从液柱内的对象收集光线的制作方法
从液柱内的对象收集光线
1.本技术是原案申请号为201980060330.0的发明专利申请(国际申请号:pct/us2019/049742,申请日:2019年9月5日,发明名称:从液柱内的对象收集光线)的分案申请。
技术领域
2.本发明涉及从液柱内的对象收集光线。
背景技术:
3.对象判别技术区分不同类型的对象。这些技术对于根据细胞类型对生物细胞进行分类特别有用。一些细胞分类方法依赖于从细胞发出的光来确定其类型。在一些实施方式中,在液柱中行进的细胞暴露于激发光,并且检测响应于激发光而从细胞发出的光。第一类型的细胞产生的输出光在例如波长和/或强度的一些特性方面与第二类型的细胞不同。从细胞发出的输出光的差异可以作为细胞类型判别和分类的基础。
技术实现要素:
4.一些实施方案涉及一种光学装置,所述光学装置被配置成接收从安置在液柱内的对象发出的输出光。输出光穿过对象与光学装置之间的液柱的光学折射边界。光学装置修改输出光,使得修改后的输出光的强度比输出光的强度更均匀。例如,在液柱的横截面内,修改后的输出光的强度可基本上均匀,而与对象的位置无关。
5.根据一些实施方案,一种光学设备包括光学装置并且还包括检测器,所述检测器检测修改后的输出光并且响应于修改后的输出光而提供电信号。
6.根据一些实施方案,一种判别系统包括激发光源,所述激发光源被配置成产生激发光并朝向液柱中的对象引导所述激发光。对象响应于激发光而发出输出光。所述系统包括被配置成接收输出光的光学装置。输出光穿过对象与光学装置之间的液柱的光学折射边界。光学装置修改输出光,使得修改后的输出光的强度比输出光的强度更均匀,例如,修改后的输出光的强度基本上均匀,而与对象在液柱横截面中的位置无关。光学检测器被配置成检测修改后的输出光并响应于修改后的输出光而提供电信号。对象类型判别电路基于电信号区分第一类型的对象与第二类型的对象。
附图说明
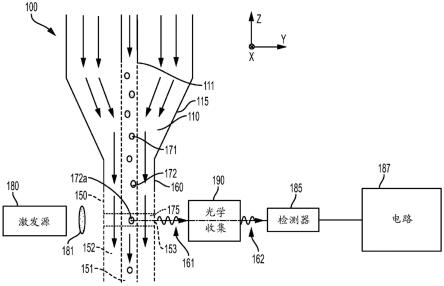
7.图1a是根据一些实施方案的并入有光学设备的系统的图;
8.图1b示出图1a的系统的测量区域中的液柱的xy平面横截面;
9.图2a示出从位于液柱的中心附近的对象发出的光,其中在液柱的流体-空气界面处基本上没有折射光。
10.图2b示出从位于液柱的椭圆形芯的上部部分中的对象发出的光,其在流体-空气界面处展现折射光;
11.图3示出作为位置x的函数的用于平面内光线密度的角相关性的解析公式的发展;
12.图4a提供一系列图表,示出了不同对象位置的辐射的角相关性;
13.图4b提供相对于沿着收集光学器件的不同数值孔径的x轴的对象位置从液柱收集的光的相对强度的一系列图。
14.图5a提供对于对象的不同位置的辐射的角相关性的一系列图并示出了排除区域;
15.图5b示出当没有排除角度时,当排除角度在-0.3rad与+0.3rad之间的光线时,以及当排除角度在-0.4rad与+0.4rad之间的光线时,从液柱收集的光相对于沿着x轴的对象位置的相对强度;
16.图6是根据一些实施方案的用于识别以所检测输出光的减少的位置变化在液柱中行进的对象的方法的流程图;
17.图7是根据一些实施方案的包括光学设备的光学系统的光线追踪模拟的顶视图;
18.图8是根据一些实施方案的被配置成减少液柱中的对象的所检测输出光的位置变化的分离式物镜的照片;
19.图9a和图9b示出图7的光学设备的模拟性能;
20.图10是根据一些实施方案的包括光学设备的光学系统的光线追踪模拟的顶视图;
21.图11示出根据一些实施方案的包括细长掩模特征的光学设备;
22.图12描绘根据一些实施方案的包括可与具有孔的板一起使用的细长掩模特征的光学设备;
23.图13示出根据一些实施方案的包括板和细长掩模特征的光学设备,其中板的光学透明度随位置而平滑地变化;
24.图14示出根据一些实施方案的包括板和细长掩模特征的光学设备,其中板的光学透明度随位置而变化;
25.图15是根据一些实施方案的光学设备的图,所述光学设备包括板和延伸穿过形成为整体结构的孔的细长掩模特征;
26.图16至图18示出根据几个实施方案的细长掩模特征的纵向边缘的各种配置;
27.图19是根据一些实施方案的包括导线掩模的光学设备的照片;以及
28.图20是根据一些实施方案的光学设备的照片,所述光学设备包括板,所述板具有延伸穿过形成为整体结构的孔的细长掩模特征。
29.附图未必按比例绘制。附图中使用的相同数字指代相同的组件。然而,将理解,在给定附图中使用数字来指代组件并非旨在限制另一附图中用相同数字标记的组件。
具体实施方式
30.本文描述的实施方案涉及用于区分不同类型的对象的装置、系统和方法。响应于指向液柱(例如,流动流)中的对象的激发光,对象发出输出光。在一些实施方式中,基于从对象发出的输出光的强度来区分细胞类型。本文讨论的具体实施方案涉及区分x染色体精子细胞与y染色体精子细胞。应当理解,本公开的方法可更一般地应用于区分不同类型的任何对象,只要当与从另一对象类型发出的光相比时,从一种对象类型发出的输出光在至少一个特性方面具有可辨别的差异。在所提供的一些示例中,液柱是具有弯曲边界或界面的流动流,在所述边界或界面可能发生光的折射。例如,液柱的弯曲边界的横截面通常可为圆形的。液柱可由实心壁限制或可喷射到空气中。对象可沿着液柱移动,液柱可包括由鞘液成
形的中心芯,所述鞘液至少部分地围绕中心芯。从对象发出的光在对象与其它材料之间,例如在液柱与空气之间的界面处,遇到至少一个光学折射边界。
31.至少部分地由于在流体-空气界面处的折射,在从柱内的对象发出的光的液柱外部的光收集效率取决于现有技术中系统的对象的位置。随着位置变化的光收集效率在必须精确量化从对象发出的光的应用中是不利的,并且这种精度受到对象的随机(不是直接可观察到的)位置波动的限制。本文公开的方法提高了可能受到这些波动限制的系统(例如,空中喷射流式细胞仪)的精度。如下面更详细地讨论,可通过选择性地掩蔽光学系统的一个或多个平面(例如,孔径光阑、场阑)上的光线来解决从液柱中的对象收集的光强度的位置变化性,以减小强度对位置的依赖性。
32.本文概述的方法特别适用于流式细胞仪。然而,这些方法可应用于在界面的一侧上从对象收集光的任何系统,所述对象从界面的另一侧发出光,其中界面以依赖于对象相对于检测器的位置的方式引起发出光线路径的变化。本文中的方法修改从对象发出的输出光的光收集效率,以补偿液柱内的位置变化。
33.图1a中示意性示出的“空中喷射”流式细胞仪系统100是可用于讨论本公开的概念的一种类型的流式细胞仪。“空中喷射”流式细胞仪系统100在高压下将流体泵送至腔室110中,从而使包括液柱的流动流150以例如大约20m/s的高速从腔室110的出口喷嘴160喷射出。从出口喷嘴160排出的液柱150的横截面可为大致圆形的,并且在一些实施方式中可具有约10μm至约100μm的直径。流动流150由在鞘流152内的芯流151组成,其中图1a中的箭头指示芯流151和鞘流152的流动方向。
34.在腔室110内,样本输出喷嘴111喷射包含可能是多种类型的对象171、172的芯流151。芯流151由鞘液流152界定和成形,所述鞘液流从鞘液喷嘴(未示出)喷射到腔室110中。鞘流152至少部分地围绕芯流151,并且鞘流152和芯流151基本上不混合。在流动流150从腔室110的出口喷嘴160喷射之前和之后,腔室110的倾斜或成角壁115使鞘流152将流动流150内的芯流151的截面尺寸变窄和/或保持所述横截面尺寸。当液柱150从腔室110喷射时,鞘流152的运动约束芯流151中的对象171、172朝向流动流150的中心移动。流动流150例如以单个文件的形式将对象171、172传递到流动流150的测量区域175。
35.当对象穿过流动流150的测量区域175时,来自激发光源180的光将激发光提供给对象171、172。激发光源180可提供宽波长带或窄波长带的光。例如,激发光源180可为激光器。在一些配置中,可通过光学元件181来修改激发光。例如,激发光可通过透镜181聚焦在测量区域175上。响应于激发光源180,测量区域175中的对象发出光,例如散射光或荧光。
36.与从第二类型的对象172发出的光相比,第一类型的对象171将发出在至少一个特性方面不同的光。例如,在一些情况下,第一类型的对象171发出的光的强度高于从第二类型的对象172发出的光的强度。
37.光学收集装置190被布置成收集从测量区域175内的对象发出的输出光161,所述输出光在流体-空气界面处与流动流150的光学折射边界相交。光学装置190被配置成修改输出光161以提供修改后的输出光162,所述修改后的输出光补偿从测量区域175中的对象172a发出的光的位置依赖性,如下面更详细地讨论。检测器185接收修改后的输出光162,并且作为响应,产生电信号。在一些情形下,对于不同的对象类型,电信号的振幅可能会有所不同。判别电路187使用电信号来区分不同类型的对象171、172。例如,判别电路187可被配
置成将电信号的振幅与阈值进行比较,以区分第一类型的对象171与第二类型的对象172。
38.图1b示出测量区域175中的流动流150的xy平面横截面。在测量区域175的xy横截面中,芯流151为椭圆形,并且芯流151的流体包括悬浮在缓冲溶液中的至少一个对象172a。鞘流152基本上围绕芯流151。在本公开中用于此讨论的特定示例中,对象171、172是精子细胞,并且系统100被实施为将x染色体精子与y染色体精子区分开。
39.由激发源180产生的聚焦激光束照射测量区域175内的精子细胞172a。细胞171、172被荧光染料染色,并且激发光使测量区域内的细胞172a发出荧光输出光。椭圆形芯151的目的是使精子细胞172a定向成使得精子细胞的平坦侧面向左侧和右侧,如图1b中所示。在此定向上,精子细胞172a的平坦侧分别面对激光器180和光学收集装置190。
40.当芯流151为椭圆形时,精子细胞172a可在芯流151内沿着x轴占据任意数量的位置。图1b示出椭圆形芯151中的精子细胞172a的三个可能位置。在图1b中所示的定向上,芯流151中的精子细胞172a的第一可能位置大约在椭圆形芯151的中心(在光学收集装置190的光轴199上),第二可能位置在芯流151的顶部(在光轴199上方),并且第三可能位置在芯流151的底部(在光轴199下方)。从精子细胞172a发出的输出光线的位置相关折射发生在芯流151内不同位置处的流体-空气界面153处。
41.当如图1b所示,精子细胞172a位于第一位置并且流动流150具有圆形横截面时,从精子细胞172a发出的面内光线近似垂直地入射在流体-空气界面153上。从精子细胞172a的远离其中心的点发出的光线,或从图形平面发出的光线,并不完全正常地入射在界面153上,在简化的讨论中没有考虑这些光线,但是本领域普通技术人员可看到如何将讨论概括为包括它们。因此,在流体-空气界面153处不发生光的折射。
42.图2a的图式示出当精子细胞172a在图1b中所示的椭圆形芯151内的第一位置时,不存在从精子细胞172a发出并且与界面153相交的输出光298的光折射。相应地,离开图2a中的流动流150的光线298的面内密度相对于射线角度是均匀的。光线的均匀角密度对应于作为射线角度函数的均匀辐射。
43.相反,当精子细胞172a离开光轴199并且更接近椭圆形芯151的顶部或底部,例如在图1b中所示的椭圆形芯151的第二位置和第三位置处时,从精子细胞172a发出的至少一些输出光线以倾斜角度遇到流体-空气界面153。与上面讨论的法向入射情况相反,这些输出光线在流体-空气界面153处折射。最倾斜的光线折射最严重。光线的折射导致穿过流体-空气界面153离开流动流150的荧光的辐射分布变得不均匀,并且随着细胞172a沿着x轴的位置而变化。也就是说,此折射改变了从流动流150之外的精子细胞172a发出的输出光的辐射分布。
44.例如,当细胞172a位于光轴199之外,例如位于图1b中所示的第二或第三位置处时,当与界面153的空气侧上分别以平行于光轴199的角度或负或正射线角度的辐射相比时,光线的密度以及因此在界面153的空气侧上的辐射在分别相对于光轴199的正或负射线角度下更高。正和负是指图3中的射线角度γ的符号。图2b是示出当细胞172a位于椭圆形芯151的第二位置时,从细胞172a发出并通过流体-空气界面153离开流动流150的光线299的图。在这种情况下,处于正射线角度的光线或辐射的密度大于平行于光轴199或处于负射线角度的光线的密度。对于具有预定数值孔径(na)的光学系统,所述系统从相同类型的细胞收集的光量(例如,收集效率)可能会根据细胞处于第一位置还是第二位置而变化。系统收
集效率的位置依赖性导致确定细胞类型时不准确。
45.参考图3,使用斯涅尔定律确定作为射线角度γ和精子位置x的函数的光线密度的解析公式,其中γ是在流体-空气界面处折射之后从对象发出的光线相对于光轴的角度。此分析仅考虑在流动流的二维横截面内或与其相切的射线。
46.我们希望求解相对于角度γ的光线密度,我们可用它来确定在每个精子位置x的光学收集系统的入射光瞳处的光线密度。这可写为:
47.i
γ
(γ)。
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(1)
48.为此目的,我们可以假设精子细胞在所有方向上均匀地发出光,因此相对于角度θ发出的光线的密度为:
49.i
θ
(θ)=1/π,
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(2)
50.即,从到均匀分布。通过几何分析:
[0051][0052]
以及(4)
[0053][0054]
其中角度γ、θ、φ、α、β和距离x在图3中示出。由于流动流具有折射率n,因此斯涅尔定律在角度之间产生了另一种关系:
[0055]
sinβ=nsin
∝
。
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(6)
[0056]
界面外部的光线密度i
β
(β)通过以下公式与界面内部的光线密度i
α
(α)相关,其中t(α)表示跨越两个偏振的通过界面的平均透射率:
[0057][0058]
透射率与s偏振rs(α)和p偏振r
p
(α)的菲涅耳反射系数有关,其公式如下:
[0059]
t(
∝
)=1-r(
∝
),
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(8)
[0060][0061]
和 (10)
[0062][0063]
使用方程式(7)与上述和以下附加关系:
[0064][0065]
和
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(13)
[0066][0067]
关于γ的射线密度的表达式为:
[0068][0069]
现在,通过最大射线角度γ0的正弦得出光学收集装置的na,因此我们可根据na来
求解此角度:
[0070]
γ0=sin-1
(na)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(16)
[0071]
最后,通过将方程式(15)从-γ0积分到γ0并通过x=0处的积分值进行归一化,得出作为精子位置x的函数的相对所收集光强度:
[0072][0073]
使用方程式(15)的射线密度分布的公式,可如图4a中绘制对于不同精子位置的射线密度(辐射)的角度依赖性。在图4a中,对于给定的精子位置x,每条线代表作为角度γ的函数的射线密度,其中角度γ以弧度表示。此图对应于位于关于x=0对称的范围内的一系列位置(对应于图4a中的曲线图404),在所述范围内射线密度(辐射)作为角度的函数是均匀的。当x为正时(例如,图1b中的第二位置,对应于曲线图402),对于正射线角γ,相对辐射较高,而对于负射线角γ,相对辐射较低,当x为负时(例如,在图1b中的第三位置时,对应于曲线图403),情况正好相反。
[0074]
如果收集光学器件(图1a和图1b中的光学收集装置190)的数值孔径较大,例如接近1,则所收集光强度相对于从椭圆芯内的对象发出的光的位置的变化相对较小。这是因为基本上从对象发出并指向右边的所有光都将由收集光学器件收集,而与确切的射线方向无关,并且发出的光的总量对于物体位置是不变的(给定均匀激发)。相反,较小的数值孔径导致相对于对象位置的相对较大的收集强度变化,这是因为对象位置的变化会影响辐射分布,而较小的数值孔径意味着仅收集此变化的辐射分布的一部分。实用系统可具有明显小于1(例如,小于0.5或小于0.3)的na。图4b中提供的曲线图族示出作为对象位置x的函数的通过具有不同na的收集光学器件从对象收集的光的相对强度。图4a示出由图4b的不同数值孔径捕获的角度γ的范围。
[0075]
在图4b的曲线图族中,曲线图412示出相对于沿着数值孔径(na)为0.2的收集光学器件(例如,图1a和图1b中所示的光学收集装置190)的x轴的位置的相对强度;曲线图414示出相对于沿着na为0.4的收集光学器件的x轴的位置的相对强度;曲线图416示出相对于沿着na为0.6的收集光学器件的x轴的位置的相对强度;曲线图418示出相对于沿着na为0.8的收集光学器件的x轴的位置的相对强度;以及曲线图419示出相对于沿着na为0.9的收集光学器件的x轴的位置的相对强度。从图4a和图4b清楚可见,与具有较大na的收集光学器件相比,具有较小na的收集光学器件相对于对象位置在所收集光强度方面产生较大变化。另外,与具有较小na的收集光学器件相比,具有较大na的收集光学器件收集具有更大折射角范围的光线,因此具有更高的总体收集效率。
[0076]
本文公开的各种实施方案涉及收集装置(例如,图1a和图1b中所示的装置190),所述收集装置减小了所收集光强度相对于流动流中的对象位置的变化。本文讨论的一些实施方案可提供修改后的输出光,对于对象沿着垂直于光轴的轴线远离流动流中心的位置偏差小于流动流半径的60%,修改后的输出光具有小于约3%,或小于约2%,或甚至小于约1%的测得强度变化。许多应用对可能由多种来源引起的强度测量误差敏感。由于难以通过精确地控制流动流内的对象的位置来减少强度波动,因此代替地通过仔细设计光学收集装置来减小所收集光强度相对于对象位置的变化是有用的。对于例如x/y精子分类的应用,通常基于两个群体之间测得的荧光强度差异来分离两个或多个细胞群体。如果随机位置波动导
致所收集光强度的波动幅度大于两个群体的荧光强度的标称差,则不可能同时以高产量和高纯度来区分它们。x和y精子细胞之间的荧光强度差通常只有百分之几(例如,对于牛精子为~4%)。从理论上讲,当前的精子分类器系统可通过增加芯流的流速来实现高通量,但这会增加芯流的宽度。因此,在流动流的芯内精子位置的不确定性会很大。这种位置不确定性以及所收集荧光强度的最终波动将当前精子分类器系统的最大通量限制在不会掩盖x和y精子之间的小荧光强度差异的水平。
[0077]
在精子分类器应用中,可用hoechst 33342(ho33342)对精子细胞染色,hoechst33342(ho33342)是一种细胞可渗透的染料,进入细胞核并选择性与活细胞精子头部内的双链dna的小沟中的a-t碱基对结合。通常,使用紫外线激光激发染色的精子细胞。当进行光学激发(在350nm或接近350nm)时,可通过测量每个细胞的总荧光之间的微小差异来分辨ho33342染色的y染色体承载(雄性)和x染色体承载(雌性)精子。总荧光的差异与精子细胞内的染色量成正比,而染色量与染色体含量成正比。哺乳动物物种之间的这种差异不同,但在家畜中,差异约为4%。
[0078]
一种用于强度-位置补偿的方法如图4a和图4b所示。图4a中的括弧范围突出显示对应于具有给定na的荧光收集光学器件的积分区域。在图4b中提供相对于图4a的na的对象位置的所收集强度变化的曲线图。在图4b中,对于给定na,在荧光收集区域上进行积分,使得可将所收集光的强度绘制为每个精子位置的函数。从图4b可知,增加收集光学器件的na有助于减少对象位置对通过收集光学器件收集的荧光强度的影响。
[0079]
本文所述的实施方案涉及收集光学器件(例如,图1a和图1b中的光学收集装置190),所述收集光学器件如上所述减小了相对于对象位置的所收集光强度变化。根据一些实施方案,收集光学器件通过掩蔽“角度空间”中的射线来操作,即,收集光学器件选择性地收集、衰减和/或阻挡来自不同角度γ的射线,以实现所需的强度与位置分布。实际上,可在光学系统的光瞳(例如,入射光瞳、出射光瞳或孔径光阑)处应用“角度空间”掩蔽功能,其中射线与光瞳平面相交的位置对应于角度γ。在一些实施方案中,收集光学装置通过优先于较小角度的光线收集较大角度(指向远离光轴的方向)的光线而获得所需的(例如较平坦的)强度与位置分布。
[0080]
图5a和图5b示出了在给定na处排除低角度折射射线如何使强度-位置曲线变平坦。排除低角度射线会排除在强度与位置分布中产生最大变化的射线,而在高正角度时辐射的角度变化往往会抵消在高负角度时的对应变化。图5a示出了沿着x轴的不同对象位置的相对辐射与射线角度γ的曲线图,其中角度γ以弧度表示。在图5a中,每个曲线图对应于在流动流的芯内的对象位置x,如图3中所指示。图5a中的括弧范围示出了当排除角度大小小于0.3rad的射线时(图5a中的下括弧范围)并且当排除角度大小小于0.4rad的射线时(图5a中的上括弧范围),将由收集光学器件针对每个位置x排除的光线的部分。
[0081]
图5b示出了当没有排除角度时(曲线图500),当排除角度在-0.3rad与+0.3rad之间的射线(曲线图503)时,以及当排除角度在-0.4rad与+0.4rad之间的射线时(曲线图504),相对的所收集光强度相与对象沿着x轴的位置。曲线图5b示出当排除较低角度射线时,相对强度与位置曲线图相对于位置表现出较小的强度变化。
[0082]
在图6的流程图中示出了用于识别在存在位置变化时在液柱中行进的对象的方法。所述过程包括修改620从穿过流动流的横截面的对象发出的输出光,使得修改后的输出
光的强度比未修改的输出光的强度更均匀。在一些实施方案中,不管对象的位置如何,修改后的输出光是基本均匀的。检测到630修改后的输出光,并且响应于检测到的修改后的输出光而生成640电信号。处理器或其它电路可使用电信号来区分650不同类型的对象。例如,电路可将电信号的振幅(对应于检测到的光的强度)与阈值进行比较,以区分第一类型的对象与第二类型的对象。可选地,在一些实施方式中,激发光可由激发源产生610并且指向流动流的横截面,其中对象响应于激发光而发出输出光。
[0083]
图7是根据一些实施方案的包括光学设备710的光学系统700的光线追踪模拟的顶视图。设备710有效地扩展了收集光学器件在液柱的横截面平面内的na,从而优先于较小角度射线收集在位置与强度方面更平衡的较大角度射线,所述较低角度射线倾向于将变化注入位置与强度分布,如在图5a和图5b的论述中解释。光学收集装置710修改从流动流的横截面中的对象发出的光,使得修改后的输出光的强度比从对象发出的输出光的强度更均匀。不管对象在横截面内的位置如何,修改后的输出光都可为基本均匀的。在此特定实施方案中,修改后的输出光的强度基本均匀,而与对象沿着垂直于收集装置的光轴的轴线的位置无关。其它实施方案可使修改后的输出光的强度基本均匀,而与对象沿着另一轴线(例如,收集装置的光轴)的位置无关。
[0084]
光学收集装置710优先于以相对于光轴799的较小角度从对象发出的光线收集以相对于光学装置的光轴799的较大角度从对象发出的光线。在一些实施方式中,光学收集装置710是分离式物镜。分离式物镜710的第一区段711收集从对象(图7中未示出的对象)发出的较大角度的光的第一部分751。分离式物镜710的第二区段712收集从对象发出的较大角度的光的第二部分752。如图7中所示,在一些实施方案中,进一步防止收集较小角度射线的掩模可安置在阻挡较小角度射线的任何地方,例如,在光被准直的孔径光阑或光瞳平面附近。例如,如图7所示,掩模786可安置在两个透镜711、712之间。
[0085]
如图7中所指示,系统700可被实施为折叠光学系统,所述折叠光学系统使用反射镜721、722、723、724来沿着系统700的光轴799并且朝向检测器785重定向所收集的光的部分。反射镜721、722将光的第一部分751朝向并沿着光轴重定向,并且反射镜723、724将光的第二部分752朝向并沿着光轴799重定向。如图7中所示,系统700可任选地包括滤波器730,例如光学带通或长通滤波器,所述滤波器被配置成基本上衰减激发光。系统700可包括透镜740,所述透镜被配置成将光的第一部分751和第二部分752朝向检测器785聚焦。
[0086]
图8是被配置成减小强度相对于对象位置的变化的分离式物镜的照片。应注意,由于由喷嘴产生流动流所引起的空间阻碍,分离式物镜设计允许将荧光收集光学器件放置在比原本更靠近流动流的位置。具有与分离式物镜相同的有效na的单个透镜太大,以至于无法将其焦点直接放在产生流动流的喷嘴下方。在流动流离开喷嘴(此处流最稳定)之后,立即最佳地执行流动流内的对象的光学检测,因此重要的是具有不干扰喷嘴的高na光学器件。
[0087]
图9a示出了基于图7中的模型的分离式物镜的模拟性能与在不使用空间掩模1010的情况下图10中所示的对比装置的模拟性能。曲线图901提供相对于包括上面所讨论分离式物镜的系统的对象位置的强度。曲线图902是比较布置的强度与位置并在图9a中提供用于进行比较。应注意,除了位置变化对所收集光强度的影响减小之外,分离式物镜布置的总体收集效率也更高。
[0088]
为了更清楚地示出此比较,在图9b中,将每个曲线图901a、902a归一化到100%。曲线图901a提供了相对于分离式物镜布置的中心位置的收集效率。曲线902a示出了对于仅具有单个物镜的比较系统,相对于中心位置的收集效率。分离式物镜在20μm的对象位置与中心收集效率的偏差小于1%,而比较布置在相同对象位置处与中心收集效率的偏差大于10%。
[0089]
还可使用其它方法来减小位置与强度分布的变化,所有这些都被认为是本公开的新颖方面。例如,除了通过分离式物镜例示的在角度空间(例如,靠近光学系统的光瞳)中选择射线的收集装置,可在图像或位置空间中(例如,靠近光学系统的图像平面)选择射线。在位置空间中选择射线的光学收集装置的一个示例是光学系统的图像平面附近的空间掩模。为了使这样的掩模更容易地对准并且更稳固地对准,这有助于增加光学系统的放大倍率,从而允许使用更大的掩模特征尺寸。
[0090]
图10是光学系统1000的射线追踪模拟的顶视图,所述光学系统包括光学收集装置1010,例如空间掩模,所述光学收集装置衰减从流动流横截面的中心附近的对象发出的光线,而不衰减从流动流横截面的顶部和底部处的对象发出的光线。如本文所使用的术语“衰减”涵盖部分地阻挡或完全地阻挡光线。例如,与光线的原始强度相比,衰减光线的强度降低了25%或50%或75%甚至100%,其中25%、50%和75%衰减对应于部分被阻挡的光线,而100%衰减对应于完全被阻挡的光线。图10中所示的系统1000包括单个物镜1070,所述物镜使从对象(图10中未示出的对象)发出的光准直。系统1000任选地包括滤波器1030,例如带通滤波器或长通滤波器,所述滤波器被配置成阻止激发光到达检测器1085。透镜1040可用于朝向检测器1085的敏感区域1086聚焦收集的光。空间掩模1010衰减从流动流横截面1050的中心发出的光线或阻止所述光线到达检测器1085,而不会衰减从流动流横截面1050的顶部区域1051和底部区域1052发出的光线或阻止所述光线到达检测器1085。在图10中,流动流横截面1050的顶部区域1051是指流动流横截面的在图10中的光轴1099上方的部分。流动流横截面1050的底部区域1052在图10中的光轴1099下方。掩模1010对于发出的光可为不透明的,或者可为半透明的。在一些实施方案中,掩模1010的光学透明性可随位置而变化,例如,使得流动流横截面的中心的图像比流动流横截面的顶部/或底部的图像衰减更多。
[0091]
减轻所收集强度随对象位置的变化的简单空间掩模是光学检测器1085前的细线(例如,直径在大约100微米到300微米范围内,例如直径大约200微米)并靠近流动流的图像,其中线轴平行于流动流定向并且相对于光轴1099名义上居中。可通过将导线移入和移出图像平面1087来改变导线的作用,流动流的图像(当前实施方案中的放大图)出现在所述图像平面。
[0092]
在图11中示出了减小所收集强度随对象位置的变化的空间掩模。空间掩模包括细长特征1110,所述细长特征可被实施为具有圆形横截面面积的细线,具有矩形横截面面积的条或至少部分地跨过光学检测器的有源区域1185并靠近流动流的图像安置的其它掩模特征。可以通过多种方式实施细长的掩模特征1110,包括挤出的金属丝、蚀刻的金属特征、人或动物的头发,沉积在载玻片上的迹线,或印刷在透明介质上的墨水线。
[0093]
通常,掩模特征的长度l远大于其宽度w。掩模特征1110可定向成使得掩模特征1110的长度平行于流动流,并且掩模特征1110相对于系统的光轴(参见图10)在名义上居
中。在一些实施方案中,掩模特征1110可具有约100微米至约300微米,例如约200微米的宽度。
[0094]
如图12中所示,细长掩模特征1210可与具有孔1222的板1220结合使用,其中如图12所示,细长掩模特征1210至少部分地跨过孔1222安置。板1220可特别适用于对准系统光学器件,以在强度略有不同的两种类型的对象之间实现最佳强度差。
[0095]
在一些实施方案中,板可由部分阻止(阻止大于25%且小于75%的光)、基本上阻止(阻止大于75%的光)或完全阻止(阻止100%的光)从被测对象发出的光到达检测器的活动区域1230的材料制成。板1220中的孔1222将从对象发出的基本上所有光透射到检测器的活动区域1230。板1220和孔1222促进系统光学器件的对准,从而允许操作员对准掩模特征1210,使得在从第一类型的对象发出的较低光强度与从第二类型的对象发出的略高光强度之间实现最佳对比度。
[0096]
图13示出了另一实施方案,其中板的光学透明度在其长度和宽度上变化。在此示例中,越接近孔1322,板1320就更光学透明,并且越远离孔,板的透射性就越低。然而,相反的情况也是可能的,其中板在孔附近的透射率较低,而远离孔的透射率较高。
[0097]
图14示出了具有逐步光学透明度梯度的板1420的另一版本。在区域1421a、1421b、1421c、1421d中的不同步骤中,越接近孔1422,板1420就变得更透光。将图13的板1320与图14的板1420相比较,板1320的光学透明度从板1320的外边缘的较低光学透明度逐渐过渡到板1320的中心处的孔1322附近的较高光学透明度。
[0098]
在一些实施方案中,孔板和延伸穿过孔的细长掩模特征形成为如图15中所示的整体结构。图15示出了板1520,所述板包括将孔1522一分为二的细长特征1510。在一些实施方案中,整体式孔板1520可具有如先前参考图13和图14所讨论和图示的光学透明度梯度。如图15中所示的整体式孔板例如通过对金属板进行光刻来形成。
[0099]
细长掩模特征1510的纵向边缘1510a、1510b不需要如图15中所示平行。在一些实施方案中,可通过具有如图16和图17所示的具有不平行纵向边缘1610a、1610b、1710a、1710b的细长掩模特征1610、1710来增强对准过程。在一些实施方案中,细长掩模特征1810的纵向边缘1810a、1810b可如图18中所示弯曲。
[0100]
图19是示出根据一些实施方案的包括具有孔1922的板1920的光学装置的照片。包括细线的细长掩模特征1910跨过孔1922定位在光电倍增管检测器的入口前面。如先前所讨论,导线通过优先地衰减从流动流横截面的中心处的对象发出的光来修改从流动流中的对象发出的输出光。与未修改的输出光相比,光的优先衰减提供了更均匀的光强度与对象位置分布。
[0101]
图20是示出根据一些实施方案的光学装置的照片,所述光学装置包括板2020和延伸穿过形成为一个整体结构的孔2022的细长掩模特征2010。例如,板和细长掩模特征2010可通过对(分割的)孔2022进行光刻来形成。
[0102]
已出于说明和描述的目的且飞限制性地呈现各种实施方案的前面描述。所公开的实施方案不旨在是穷举的或将可能的实施方式限制于所公开的实施方案。许多修改和变化鉴于以上教示是可能的。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1