型能够实现0-90
°
范围的倾斜;
9.所述的伺服控制系统用于控制河道模型的水动力条件和边坡滑动模型的滑坡动力条件,所述的监测传感系统用于获取试验参数。
10.进一步地,所述的河道模型中顶部敞开的双层箱体由隔板分隔为上下两层,上层
和下层在远离上层进水口的位置处通过过滤装置相连通;
11.所述的河道闸门组件包括第一闸门和第二闸门,所述的第一闸门安装在上层中靠近进水口位置,第一水闸将上层分为缓冲池和水槽;所述的第二闸门安装在水槽的尾部,处于过滤装置的上游;所述的水槽上游位置与滑坡槽的开口端铰接;
12.所述双层箱体中的下层为储水箱,由过滤装置过滤后的水储存在储水箱内,用于向水泵组件供水,实现水循环。
13.进一步地,所述的双层箱体内的隔板上设有过滤槽,所述的过滤槽位于水槽的中后部且处于第二闸门的上游。
14.进一步地,所述的过滤槽的宽度与水槽宽度相等。
15.进一步地,所述的水泵组件包括往复式水泵和输水管路,往复式水泵的出水口通过输水管路与双层箱体的上层进水口连通,往复式水泵的回水口通过输水管路与双层箱体的下层出水口连通。
16.进一步地,所述的边坡滑动模型中的角度调节机构包括第一滑轨和可伸缩式支撑杆,所述的第一滑轨固定在模型箱箱体内,所述的可伸缩式支撑杆顶部与滑坡槽的末端铰接,可伸缩式支撑杆底部安装在第一滑轨上。
17.进一步地,所述的储料箱的前端出料口设置有第三闸门,储料箱内设有推料板,所述的推料板与储料箱的后板之间通过弹簧连接,第三阀门和推料板均由伺服动作器控制启动。
18.进一步地,所述的监测传感系统包括液位传感器、流量传感器和高速相机组,所述的液位传感器用于安装监测河道模型中缓冲池内水位高度;所述的流量传感器用于监测监测河道模型中水槽内的水流量,包括流入水槽的水流量和流出水槽的水流量;所述的高速相机组用于监测边坡滑动模型中滑坡槽落下的滑坡体材料和河道模型中的水流信息;
19.所述的高速相机组包括用于监测滑坡槽的运动相机和用于监测水槽的运动相机,其中,用于监测滑坡槽的运动相机的拍摄方向与水槽方向平行且与滑坡槽方向垂直;用于监测水槽的运动相机由上至下垂直拍摄水槽,若干运动相机的拍摄范围的重合度超过50%。
20.进一步地,所述的伺服控制系统包括伺服动作器组、远程控制器、伺服控制器控制单元、中央处理器和数据采集中心;所述的数据采集中心用于获取监测传感系统的监测数据,中央处理器用于根据获取的监测数据进行处理,得到伺服控制器组的控制信号,并由伺服控制器控制单元通过远程控制器控制伺服动作器组工作;所述的伺服动作器组用于分别控制控制水槽内水流流速、水槽内的水流量、滑坡槽的滑坡角度和滑坡高度、以及滑坡槽内滑坡材料的释放。
21.一种基于上述的用于模拟滑坡诱发堰塞体堵江的离心模型试验装置的试验方法,包括:
22.(一)准备阶段:
23.根据试验条件调整储料箱位置、滑坡槽倾斜角度,在储料箱内加入滑坡体材料和智能颗粒传感器,所述的智能颗粒传感器用于监测滑坡轨迹和受力情况;
24.将模型箱体安装在离心机吊篮上,在离心超重力环境下开展试验;
25.(二)模拟试验阶段:
26.首先,调节缓冲池与水槽间的第一闸门至规定水位,控制水泵组件通过缓冲池向水槽供水,水槽内水流由过滤装置过滤后进入水槽下方的储水箱中,实现水流循环;调节水槽与过滤装置间的第二闸门至规定水位,待水位稳定后控制水泵组件的供水流量,得到符合试验要求的河道水流速度;
27.接着,控制储料箱出料口处的第三闸门打开,启动推料板,将储料箱内的滑坡体材料释放,滑坡体材料顺着倾斜的滑坡槽落入水槽内,模拟滑坡运动过程;滑坡体材料在水槽堆积后形成堰塞体,阻挡水槽中的水流,部分滑坡体材料被流水冲击后,通过过滤槽初步沉积滑坡体材料,再通过过滤装置进行过滤;
28.在模拟试验阶段中,实时监测堰塞体几何形态、水槽内的水位、第一水闸和第二水闸处的水流流量、以及滑坡体材料的速度、受力和滑坡轨迹。
29.(三)试验数据处理:
30.终止试验并拆机,分析试验数据,获得堵江时间和堰塞体几何形态变化特征;通过平行拍摄滑坡槽的运动相机数据,得到滑坡的速度位移特征;根据流量传感器数据得到流量开始减缓到完全停止的时刻,从而得到堰塞体堵塞水槽的时间,即堵江时间;提取不同时刻下用于监测水槽的运动相机的同一帧画面,得到不同时刻下水槽中的滑坡体材料的几何特征,对比不同时刻下堰塞体的堆积高度、长度,获得堰塞体几何形态变化特征。
31.本发明专利的有益效果如下:
32.1.本发明实现了在离心超重力环境下模拟滑坡诱发堰塞体堵江成坝全过程,能够模拟滑动路径距离、滑坡路径倾斜角及滑坡速度等多种滑坡动力条件,以及能够模拟河流水位、水流速度等多项水动力条件。
33.2.本发明通过传感器采集水槽的液位信息以及水槽内的供水流量信息,并处理信息数据,通过对伺服作动器的控制,采用往复式水泵平稳水流流量,实现离心超重力条件下提供大流量连续水流,达到输出流量精确控制的目的。
34.3.本发明通过设置高速运动相机通过透明视窗拍摄试验过程,结合图像测速技术(piv)对滑坡体的速度场进行定量分析,能够准确反应试验中滑坡体速度的变化情况;并且通过多台运动相机对滑坡体进入河道时同一时刻的堆积状态进行拍摄,提取二维图像,再使用三维重建方法,对这一时刻堰塞体的堆积形态进行三维建模。
35.4.本发明通过在滑坡材料中混入“智能颗粒”超小型耐高温传感器,实时监测滑坡体在进入水道与堵江过程中的运动轨迹与受力情况,能够从细观角度揭示滑坡堵江过程中滑坡材料的堆积特性与分选机制。
36.综上,本发明基于超重力模型试验,通过离心装置提供超重力,能够还原真实应力状态下的滑坡堵江成坝过程,可实现对滑坡堵江的形成及演化过程的系统性研究,揭示堰塞体发生堵江所需的力学条件,并模拟堵江过程中堰塞体形态的演变规律。
附图说明
37.为了更清楚地说明本发明实施方式的技术方案,下面将对实施方式中所需要使用的附图作简单地介绍,应当理解,以下附图仅示出了本发明的某些实施例,因此不应被看作是对范围的限定,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他相关的附图。
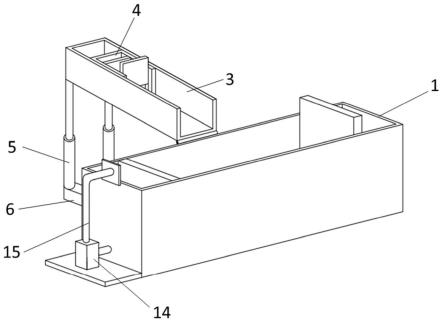
38.图1是本发明实施例提供的试验装置整体结构示意图;
39.图2是本发明实施例提供的河道模型内部结构示意图
40.图3是本发明实施例提供的边坡滑动模型内部结构示意图;
41.图4是本发明实施例提供的滑坡槽与河道模型箱连接示意图;
42.图5是本发明实施例提供的可调节支撑杆运行装置示意图;
43.图6是本发明实例提供的工作原理图;
44.图中:1-河道模型、2-边坡滑动模型、3-滑坡槽、4-储料箱、5-可伸缩式支撑杆、6-第一滑轨、7-水槽;8-缓冲池、9-第一水闸、10-第二水闸、11-过滤槽、12-储水箱、13-过滤装置、14-往复式水泵、15-输水管路、16-第二滑轨;17-推料板、18-第三闸门、19-球形铰链。
具体实施方式
45.为使本发明实施方式的目的、技术方案和优点更加清楚,下面将结合本发明实施方式中的附图,对本发明实施方式中的技术方案进行清楚、完整地描述,显然,所描述的实施方式是本发明一部分实施方式,而不是全部的实施方式。基于本发明中的实施方式,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施方式,都属于本发明保护的范围。
46.利用超重力技术能够达到缩尺、缩时和还原真实应力状态的相关目的,本发明使用离心机提供超重力,对滑坡堵江的形成及演化过程开展系统性研究,能够揭示堰塞体发生堵江所需的自然条件,并模拟堵江过程中堰塞体形态的演变规律。
47.如图1所示,本实施例提供的一种用于模拟滑坡诱发堰塞体堵江的离心模型试验装置,包括伺服控制系统、监测传感系统、模型箱箱体、以及安装在模型箱箱体内的河道模型1、边坡滑动模型;如图4所示,所述的河道模型1与边坡滑动模型铰接,边坡滑动模型的高度不低于边坡滑动模型的高度;河道模型为通过3d打印技术建立的河道模型,能够还原真实的河道形貌。
48.所述的模型箱箱体作为试验装置的外壳,模型箱箱体上设有可视窗口,可视窗口至少位于模型箱箱体的顶部以及侧壁上,用于观察和记录试验画面;除运动相机安装在模型箱箱体外的可视窗口处之外,其余结构均位于模型箱箱体内部。本实施例中,模型箱箱体由钢结构制成且应能保证模型箱变形和强度适应ng重力加速度以及承载试验模型的要求,所述模型箱箱体可安装在离心机吊篮上;此外,在模型箱箱体上设置固定夹板,用来固定模型箱箱体与内部结构。在可视窗外部安装高速相机组件,可实时拍摄试验过程,高速相机组件的结构由用于补光的灯带、用于拍摄的高速相机及安装套件构成。
49.所述的河道模型包括顶部敞开的双层箱体、河道闸门组件、过滤装置13和水泵组件;所述的水泵组件的出水口与双层箱体的上层进水口连通,水泵组件的回水口与双层箱体的下层出水口连通,闸门组件安装在双层箱体的上层,用于控制水流量;双层箱体的上层和下层之间设有过滤装置;双层箱体的底部固定在模型箱箱体内。
50.如图3所示,所述的边坡滑动模型包括角度调节机构、一端开口的滑坡槽3、以及位于滑坡槽3内的储料箱4,所述的储料箱在滑坡槽内的位置可调;所述的滑坡槽在角度调节机构的作用下,相对于河道模型能够实现0-90
°
范围的倾斜。本实施例中,一端开口的滑坡槽的开口端为u型开口式设计。滑坡槽内设置第二滑轨,储料箱底部安装在第二滑轨上,通
过第二滑轨实现储料箱在滑坡槽内的位置可调,储料箱内用于存储滑坡材料和智能颗粒传感器,所述的智能颗粒传感器为尺寸与滑坡材料接近的超小型耐高温传感器,在滑坡材料中混入智能颗粒,能够实时有效地监测滑坡材料在入水与堵江过程中的运动轨迹与受力情况。
51.所述的伺服控制系统包括伺服控制器和若干个伺服动作器,用于控制河道模型的水动力条件和边坡滑动模型的滑坡动力条件,所述的监测传感系统用于获取试验参数。更具体的,所述的伺服控制系统用于控制控制河道模型中的水流流量、滑坡槽的倾斜角度、储料箱内推动板和储料箱内闸门等;所述的监测传感系统用于实时测量河道内水流流速、储料箱内滑坡材料混合情况、滑坡体在滑坡槽内运动情况与滑坡体入水后的堆积情况、滑坡材料在入水与堵江过程中的运动轨迹与受力情况等。
52.在本发明的一项具体实施中,如图2所示,所述的河道模型中,顶部敞开的双层箱体由隔板分隔为上下两层,隔板前端对应的入水口处将上下层密封,隔板后端留有缝隙,用于将上层的水流引入下层的储水箱中。上层和下层在远离上层进水口的位置处通过过滤装置相连通;本实施例中,过滤装置为一层或多层水砂分离器,位于下层的入水口处。
53.所述的河道闸门组件包括第一闸门9和第二闸门10,所述的第一闸门安装在上层中靠近进水口位置,第一水闸将上层分为缓冲池8和水槽7;所述的第二闸门安装在水槽的尾部,处于过滤装置的上游;所述的水槽上游位置与滑坡槽的开口端铰接;本实施例中,缓冲池内设置有液位传感器,第一闸门和第二闸门处设有流量传感器。
54.所述双层箱体中的下层为储水箱,由过滤装置过滤后的水储存在储水箱内,用于向水泵组件供水,实现水循环。
55.所述的双层箱体内的隔板上设有过滤槽11,所述的过滤槽位于水槽的中后部且处于第二闸门的上游。本实施例中,所述的过滤槽的宽度与水槽宽度相等。
56.所述的水泵组件包括往复式水泵14和输水管路15,往复式水泵的出水口通过输水管路与双层箱体的上层进水口连通,往复式水泵的回水口通过输水管路与双层箱体的下层出水口连通。通过控制水泵的供水流量来模拟不同的河流流量条件。
57.所述水槽和缓冲池用于模拟河流运动并存储试验用水,上层水槽可用于模拟水流运动条件,下层储水箱可用于储水。所述缓冲池位于水槽上游,用以缓冲试验水流,缓冲池上的进水口与水泵组件的出水口连接;过滤槽用于过滤掉一部分的滑坡土体;过滤装置设置于用于将水体进一步过滤后回收至储水箱内用于循环;所述储水箱用于提供循环水流用水,储水箱上的出水口与水泵组件的进水口连接。通过伺服作动器控制往复式水泵泵运转,将水从储水箱抽出,并通过输水管路运送至缓冲池,水流漫过箱内堰塞体,通过过滤回收,返回储水箱,实现试验用水的循环利用。
58.在本发明的一项具体实施中,所述的边坡滑动模型中的角度调节机构包括第一滑轨6和可伸缩式支撑杆5,所述的第一滑轨固定在模型箱箱体内,所述的可伸缩式支撑杆顶部与滑坡槽的末端铰接,可伸缩式支撑杆底部安装在第一滑轨上。本实施例中,如图5所示,通过两个可伸缩式支撑杆底部安装在一对滑轨上,滑轨则固定在模型箱箱体的底部。一对可伸缩式支撑杆的顶部与滑坡槽的末端通过球形铰链19铰接。
59.所述的储料箱的前端出料口设置有第三闸门18,储料箱内设有推料板17,所述的推料板与储料箱的后板之间通过弹簧连接,第三阀门和推料板均由伺服动作器控制启动。
推料板既可以用于推动滑坡材料下落,也可用于控制滑坡材料的初始速度,第三闸门可用于模拟滑坡体滑动触发。
60.在本发明的一项具体实施中,在所述的滑坡槽侧方还设有用于实时测量滑坡体速度场的运动相机,通过拍摄滑坡体运动的实时图像,结合图像测速技术(piv)对滑坡体的速度场进行定量分析,能够准确反应试验中滑坡体速度的变化情况。本实施例中,用于监测滑坡槽的运动相机的拍摄方向与水槽方向平行且与滑坡槽方向垂直。
61.在本发明的一项具体实施中,在所述的水槽上方还设有多台用于实施测量堰塞体堆积形态的运动相机,本发明通过多台运动相机对滑坡体进入河道时同一时刻的堆积状态进行拍摄,提取二维图像,再使用三维重建方法,对这一时刻堰塞体的堆积形态进行三维建模。本实施例中,用于监测水槽的运动相机由上至下垂直拍摄水槽,主要拍摄摄滑坡材料进入水槽的区域,若干运动相机的拍摄范围的重合度超过50%,优选重合度超过60%。
62.上述中所述的运动相机、液位传感器、流量传感器构成了监测传感系统;其中,通过安装在河道模型的缓冲池的液位传感器,用于采集液位信息;通过安装在第一闸门位置的流量传感器,测量流入水槽的水流量,通过安装在第二闸门位置的流量传感器,测量流出水槽的水流量,观测堰塞体堆积过程中流量的变化情况;安装在滑坡槽末端的高速相机组件由多台运动相机组成,用于测量滑坡体的速度场,还原堰塞体堆积时的三维形态。
63.如图6所示,本发明的一项具体实施中,监测传感系统测得的数据被数据采集中心获取后,通过伺服控制系统来实现对河道模型中的水位、水流水流速度、水闸、边坡滑动模型中滑坡槽的倾斜角度、储料箱的控制;本实施例采用的伺服控制系统由中央处理器、伺服动作器控制单元、远程控制器和伺服控制器构成,所述的中央处理器获取数据采集中心的数据后,经中央处理器进行处理并反馈动作指令,该指令可由伺服动作器控制单元通过远程控制器传输至本地的伺服控制器,在本地装置中设置的伺服动作器分别用于实现水槽内水位高度、水流流速、水闸高度的调节与储料箱内闸门与推料板的控制等。例如,通过伺服动作器1控制水泵的功率,以达到实时控制水槽水流速度的效果。通过伺服动作器2通过控制水闸,改变水闸高度,以实现控制水槽内水流量的效果,第一水闸和第二水闸可单独控制。通过伺服动作器3控制可伸缩式支撑杆高度,以改变滑坡槽倾斜角度;通过伺服动作器4控制滑坡槽内第二滑轨16,以改变储料箱相对于滑坡槽的位置;通过伺服动作器5控制储料箱内的第三闸门与推料板。
64.本发明的一项具体实施中,往复式水泵应满足ng重力加速度下自身工作效率达到所需水循环速度的要求。箱体前板的可视窗由透光率≥85%的有机玻璃制成,能够抵抗超重力下的土体侧压力,并满足清晰度的要求。高速摄像机组件该组件应满足超重力下稳定、清晰的拍摄要求。水位传感器与流量传感器应能在超重力状态下保证监测精度,连接杆不出现过大变形导致监测系统误差加大。此外,模型箱箱体与内部结构之间应施作防水措施,所有的螺栓连接位置与板材接缝处亦应施作防水措施,具体的,所选用的防水措施应能满足模型箱变形和强度适应ng重力加速度以及隔断各个仓室的要求。
65.本发明地一项具体实施中,利用上述离心模型试验装置进行模拟滑坡诱发堰塞体堵江的过程包括:
66.准备阶段:根据试验条件调整储料箱位置、滑坡槽倾斜角度,在储料箱内加入相应的滑坡体材料和智能颗粒传感器,所述的智能颗粒传感器用于监测滑坡轨迹和受力情况;
67.将模型箱体安装在离心机吊篮上,在离心超重力环境下开展试验;
68.模拟试验阶段:
69.在进行河道水流模拟过程中,首先,调节缓冲池与水槽间的第一水闸至规定水位,控制水泵组件通过缓冲池向水槽供水,水槽内水流经过滤池中的水砂分离装置过滤净化后的水进入下方储水箱,实现水流循环,将后侧水闸降下至规定水位,待水位稳定后控制往复式水泵的供水流量,得到试验要求的河道水流速度;接着,打开储料箱闸门,启动推料板,将滑坡体材料释放,模拟滑坡运动过程;最后,滑坡体材料进入水槽中,形成堰塞体堵江,部分滑坡体材料被流水冲击后,通过过滤槽初步沉积滑坡体材料,再通过过滤装置进行过滤;在该模拟过程中,实时监测堰塞体几何形态、水槽内的水位、第一水闸和第二水闸处的水流流量、以及滑坡体材料的速度、受力和滑坡轨迹。
70.试验数据分析:
71.终止运转并拆机,分析试验数据,获得堵江时间和堰塞体几何形态变化特征。通过平行拍摄滑坡槽的运动相机数据,得到滑坡的速度位移特征。根据流量传感器分析得到流量开始减缓到完全停止的时刻,从而得到滑坡体堵塞水槽的时间,这一时间即为堵江时间。最后,提取不同时刻下监测水槽的运动相机的同一帧画面,得到不同时刻下水槽中的滑坡体材料的几何特征,对比不同时刻下这类材料的堆积高度、长度,获得堰塞体几何形态变化特征。
72.本发明采用伺服控制系统、边坡滑动模型和河道模型等构成滑坡动力条件模拟系统和离心超重力环境可以实现流量精确控制的水动力条件模拟系统,利用土工离心模型试验在ng超重力场的缩尺和缩时效应,采用流量精确控制装置模拟堰塞体堆积河道内的水力条件,利用可调节支撑杠与滑轨控制滑坡高度与滑坡的倾斜角,以此来控制滑坡速度,再现真实应力水平下滑坡堵塞河道形成堰塞坝的全过程。
73.以上所述仅为本发明的优选实施方式而已,并不用于限制本发明,对于本领域的技术人员来说,本发明可以有各种更改和变化。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1