一种用于激光跟踪仪靶点扫描的吸盘式行走机器人的制作方法
1.本发明属于大型风洞试验技术领域,具体涉及一种用于激光跟踪仪靶点扫描的吸盘式行走机器人。
背景技术:
2.激光跟踪仪作为位置形状高精度测量仪器已广泛应用到大型工程、高精密加工行业中,在大型风洞领域主要用于高精度曲面精度测量和重构使用,一般由操作者手持激光跟踪仪配套的采集靶球引导激光,将靶球沿型面曲线滑动完成数据采集。过程中需要操作者控制靶球与测量物体表面的贴合,要求操作者的行走速度均匀一致。由于是人工操作,数据扫描过程中容易出现局部位置靶球与被测物脱离、速度过快导致引导激光丢失、行走速度不一致导致采集数据疏密程度不一致等问题。随着风洞尺寸规模的扩大,达到2米以上量级时,人员无法达到3米以上的大跨度曲面进行靶球操作。
3.当前,亟需发展一种用于激光跟踪仪靶点扫描的吸盘式行走机器人。
技术实现要素:
4.本发明所要解决的技术问题是提供一种用于激光跟踪仪靶点扫描的吸盘式行走机器人。
5.本发明的用于激光跟踪仪靶点扫描的吸盘式行走机器人,其特点是,所述的机器人的车体为方形体,下部为方形的车架,上部为方形的车盖,车架和车盖对应的矩形侧壁的上下唇口采用凹凸镶嵌的卡槽扣合连接,车盖的上表面安装有摄像头;车架和车盖的中心安装一对上下对应的转盘轴承;上方的转盘轴承与智能电臂的一端连接,智能电臂的另一端固定靶球,靶球的扫掠端接触被测物体表面;智能电臂为六自由度扫描机械臂,根据被测物体表面形状调整靶球的扫掠端的接触角度和姿态,摄像头追踪靶球进行靶点扫描;车架的下表面左右两侧对称布置二组履带轮系,每组履带轮系包括1个驱动电机、2个驱动轮、若干个从动轮和一根履带,每组履带轮系的前后两端各安装1个驱动轮,中间安装若干个从动轮,驱动轮和从动轮的轴装卡在车架的下表面对应的侧壁轮安装孔内,履带张紧贴合在驱动轮和从动轮的表面,驱动电机的输出轴与前端的驱动轮的轴连接;通过左右两个驱动电机的同步驱动,控制左右二组履带轮系输出相同的速度实现机器人的前进和后退;通过左右两个驱动电机的差动驱动,控制左右二组履带轮系输出不同的速度实现机器人的转向和旋转;车架的下表面、二组履带轮系的中间位置,以下方的转盘轴承为中心,中心对称布置4个吸盘,每个吸盘连接一根软管,各软管均连接至车架内的真空泵上;通过真空泵抽吸,吸盘吸附在被测物体表面上,将机器人吸附在被测物体表面上;电池和控制模块固定在车盖内;电池通过电源线缆分别与驱动电机、真空泵、控制模块、智能电臂和摄像头连接,提供动力来源;控制模块通过信号线缆分别与驱动电机、真空泵、智能电臂、摄像头连接,进行程序和动作控制。
6.进一步地,所述的智能电臂为铝合金材质。
7.进一步地,所述的靶球为不锈钢光学镜面激光反射市售产品,通过智能电臂加持,替代人工手持,在程序控制下实现靶球的扫掠端沿被测物表面平面360
°
及不大于20mm竖直方向上的扫掠。
8.进一步地,所述的摄像头实时捕捉靶球及被测物周边的状态,由控制模块实时计算靶球的扫掠端的最佳姿态,并调整智能电臂使靶球的扫掠端始终贴合被测物表面,实现测试数据与实测型面的匹配。
9.进一步地,所述的吸盘通过真空泵的持续抽吸运行,在被测物金属表面和橡胶材质的吸盘之间形成低于10kpa的真空区域,利用真空区域的大气压力负压作用抵抗机器人设备重力,实现机器人在被测物表面悬置。
10.进一步地,所述的上方的转盘轴承通过螺钉固定在车盖内。
11.本发明的用于激光跟踪仪靶点扫描的吸盘式行走机器人的车架和车盖组合成完整车体;驱动电机、驱动轮、从动轮、履带,组成2组履带轮系,形成机器人行走能力;吸盘、软管、真空泵组成4组抽真空吸盘系统阵列布置在车架底部,形成接触面的吸附能力;智能电臂、靶球组成6自由度扫描端,通过转盘轴承安装在车架中心,扫描端穿过车盖顶部中心孔在车体外根据被测物体表面形状调整接触角度和姿态完成靶点扫描,形成扫描能力;电池、控制模块、摄像头通过螺钉固定在车盖内,形成控制及通信能力;电池通过电源线缆分别与驱动电机、真空泵、控制模块、智能电臂、摄像头连接提供动力来源;控制模块通过信号线缆分别与驱动电机、真空泵、智能电臂、摄像头连接实现程序和动作控制。
12.本发明的用于激光跟踪仪靶点扫描的吸盘式行走机器人的核心是利用真空泵系统持续抽走吸盘与被测物接触表面的空气,在局部形成真空压差,实现机器人吸附在被测物体表面,抵消机器人悬置顶壁或侧挂垂直壁时的重力,避免脱落;履带轮系提供机器人行走转向能力,推动扫描靶球沿程序既定路线运动;智能电臂夹持住靶球并根据型面的曲率变化通过电臂三个内置转动关节,调整靶球姿态,保持靶球与被测物始终接触,实现扫描功能。
13.本发明的用于激光跟踪仪靶点扫描的吸盘式行走机器人能够满足大型风洞复杂型面精度测量的需求,解决大空间高空手动操作实现困难的问题。
附图说明
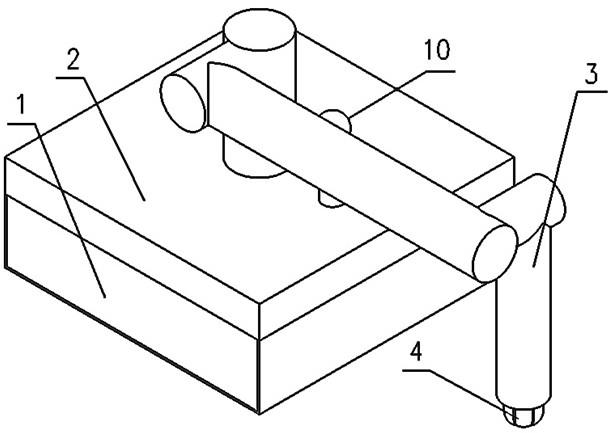
14.图1为本发明的用于激光跟踪仪靶点扫描的吸盘式行走机器人的立体图;图2为本发明的用于激光跟踪仪靶点扫描的吸盘式行走机器人的侧视图;图3为本发明的用于激光跟踪仪靶点扫描的吸盘式行走机器人的车架内部结构示意图;图4为本发明的用于激光跟踪仪靶点扫描的吸盘式行走机器人的车盖内部结构示意图。
15.图中,1.车架;2.车盖;3.智能电臂;4.靶球;5.履带轮系;6.驱动电机;7.吸盘;8.真空泵;9.控制模块;10.摄像头;11.电池;12.软管;13.电源线缆;14.信号线缆;15.驱动轮;16.从动轮;17.履带;18.螺钉;19.转盘轴承。
具体实施方式
16.下面结合附图和实施例详细说明本发明。
17.实施例1本实施例的用于激光跟踪仪靶点扫描的吸盘式行走机器人用于2米以上量级的大型风洞中。图1、图2为机器人外形图,展示外部可见组件,图3、图4为机器人内部组成。
18.本实施例的用于激光跟踪仪靶点扫描的吸盘式行走机器人包括车架1、车盖2、智能电臂3、靶球4、履带轮系5、驱动电机6、吸盘7、真空泵8、控制模块9、摄像头10、电池11、软管12、电源线缆13、信号线缆14、驱动轮15、从动轮16、履带17、螺钉18、转盘轴承19。
19.车架1和车盖2为中空方形壳体结构,中空部分分别安装其他组件,车架1和车盖2矩形侧壁上下唇口采用凹凸镶嵌的卡槽扣合组成完整车体;驱动轮15和从动轮16轴穿过车架1侧壁轮安装孔固定,履带17张紧贴合在驱动轮15和从动轮16轮表面,驱动电机6的电机轴与驱动轮15轴联接,组成2组履带轮系5,左右对称布置在车架1两侧,形成机器人行走能力;真空泵8通过软管12与4组吸盘7联接形成抽真空系统,吸盘7穿过车架1底部安装孔露出车架1底部与被测物体表面接触,形成真空区域;智能电臂3自带4个关节和1个电爪夹紧靶球4在控制模块9程序指令下实现扫描位置、高度的调整,智能电臂3通过分别安装在车架1中心和车盖2中心的一对转盘轴承19和螺钉18与车体连接并能够360
°
旋转运动;控制模块9、摄像头10、电池11固定在车盖2内腔卡套内,电池11通过电源线缆13分别与用电设备如智能电臂3、驱动电机6、真空泵8、控制模块9和摄像头10联接提供电源;控制模块9通过信号线缆14分别与智能电臂3、驱动电机6、真空泵8、摄像头10联接传输数据和程序指令。
20.本实施例的用于激光跟踪仪靶点扫描的吸盘式行走机器人,具备在风洞光滑曲面或平面壁沿指定路径自动行走并同时夹持靶球4进行型面形状精度数据采集的机器人,在大尺寸侧壁或者顶部可以通过吸盘7将机器人本身吸附在被测工件表面,通过履带轮系5匀速移动和转向,通过控制模块9程序控制智能电臂3夹持靶球4调整姿态适应被测物型面,实现无人值守数据采集,满足大型风洞复杂型面精度测量的需求,解决大空间高空人员无法抵达,手动操作实现困难的问题。
21.本实施例的用于激光跟踪仪靶点扫描的吸盘式行走机器人的主要部件:a.吸盘7和真空泵8组成的抽真空系统:在机器人行走过程中,抽走吸盘7与被测工件之间的空气,形成负压区域,抵消机器人悬挂在侧壁或者悬置顶部时的重力,实现机器人在被测物体表面的吸附和稳定;b.集成履带轮系5:履带轮系5共设置2个驱动轮15,可以分别控制左右履带轮系5的速度实现机器人的转向和旋转;c.控制模块9、智能电臂3、靶球4组成的扫描端:通过控制模块9发出指令控制智能电臂3随被测物型面变化实时调整靶球4的角度和位置,实现任意时刻扫描端始终与被测物体表面接触,实现数据采集连续。
22.尽管本发明的实施方案已公开如上,但其并不仅限于说明书和实施方式中所列运用,它完全可以被适用于各种适合本发明的领域。对于熟悉本领域的人员而言,在不脱离本发明原理的前提下,可容易地实现另外的改进和润饰,本发明并不限于特定的细节和这里示出与描述的图例。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1