形状检查装置和高度图像处理装置的制作方法
1.本发明涉及通过三角测量方法检测测量对象的位移的技术,并且具体地涉及用于基于所生成的轮廓数据来检查测量对象的形状的形状检查装置、处理装置、高度图像处理方法和高度图像处理程序。
背景技术:
2.作为对测量对象的轮廓进行测量的装置,光切割型的光学位移计是已知的。在光学切割方法的典型光学位移计中,用光照射移动的测量对象,并且可以基于指示从测量对象的表面反射的反射光的光接收量的光接收信号来生成表示测量对象的三维形状的轮廓数据。可以通过在测量对象的移动方向上布置所生成的多个轮廓数据来获得测量对象的高度图像。
3.例如,当通过光学位移计测量在水平方向上移动的测量对象的轮廓时,测量对象可能在高度方向或横向方向(宽度方向)上振动。当测量对象在测量期间在高度方向上振动时,将高度方向上的振动成分添加到测量对象的轮廓数据。此外,当测量对象在测量期间在横向方向上振动时,将横向方向上的振动成分添加到测量对象的轮廓数据。在一些情况下,由于振动成分的添加,高度图像不能准确地反映测量对象的形状。
4.因此,例如,如jp 2017-151066 a和jp 2006-189315 a中所公开的,通过利用图像处理估计并去除振动成分来抑制振动成分的影响的检查方法是已知的。
5.在jp 2017-151066 a和jp 2006-189315 a中所描述的光学位移计中,通过图像处理来估计振动成分。由于通过图像处理估计振动成分的前提要基于测量对象的高度方向上的位移的周期性来进行,因此尽管可以估计高度方向上的振动成分,但是难以估计横向方向上的振动成分。另外,所估计的高度方向上的振动成分是基于高度方向上的位移的周期性的,因此,存在如下的可能性:包括在高度图像中的测量对象的形状的一部分也被错误地估计为振动成分。
6.因此,在jp 2017-151066 a和jp 2006-189315 a中所描述的光学位移计中,在一些情况下,当测量对象移动时,难以生成准确地反映测量对象的形状的高度图像。
技术实现要素:
7.本发明的目的是提供如下的形状检查装置、处理装置、高度图像处理方法和高度图像处理程序:即使在相对于测量对象的轮廓数据发生高度方向上的振动和横向方向上的振动的情况下,也能够生成准确地反映测量对象的形状的高度图像。
8.为了实现上述目的,根据本发明的一个实施例,一种光学切割方法的形状检查装置包括:光投射单元,用于利用在x轴方向上扩散的狭缝光或在x轴方向上扫描的点状光来照射在与x轴相交的y轴方向上相对移动的测量对象;光接收单元,用于接收来自x轴方向上的各个位置的反射光,并且输出指示光接收量的光接收信号;轮廓数据生成单元,用于基于光接收信号来生成测量对象在与y轴方向相交的平面中的轮廓数据;高度图像生成单元,用
于获取在测量对象在y轴方向上相对移动时由轮廓数据生成单元顺次生成的轮廓数据,并且生成测量对象的高度图像;显示控制单元,用于使显示单元显示由高度图像生成单元生成的高度图像;设置单元,用于在显示单元上所显示的高度图像上接收校正基准区域的设置,所述校正基准区域用于校正轮廓数据生成单元所生成的轮廓数据;以及检查单元,用于基于由轮廓数据生成单元生成的轮廓数据来检查测量对象的形状。
9.这里,高度图像生成单元还可以分别针对由轮廓数据生成单元生成的轮廓数据,提取包括在校正基准区域中的特征点,并且通过基于所提取的特征点的位置在与对应于y轴的方向相交的平面中移动各个轮廓数据来校正高度图像。
10.根据该配置,在设置形状检查装置时,在设置单元中将在与y轴相对应的方向上延伸的二维区域设置为校正基准区域。此后,高度图像生成单元针对在形状检查装置的操作期间由轮廓数据生成单元分别获得的轮廓数据,提取包括在校正基准区域中的特征点。然后,高度图像生成单元针对各个轮廓数据计算x轴方向或作为高度方向的z轴方向上的偏移量(移动量),该偏移量是将所提取的特征点在与y轴相对应的方向上对准成一行所需的。所计算出的偏移量是表示相对于轮廓数据的各个理想存在位置的位移量的量。然后,高度图像生成单元根据所计算出的偏移量在与y轴相交的平面(由x轴方向和z轴方向限定的平面)中使各个轮廓数据偏移(移动)。也就是说,基于偏移量(其是轮廓数据的理想存在位置和实际存在位置之间的差)来使各个轮廓数据偏移,从而校正相对于理想存在位置的位移。然后,高度图像生成单元在与y轴相对应的方向上布置去除了相对于理想存在位置的位移的轮廓数据,以生成准确地反映测量对象的形状的检查用高度图像。
11.以这种方式,高度图像生成单元针对各个轮廓数据计算移动量以减小轮廓数据之间的位移,并且基于所计算出的移动量(偏移量)来使各个轮廓数据偏移。因此,在不改变轮廓数据的形状、并且与测量对象上发生的振动的周期性无关地的情况下,可以生成在通过对测量对象进行测量所获得的轮廓数据中生成的振动成分已经减小的高度图像。
12.根据本发明的另一实施例,高度图像生成单元可以基于从轮廓数据提取的多个特征点的高度来计算基准高度。也就是说,基于从位置在与y轴相对应的方向上不同的多个轮廓数据所提取的特征点的高度,计算用作轮廓数据的对准基准的基准高度。
13.根据该配置,高度图像生成单元校正轮廓数据,以减少在通过对测量对象进行测量所获得的轮廓数据中生成的高度方向(z轴方向)上的振动成分。也就是说,各个轮廓数据可以在z轴方向上偏移,使得轮廓数据的特征点存在于理想存在位置,并且可以生成准确地反映测量对象的形状的检查用高度图像。
14.根据本发明的又一实施例,高度图像生成单元可以基于从轮廓数据提取的多个特征点的x位置来计算基准x位置。也就是说,可以基于从位置在与y轴相对应的方向上不同的多个轮廓数据提取的特征点的x位置,来计算用作轮廓数据的对准基准的基准x位置。
15.根据该配置,高度图像生成单元可以去除在通过对测量对象进行测量所获得的轮廓数据中生成的横向方向(x轴方向)上的振动成分。也就是说,各个轮廓数据可以在x轴方向上偏移,使得轮廓数据的特征点存在于理想存在位置,并且可以生成准确地反映测量对象的形状的检查用高度图像。
16.根据本发明的又一实施例,设置单元接收固定坐标系中的x校正基准区域和以测量对象作为基准的相对坐标系中的z校正基准区域的设置作为校正基准区域。然后,高度图
像生成单元针对各个轮廓数据从x校正基准区域提取x轴方向上的特征点。另外,高度图像生成单元基于从x校正基准区域计算出的多个特征点的x位置来计算基准x位置。然后,高度图像生成单元根据从x校正基准区域计算出的特征点的x位置与基准x位置之间的差,使各个轮廓数据在x轴方向上偏移。也就是说,使轮廓数据偏移,使得在与y轴相对应的方向上具有不同位置的多个轮廓数据之间校正x方向上的位移。此后,高度图像生成单元在与y轴相对应的方向上布置经偏移的轮廓数据,以生成去除了x方向上的位移的x校正高度图像。
17.接下来,高度图像生成单元基于包括在x校正高度图像中的测量对象的位置来设置z校正基准区域。也就是说,z校正基准区域没有相对于x校正高度图像设置在固定坐标系中,而是设置在以测量对象作为基准的相对坐标系中。然后,高度图像生成单元针对各个轮廓数据从z校正基准区域提取z轴方向上的特征点。此外,高度图像生成单元基于从z校正基准区域计算出的多个特征点的高度来计算基准高度。然后,高度图像生成单元根据从z校正基准区域计算出的特征点的高度与基准高度之间的差,在z轴方向上偏移各个轮廓数据。也就是说,使轮廓数据偏移,使得在与y轴相对应的方向上具有不同位置的多个轮廓数据之间去除z方向上的位移。此后,高度图像生成单元在与y轴相对应的方向上布置经偏移的轮廓数据,以生成x轴方向和z轴方向上的位移被减小的检查用高度图像。
18.根据该配置,即使当设置有多个校正基准区域时,高度图像生成单元也可以更准确地校正在通过对测量对象进行测量所获得的轮廓数据中生成的振动成分。也就是说,可以在无需准确地确定要对测量对象进行测量的位置的情况下,根据测量对象的测量位置来设置适当的校正基准区域,并且可以更准确地校正在轮廓数据中生成的振动成分。
19.根据本发明的又一实施例,设置单元接收固定坐标系中的z校正基准区域和以测量对象的高度作为基准的相对坐标系中的x校正基准区域的设置作为校正基准区域。然后,高度图像生成单元针对各个轮廓数据从z校正基准区域提取z轴方向上的特征点。另外,高度图像生成单元基于从z校正基准区域计算出的多个特征点的高度来计算基准高度。然后,高度图像生成单元根据从z校正基准区域计算出的特征点的高度与基准高度之间的差,使各个轮廓数据在z轴方向上偏移。也就是说,使轮廓数据偏移,使得在与y轴相对应的方向上具有不同位置的多个轮廓数据之间减小z方向上的位移。此后,高度图像生成单元通过在与y轴相对应的方向上布置经偏移的轮廓数据,来生成去除了z方向上的位移的z校正高度图像。
20.接下来,高度图像生成单元基于基准高度来设置x校正基准区域。也就是说,x校正基准区域不是相对于z校正高度图像设置在固定坐标系中,而是设置在以基准高度作为基准的相对坐标系中。然后,高度图像生成单元针对各个轮廓数据从x校正基准区域提取x轴方向上的特征点。另外,高度图像生成单元基于从x校正基准区域计算出的多个特征点的x位置来计算基准x位置。然后,高度图像生成单元根据从x校正基准区域计算出的特征点的x位置与基准x位置之间的差,使各个轮廓数据在x轴方向上偏移。也就是说,使轮廓数据偏移,使得在与y轴相对应的方向上具有不同位置的多个轮廓数据之间减小x方向上的位移。此后,高度图像生成单元在与y轴相对应的方向上布置经偏移的轮廓数据,以生成去除了z方向和x轴方向上的位移的检查用高度图像。
21.根据该配置,即使当设置有多个校正基准区域时,高度图像生成单元也可以更准确地校正在通过对测量对象进行测量所获得的轮廓数据中发生的振动。也就是说,可以在
无需准确地确定要对测量对象进行测量的位置的情况下,根据测量对象的测量位置来设置适当的校正基准区域,并且可以更准确地校正在轮廓数据中生成的振动成分。
22.注意,本发明还可以实现为在光学切割位移计中使用的高度图像处理方法和高度图像处理程序。另外,本发明还包括存储有高度图像处理程序的计算机可读存储介质。
23.如上所述,即使在相对于测量对象发生高度方向上的振动或横向方向上的振动的情况下,也可以生成准确地反映测量对象的形状的高度图像。
24.根据本发明的一方面,一种形状检查装置,包括:光投射部,用于利用在x轴的方向上扩散的狭缝光或在x轴方向上扫描的点状光照射在与所述x轴相交的y轴的方向上相对移动的测量对象;光接收部,用于接收来自所述x轴方向上的各个位置的反射光,并且输出指示光接收量的光接收信号;轮廓数据生成单元,用于基于所述光接收信号来生成所述测量对象在与y轴方向相交的平面中的轮廓数据;检查单元,用于基于所述轮廓数据生成单元所生成的轮廓数据来检查所述测量对象的形状;高度图像生成单元,用于顺次获取在所述y轴方向上相对移动的所述测量对象的轮廓数据,并且基于顺次获取的多个轮廓数据来生成所述测量对象的高度图像;显示控制部,用于使显示部显示所述高度图像生成单元所生成的高度图像;以及设置单元,用于在所述显示部上所显示的所述高度图像上接收用于校正所述轮廓数据生成单元所生成的各个轮廓数据的校正基准区域的设置,其中,所述高度图像生成单元还进行如下操作:针对所述轮廓数据生成单元所生成的各个轮廓数据,提取包括在所述校正基准区域中的特征点,以及通过基于所提取的多个特征点的位置使各个轮廓数据在与对应于所述y轴的方向相交的平面中移动,来校正所述高度图像。
25.根据本发明的另一方面,一种形状检查装置,包括:光投射部,用于利用在x轴的方向上扩散的狭缝光或在x轴方向上扫描的点状光照射在与所述x轴相交的y轴的方向上相对移动的测量对象;光接收部,用于接收来自所述x轴方向上的各个位置的反射光,并且输出指示光接收量的光接收信号;轮廓数据生成单元,用于基于所述光接收信号来生成所述测量对象在与y轴方向相交的平面中的轮廓数据;检查单元,用于基于所述轮廓数据生成单元所生成的轮廓数据来检查所述测量对象的形状;高度图像生成单元,用于顺次获取在所述y轴方向上相对移动的所述测量对象的轮廓数据,并且基于顺次获取的多个轮廓数据来生成所述测量对象的高度图像;显示控制部,用于使显示部显示所述高度图像生成单元所生成的设置用高度图像;以及设置单元,用于在所述显示部上所显示的所述设置用高度图像上接收在与所述y轴相对应的方向上延伸的二维区域的设置作为校正基准区域,其中,所述高度图像生成单元还进行如下操作:针对所述轮廓数据生成单元所生成的各个轮廓数据,识别所述校正基准区域中所包括的轮廓数据,并且计算该轮廓数据的倾斜值,以及基于所计算出的倾斜值和预定校正基准角度之间的差,通过在与对应于所述y轴的方向相交的平面中在旋转方向上移动各个轮廓数据,来校正所述高度图像。
26.根据本发明的又一方面,一种高度图像处理装置,用于利用在x轴的方向上扩散的狭缝光或在x轴方向上扫描的点状光照射在与所述x轴相交的y轴的方向上相对移动的测量对象,基于指示来自所述x轴方向上的各个位置的反射光的光接收量的光接收信号来生成所述测量对象在与y轴方向相交的平面中的轮廓数据,并且基于所生成的轮廓数据来生成所述测量对象的高度图像,所述高度图像处理装置包括处理器,所述处理器与存储器进行通信,所述处理器被配置为执行存储在所述存储器中的指令,所述指令使所述处理器进行
如下操作:顺次获取在所述y轴方向上相对移动的所述测量对象的轮廓数据;针对所获取的各个轮廓数据,计算用于校正轮廓数据之间的位移的移动量;基于所计算出的移动量,在与所述y轴相交的平面中移动各个轮廓数据;以及在与所述y轴方向相对应的方向上布置经移动的轮廓数据,以生成检查用高度图像。
附图说明
27.图1是示出根据本发明的第一实施例的形状检查装置的结构的框图;
28.图2是摄像头部和测量对象的外部斜视图;
29.图3是示出测量对象的表面上的光照射位置与光接收单元上的光入射位置之间的关系的图;
30.图4是示出光接收单元的光接收面上的光接收量分布的图;
31.图5a至5c是示出x2方向上的像素阵列中的光接收量分布的图;
32.图6是示出所检测到的峰位置和峰亮度值的图;
33.图7a和7b是示出三维数据和亮度图像数据的图;
34.图8是示出图1中的处理装置的结构的框图;
35.图9是测量对象的理想高度图像;
36.图10a和10b是在施加非周期性振动的情况下的高度图像;
37.图11a和11b是示出轮廓数据的校正的图;
38.图12a和12b是示出轮廓数据的校正的图;
39.图13a和13b是示出用户界面的图;
40.图14a至14c是示出由控制单元进行的处理的流程图;
41.图15a和15b是示出用户界面的图;
42.图16是示出由控制单元进行的处理的流程图;
43.图17是示出校正参数的图;
44.图18a至18c是示出所设置的校正基准区域的图;
45.图19是示出用户界面的图;
46.图20a和20b是示出由控制单元进行的处理的流程图;
47.图21a和21b是示出倾斜校正的图;
48.图22a和22b是示出用户界面的图;
49.图23a和23b是示出由控制单元进行的处理的流程图;
50.图24a和24b是示出由控制单元进行的处理的流程图;
51.图25a和25b是示出由控制单元进行的处理的流程图;
52.图26是示出倾斜校正的图;
53.图27a和27b是示出基准面估计的图;
54.图28是示出设置有多个校正基准区域的情况的图;以及
55.图29是示出根据本发明的第二实施例的处理装置的结构的框图。
具体实施方式
56.在下文中,将参考附图详细描述本方面的实施例。注意,优选实施例的以下描述本
质上仅仅是示例,并且不旨在限制本方面、其应用或其用途。
57.[1]第一实施例
[0058]
(1)形状检查装置的结构
[0059]
在下文中,将参考附图描述根据本发明的实施例的形状检查装置、处理装置、高度图像处理方法和高度图像处理程序。图1是示出根据本发明的第一实施例的形状检查装置500的结构的框图。形状检查装置500用于例如测量由带式输送部等以恒定速度移动的测量对象s的三维形状,并检查所测量的测量对象s的三维形状。在图1中,测量对象s的移动方向a由白色箭头指示。测量对象s的移动方向a也可以被称为输送方向。
[0060]
如图1所示,形状检查装置500包括摄像头部100、处理装置(处理器)200、输入单元300和显示单元400。摄像头部100包括光投射单元(光投射部)110和摄像单元120。光投射单元110和摄像单元120构成光切割型的光学位移计。该光学位移计可以包括处理装置200。然后,摄像单元120包括光接收单元(光接收部)121和光接收透镜122。此外,处理装置200包括存储单元210和控制单元(控制部)220。
[0061]
图2是摄像头部100和测量对象s的外部斜视图。如图2所示,各个摄像头部100被安装成使得y1方向基本上与测量对象s的移动方向a平行。尽管未示出,但摄像头部100附接到例如固定基座、支撑件或支架等,并且以固定状态使用。在包括移动方向a的平面中与y1方向正交的方向是x1方向。与x1方向和y1方向正交的方向是z1方向。x1方向、y1方向和z1方向分别是x轴方向、y轴方向和z轴方向的示例。
[0062]
光投射单元110包括光源,并且被配置为能够在z1方向上发射如图2所示的在x1方向上扩散的线状光或在x1方向上扫描的点状光。光源可以被配置为例如激光二极管(ld),但是实施例不限于此。光源可以是例如发光二极管(led)或超发光二极管(sld)。线状光和点状光也可以被称为测量光。
[0063]
图3是示出测量对象s的表面上的光照射位置与光接收单元121上的光入射位置之间的关系的图。如图3所示,已从光投射单元110投射并在测量对象s的x1方向上的各个位置处反射的光通过光接收透镜122入射在光接收单元121上。光接收单元121包括例如互补金属氧化物半导体(cmos)传感器或电荷耦合器件(ccd)传感器,并且具有以二维方式设置有多个像素的光接收面。在光接收单元121的光接收面上彼此正交的两个方向被称为作为x轴方向的x2方向和作为z轴方向的z2方向。另外,与x2方向和z2方向正交的方向被称为y2方向。y2方向是与y轴相对应的方向的示例。光接收单元121生成指示由光接收单元121接收到的光量的光接收信号,并且光接收单元121将所生成的光接收信号输出到处理装置200。
[0064]
图1所示的存储单元210包括随机存取存储器(ram)、只读存储器(rom)、硬盘或半导体存储器等,并且存储高度图像处理程序。高度图像处理程序可以以存储在计算机可读存储介质中的形式来提供,并且安装在存储单元210中。可替代地,在处理装置200连接到诸如互联网等的网络的情况下,高度图像处理程序可以从网络上的服务器(云服务器)安装在存储单元210中。
[0065]
控制单元220包括能够执行高度图像处理程序的计算机等,并且包括例如中央处理单元(cpu),并且基于高度图像处理程序来控制摄像头部100的操作。另外,控制单元220被配置为能够生成测量对象s的轮廓数据、三维数据或亮度图像数据等。轮廓数据指示测量对象s在由作为x轴方向的x2方向和作为z轴方向的z2方向所限定的平面中的轮廓。三维数
据指示测量对象s的三维形状。亮度图像数据指示测量对象s的表面图像(纹理图像)。稍后将详细描述处理装置200。
[0066]
输入单元300例如包括诸如键盘和指点装置等的输入装置或操作装置,并且可以由用户操作。用户可以通过操作输入单元300来对处理装置200进行预定指定、输入预定信息以及进行预定安装等。
[0067]
显示单元400例如使用液晶显示面板或有机电致发光(el)面板构成。显示单元400可以基于由处理装置200生成的轮廓数据、三维数据或亮度图像数据来显示测量对象s的轮廓数据、三维数据或亮度图像数据等。
[0068]
(2)轮廓数据、高度图像和亮度图像
[0069]
图2的示例中的测量对象s在表面上具有凹槽,该凹槽具有在y1方向上延伸的梯形横截面。摄像头部100利用沿着x1方向的线状光照射在移动方向a上移动的测量对象s的表面。在下文中,利用线状光照射的测量对象s的在y1方向上的位置处的表面的线状区域被称为照射区域t。
[0070]
如图3所示,由照射区域t反射的光通过光接收透镜122入射在光接收单元121上。在这种情况下,当照射区域t中的光的反射位置在z1方向上不同时,反射光在光接收单元121上的入射位置在z2方向上不同。另外,当照射区域t中光的反射位置在x1方向上不同时,反射光在光接收单元121上的入射位置在x2方向上不同。结果,光接收单元121在z2方向上的光入射位置表示照射区域t在z1方向上的位置,并且光接收单元121在x2方向上的光入射位置表示照射区域t在x1方向上的位置。
[0071]
图4是示出光接收单元121的光接收面上的光接收量分布的图。基于图4中的光接收单元121的各像素p的光接收量来生成光接收量分布。如上所述,沿着x2方向和z2方向以二维方式设置光接收单元121的多个像素p。多个像素p沿着z2方向的各个阵列被称为像素阵列ss。多个像素阵列ss在x2方向上布置在光接收单元121的光接收面上。
[0072]
从图2中的照射区域t反射的光入射在图4所示的光接收区域r上。结果,在光接收信号中,光接收区域r的光接收量增加。图5a是示出在x2方向上的一个位置u1处的像素阵列ss中的光接收量分布的图。图5b是示出在x2方向上的另一位置u2处的像素阵列ss中的光接收量分布的图。图5c是示出在x2方向上的又一位置u3处的像素阵列ss中的光接收量分布的图。在图5a至5c中,水平轴表示z2方向上的位置,并且垂直轴表示光接收量。
[0073]
如图5a至5c所示,在各像素阵列ss中的光接收量分布中出现与图4中的光接收区域r相对应的峰p(最大值)。峰p在z2方向上的位置被称为峰位置,并且峰位置的亮度值(光接收量)被称为峰亮度值。在位置u1处的像素阵列ss中,峰位置为v1,并且峰亮度值为i1。在位置u2处的像素阵列ss中,峰位置为v2,并且峰亮度值为i2。在位置u3处的像素阵列ss中,峰位置为v3,并且峰亮度值为i3。峰位置指示测量对象s在照射区域t中的表面(反射面)。
[0074]
在与多个像素阵列ss相对应的多个光接收量分布中各自检测一个峰位置和一个峰亮度值。注意,由于多次反射或漫反射,在像素阵列ss中的光接收量分布中可能出现多个峰。在这种情况下,在已经进行了排除不指示测量对象s在照射区域t中的表面的假峰的处理的状态下,检测到一个峰位置和与该峰位置相对应的峰亮度值。所检测到的峰亮度值指示测量对象s在照射区域t中的表面状态,并且用于生成亮度图像。
[0075]
基于针对各个像素阵列ss检测到的峰位置来生成表示测量对象s的轮廓(照射区
域t的形状)的轮廓数据。在图5a至5c的光接收量分布中检测到的峰位置布置在x2方向上并且被示为连续的线,从而生成表示测量对象s的轮廓的轮廓数据。
[0076]
响应于测量对象s在移动方向a上的相对移动,利用来自光投射单元110的光顺次照射测量对象s在y1方向上的多个位置。因此,当测量对象s在移动方向a上相对移动时,测量对象s在y1方向上的多个位置处的多个照射区域t所反射的光顺次入射在光接收单元121上。结果,针对与y1方向相对应的y2方向上的各个位置,检测在x2方向上的多个位置处的像素阵列ss中的峰位置和峰亮度值。
[0077]
图6是示出所检测到的峰位置与峰亮度值之间的关系的图。如图6所示,针对由x2方向上的位置xi和作为时间轴方向的y2方向上的位置yj定义的点(i和j各自是1或大于1的整数),彼此相关联地检测峰位置z
ij
和峰亮度值i
ij
。结果,将位置xi、位置yj、峰位置z
ij
和峰亮度值i
ij
彼此相关联地存储在图1的存储单元210中。
[0078]
图7a是示出表示测量对象s的三维形状的高度图像hi的图。如图7a所示,通过布置分别与由位置xi和yj限定的点相关联的峰位置z
ij
来生成三维数据。也就是说,表示测量对象s的三维形状的高度图像hi是通过在y2方向上布置对应于多个位置yj所生成的多个轮廓数据来生成的。
[0079]
图7b是示出亮度图像数据的图。如图7b所示,通过布置分别与由位置xi和yj限定的点相关联的峰亮度值i
ij
来生成亮度图像数据。也就是说,通过在y2方向上布置被检测为与多个位置yj的轮廓数据相对应的峰亮度值来生成亮度图像数据。
[0080]
以这种方式,通过测量对象s相对于摄像头部100的移动来生成测量对象s的表面的三维数据和亮度图像数据。尽管在本实施例中移动测量对象s,但是实施例不限于此。测量对象s相对于摄像头部100移动就足够了。因此,可以在不移动测量对象s的情况下移动摄像头部100,并且可以移动测量对象s和摄像头部100这两者。即使在这种情况下,也可以生成测量对象s的三维数据和亮度图像数据。
[0081]
(3)控制单元(控制部)
[0082]
图8是示出图1的处理装置200的详细结构的框图。如图8所示,处理装置200的控制单元220包括轮廓数据生成单元(轮廓数据生成部)201、高度图像生成单元(高度图像生成部)202、检查单元(检查部)203、通信单元204、显示控制单元(显示控制部)205、设置单元(设置接收部)206和光投射/接收控制单元(光投射/接收控制部)211。控制单元220可以执行高度图像处理程序以实现轮廓数据生成单元201、高度图像生成单元202、检查单元203、通信单元204、显示控制单元205和设置单元206的功能。这些功能中的任意两个或多于两个可以一体化并被设置为一个处理单元。
[0083]
光投射/接收控制单元211控制光投射单元110以预定周期在z1方向上发射光,并且控制光接收单元121接收已经穿过光接收透镜122的光。在图8的示例中,光投射/接收控制单元211控制光投射单元110,使得用光周期性地照射在移动方向a上相对移动的测量对象s。当来自测量对象s的反射光被光接收单元121重复地接收时,顺次地输出指示光接收量的光接收信号。
[0084]
轮廓数据生成单元201基于从光接收单元121输出的光接收信号,生成与移动的测量对象s在y2方向上的各个位置相对应的轮廓数据pd。轮廓数据生成单元201还用作用于将所生成的轮廓数据pd输出到高度图像生成单元202、显示控制单元205和设置单元206的部
分。
[0085]
高度图像生成单元202是用于在y2方向上布置由轮廓数据生成单元201生成的多个轮廓数据pd、并且生成表示测量对象s的三维形状的高度图像hi的部分。高度图像生成单元202还用作用于将所生成的高度图像hi输出到检查单元203、显示控制单元205和设置单元206的部分。
[0086]
检查单元203基于由高度图像生成单元202生成的高度图像hi来检查测量对象s,并且包括测量单元203a和判断单元203b。测量单元203a对测量对象s的高度图像hi进行预定测量。判断单元203b基于由测量单元203a测量的测量结果来检查测量对象s。例如,测量单元203a对测量对象s的预定部位的长度和角度等进行测量。然后,判断单元203b基于这样的测量结果和预设阈值等来判断测量对象s是否为无缺陷产品。检查单元203还用作将测量对象s的检查结果输出到通信单元204和显示控制单元205的部分。
[0087]
另外,检查单元203可以基于由轮廓数据生成单元201生成的在y2方向上具有不同位置的多个轮廓数据来进行检查。也就是说,检查单元203可以使用由多个轮廓数据pd构成的高度图像hi来检查测量对象s,以代替使用一个轮廓数据pd来检查测量对象s。在使用由多个轮廓数据pd构成的高度图像hi进行检查的情况下,可以使各个轮廓数据pd的位置偏移,使得构成高度图像hi的多个轮廓数据pd之间的位移如稍后所述减小。
[0088]
通信单元204是用于将检查单元203所获得的检查结果输出到诸如plc等的外部控制装置600的部分。另外,通信单元204还可以从该控制装置600接收信号。在这种情况下,光投射/接收控制单元211可以基于作为外部触发从控制装置600接收到的信号来控制光投射单元110和光接收单元121。
[0089]
显示控制单元205是用于使显示单元400显示由轮廓数据生成单元201生成的轮廓数据pd和由高度图像生成单元202生成的设置用高度图像hi的部分。“设置”是由用户在操作形状检查装置500之前进行的操作,并且由设置单元206执行。高度图像hi是在进行图1所示的形状检查装置500的各种设置时要在显示单元400上显示的图像,因此也可以被称为设置图像。
[0090]
当用户操作输入单元300时,设置单元206是用于检测该操作并且接收与控制单元220相关的各种设置等的部分。设置单元206包括检查设置单元206a和校正设置单元206b。检查设置单元206a设置要由检查单元203使用的检查参数。检查设置单元206a基于在显示单元400上显示的测量对象s的轮廓数据pd或高度图像hi来设置测量对象s的检查区域和公差范围。校正设置单元206b基于在显示单元400上显示的轮廓数据pd或高度图像hi,设置用于定位(对准)由轮廓数据生成单元201生成的轮廓数据pd的方法。稍后将描述校正设置单元206b的细节。
[0091]
(4)高度图像hi的校正
[0092]
当测量对象s相对于摄像头部100移动时,有时在测量对象s和摄像头部100中的至少一个上发生诸如横摇或纵摇等的振动。由于添加了振动成分,因此由高度图像生成单元202生成的高度图像hi中所包括的测量对象的形状变为与测量对象s的实际形状不同的图像。
[0093]
另一方面,轮廓数据生成单元201生成轮廓数据pd,其中在该轮廓数据pd中,在移动测量对象s的y1方向上的各个位置处接收在x1方向上扩散的光。因此,在y1方向上的各个
位置处生成的轮廓数据pd的形状正确地表示在y1方向上的各个位置处的测量对象s的形状。也就是说,在不存在振动成分的影响的范围中,通过在y2方向上布置在y1方向上的各个位置处生成的轮廓数据pd而获得的高度图像hi相对准确地表示测量对象s的形状。然而,当存在振动成分的影响时,假设如下的情况:高度图像生成单元202在y2方向上布置具有由测量对象s在移动期间的振动引起的从原始位置位移的轮廓数据pd,并且由此生成与测量对象s的实际形状不同的高度图像hi。
[0094]
因此,高度图像生成单元202计算由于测量对象s的振动而在轮廓数据pd中引起的位移量。然后,高度图像生成单元202将在y1方向上的各个位置处生成的轮廓数据pd在z2方向和x2方向中的至少一个方向上偏移(移动)了位移量。结果,高度图像生成单元202可以生成更接近测量对象s的形状的高度图像hi。
[0095]
当高度图像生成单元202在z2方向和x2方向中的至少一个方向上偏移了由轮廓数据生成单元201生成的轮廓数据pd时,维持在y1方向上的各个位置处生成的各个轮廓数据pd的形状。因此,高度图像生成单元202可以在不使高度图像hi中所包括的测量对象s的形状失真的情况下校正该高度图像hi。在下文中,将描述高度图像hi的校正的概念。
[0096]
(高度图像的校正的概念)
[0097]
如图2所示,测量对象s相对于摄像头部100移动。在这种情况下,由于带式输送部c上所发生的振动、或在输送期间在测量对象s上发生的振动等,在由轮廓数据生成单元201顺次生成的轮廓数据pd之间发生位移。该位移包括由测量对象s在x1方向(横向方向)上的振动引起的x失准以及由测量对象s在z1方向(高度方向)上的振动引起的z失准。注意,测量对象s在x1方向上的振动导致由轮廓数据生成单元201生成的轮廓数据pd在x2方向上的移位。另外,测量对象s在z1方向上的振动导致由轮廓数据生成单元201生成的轮廓数据pd在z2方向上的移位。
[0098]
将参考图9至图10b描述理想高度图像和包括振动成分的高度图像。
[0099]
图9示出测量对象s的理想高度图像hi。这里,“理想高度图像”是当输送测量对象s的带式输送部c、测量对象s本身和周围环境中不存在振动、并且测量对象s相对于摄像头部100在直线上移动时所获得的高度图像hi。
[0100]
图9所示的测量对象s的高度图像hi被划分为五个区域r1至r5。这里,测量对象s的高度由颜色密度表示。如区域r1和区域r5中所示的具有较高密度的区域表示相对于基准面的高度相对高,并且如区域r3中所示的具有较低密度的区域表示相对于基准面的高度相对低。以这种方式,测量对象s的高度图像hi由在区域r1至r5的各个区域中具有均匀高度的矩形形成。
[0101]
接下来,将参考图10a描述在测量对象s的z1方向上发生振动的情况,即,测量对象s相对于摄像头部100进行纵摇的情况。在测量对象s的z1方向上发生振动的情况下,获得在光接收单元121的z2方向上施加振动的高度图像hi。图10a是该高度图像hi的示例。构成高度图像hi的多个轮廓数据pd各自在z2方向上位移,并且区域r1至r5各自具有与图9所示的理想高度图像的高度不同的高度的区域。
[0102]
图10b示出测量对象s在x1方向上振动的情况,即,测量对象s相对于摄像头部100进行横摇的情况。在测量对象s在x1方向上振动的情况下,获得在光接收单元121的x2方向上施加振动的高度图像hi。图10b是该高度图像hi的示例。构成高度图像hi的多个轮廓数据
pd各自在x2方向上位移,并且区域r1至r5各自具有从矩形形状横向变形的形状。
[0103]
在基于传统频率分析来校正图10a所示的高度图像hi的情况下,可以去除周期性振动成分,但是难以准确地去除非周期性振动成分。也就是说,在传统的振动校正中,振动成分被估计为“周期性的事物”,并且从高度图像hi中去除被视为振动成分的周期性成分。因此,在如图10a所示存在仅在y2方向上的一部分中存在具有不同高度水平的区域的情况、或者非周期性地存在具有不同高度水平的区域的情况下,难以生成准确地去除了振动成分的高度图像hi。在这种情况下,难以完全去除振动成分,使得在区域r1至r5的各个区域中存在残留区域,或者由于错误的过校正而生成过校正区域。残留区域或过校正区域的这种生成是由振动成分的非周期性生成引起的。以这种方式,在传统的振动校正中,难以生成准确地去除了非周期性振动成分的高度图像hi。
[0104]
另外,在传统的振动校正中,在高度方向上进行频率分析,因此,难以校正图10b所示的在x2方向上的位移。在带式输送部c上移动的测量对象s还经历在高度方向上的非周期性振动(位移)、在x方向上的周期性振动(位移)和在x方向上的非周期性振动(位移)。然而,利用传统的振动校正难以应对这种振动(位移),因此,难以准确地检查测量对象s。
[0105]
当将根据本实施例的轮廓对准(振动校正)应用于已经施加了在z2(高度)方向上的振动成分的图10a所示的高度图像hi或者已经施加了在x2(横向)方向上的振动成分的图10b所示的高度图像hi时,获得与图9所示的理想高度图像hi同样的高度图像。也就是说,获得已经校正了在z2方向上的振动成分和在x2方向上的振动成分的高度图像hi。
[0106]
如上所述,在根据本实施例的轮廓对准(振动校正)中,使各个轮廓数据偏移以减小轮廓数据之间的位移。因此,无论振动的周期性如何,都可以校正在测量对象s中发生的振动(位移),并且可以更准确地检查测量对象s。也就是说,高度图像生成单元202可以通过抑制具有非周期性振动的轮廓数据pd之间的位移来生成振动成分被减小的高度图像hi。
[0107]
注意,当在测量对象s上发生在z1方向上的位移和在x1方向上的位移时,可以在z2方向和x2方向这两者上进行轮廓对准(振动校正)。也就是说,可以在z2方向和x2方向中的至少一个方向上执行轮廓对准(振动校正)。
[0108]
(z失准的校正的概述)
[0109]
图11a和11b是用于更详细地描述z失准的校正的图。由轮廓数据生成单元201生成的在y2方向上具有不同位置的多个轮廓数据pd由图11a所示的pd1、pd2、pd3、pd4和pd5表示。另外,测量对象s的移动方向由虚线箭头指示。
[0110]
当测量对象s在没有振动的情况下在带式输送部c上输送时,各个轮廓数据pd1至pd5的z高度在该箭头上对准,该箭头在z2方向上的高度是基准z高度zr。然而,在图11a的示例中,轮廓数据pd从基准z高度zr向上或向下位移。
[0111]
因此,高度图像生成单元202针对各个轮廓数据pd计算z位移量,该z位移量是基准z高度zr与实际z高度之间的差。然后,高度图像生成单元202根据z位移量使轮廓数据pd在z2方向上偏移(移动)。也就是说,高度图像生成单元202计算各个轮廓数据pd的偏移量(移动量),以减小轮廓数据pd之间的位移。然后,高度图像生成单元202根据针对各个轮廓数据所计算出的偏移量来使轮廓数据pd偏移。
[0112]
结果,如图11b所示,可以获得在y2方向上的位置不同的多个轮廓数据pd被对准以在z2方向上具有相等高度的轮廓数据pdz。也就是说,无论轮廓数据pd的位移的周期性如
何,高度图像生成单元202都可以减小轮廓数据pd之间的位移,并且所获得的轮廓数据pdz沿着基准高度zr以直线对准。高度图像生成单元202将以这种方式在z2方向上偏移(移动)的轮廓数据pdz布置在y2方向上,并且生成表示测量对象s的三维形状的高度图像hi。
[0113]
在高度图像hi中,校正在y2方向上位置不同的多个轮廓数据pd之间的z位移。由于检查单元203使用以这种方式去除了z位移的高度图像hi来进行检查,因此高度图像hi可以被称为检查用高度图像。
[0114]
(x失准的校正的概述)
[0115]
图12a和12b是用于更详细地描述上述x失准的校正的图。
[0116]
当测量对象s在没有振动的情况下在带式输送部c上输送时,轮廓数据pd11至pd15的x位置在箭头上对准,该箭头在x2方向上的位置是基准x位置xr。然而,在图12a的示例中,轮廓数据pd从基准x位置向右或向左位移。
[0117]
因此,高度图像生成单元202针对各个轮廓数据pd计算x位移量,该x位移量是基准x位置xr与实际x位置之间的差。然后,高度图像生成单元202根据x位移量使轮廓数据pd在x2方向上偏移(移动)。
[0118]
结果,如图12b所示,无论轮廓数据pd的位移的周期性如何,高度图像生成单元202都可以减小轮廓数据pd之间的位移,并且可以获得在y2方向上的位置不同的多个轮廓数据pd被对准以具有在x2方向上相等的x位置的轮廓数据pdx。高度图像生成单元202将以这种方式在x2方向上偏移的轮廓数据pdx布置在y2方向上,并且生成表示测量对象s的三维形状的高度图像hi。
[0119]
在高度图像hi中,校正在y2方向上的位置不同的多个轮廓数据pd之间的x位移。由于检查单元203使用以这种方式去除了x位移的高度图像hi来进行检查,因此高度图像hi可以被称为检查用高度图像。
[0120]
在下文中,将参考显示在显示单元400上的用户界面具体描述z失准校正和x失准校正。
[0121]
1.z失准校正
[0122]
(用于设置z失准校正的用户界面)
[0123]
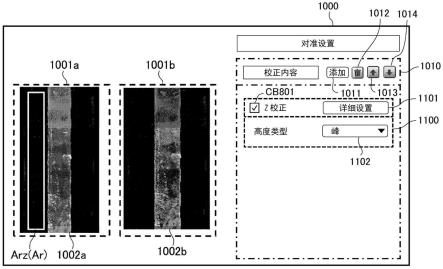
图13a是显示在显示单元400上的对准设置画面1000的用户界面的示例。在该对准设置画面1000上,可以进行z失准的对准设置。对准设置画面1000包括对准前图像显示区域1001a、对准后图像显示区域1001b和参数设置区域1010。在对准前图像显示区域1001a中显示对准前图像1002a。另外,z校正基准区域arz被显示为校正基准区域ar,以叠加在对准前图像1002a上。在对准后图像显示区域1001b中显示对准后图像1002b。在参数设置区域1010中,显示添加按钮1011、被配置为删除设置项的删除按钮1012、被配置为改变设置项的顺序的向上按钮1013和向下按钮1014、以及用于进行z失准的校正设置的z校正设置区域1100。
[0124]
在z校正设置区域1100中,显示用于切换是否执行z校正的复选框cb801、被配置为进行z校正的详细设置的详细设置按钮1101以及高度类型选择栏1102,该高度类型选择栏1102是用于计算用作z校正的基准的高度的方法。
[0125]
当显示控制单元205检测到输入单元300已经选择了详细设置按钮1101时,显示控制单元205在显示单元400的对准设置画面1000上显示z校正详细设置区域1110。图13b中示出了z校正详细设置区域1110的示例。
[0126]
在z校正详细设置区域1110中,显示用于选择z校正基准区域arz的形状的校正区域选择栏1111、用于切换是否将第二z校正基准区域arz设置为校正基准区域ar的复选框cb802、用于选择第二z校正基准区域arz的形状的校正区域选择栏1111、用于设置x2方向上的移动平均的移动平均选择栏1112、以及被配置为针对特定值或更大以及特定值或更小的轮廓数据设置掩模的掩模上限设置栏1113和掩模下限设置栏1114。
[0127]
(校正设置过程和检查用高度图像的生成)
[0128]
将参考图14a至14c的流程图描述用于基于在对准设置画面1000上设置的对准设置来生成检查用高度图像的方法。
[0129]
图14a是示出z失准校正的对准设置过程的图。在开始之后,首先,光投射/接收控制单元211控制摄像头部100以周期性地进行利用光投射单元110的光投射和利用光接收单元121的光接收,并且重复地拍摄测量对象s的图像(步骤s2001)。
[0130]
接下来,轮廓数据生成单元201基于通过在步骤s2001中的拍摄而重复输出的光接收信号,来生成多个轮廓数据pd(步骤s2002)。
[0131]
随后,高度图像生成单元202基于在步骤s2002中生成的多个轮廓数据pd来生成表示测量对象s的三维形状的高度图像hi(步骤s2003)。
[0132]
此后,高度图像生成单元202将在s2003中生成的高度图像hi输出到显示控制单元205(步骤s2004)。
[0133]
然后,显示控制单元205使显示单元400显示在s2004中从高度图像生成单元202输出的高度图像hi(步骤s2005)。
[0134]
接下来,显示控制单元205检测由用户进行的输入单元300的操作,并且在显示单元400上显示在y2方向上延伸的z校正基准区域arz作为校正基准区域ar(步骤s2006)。
[0135]
接下来,校正设置单元206b从显示控制单元205获取在s2006中设置的在y2方向上延伸的z校正基准区域arz(步骤s2007)。
[0136]
另外,校正设置单元206b接收由用户进行的校正参数的设置(步骤s2008)。这里所设置的校正参数可以包括在复选框cb801中设置的z校正的存在或不存在、在高度类型选择栏1102中选择的高度类型、在校正区域选择栏1111中选择的z校正基准区域arz的形状、在复选框cb802中选择的第二z校正基准区域arz的设置的存在或不存在、在移动平均选择栏1112中选择的x方向上的移动平均数、在掩模上限设置栏1113中设置的掩模上限值和在掩模下限设置栏1114中设置的掩模下限值。在下文中,z校正基准区域arz是指z校正基准区域arz和第二z校正基准区域arz中的至少一个。
[0137]
接下来,校正设置单元206b将在s2008中设置的校正参数存储在校正设置单元206b中(步骤s2009)。稍后将参考图17描述校正参数的存储。
[0138]
注意,在显示单元400上显示z校正基准区域arz不是必需的。例如,校正设置单元206b可以接收两个坐标的输入,并且将以接收到的坐标作为矩形的对角线的区域设置为z校正基准区域arz。
[0139]
通过上述s2001至s2008的处理完成对准设置。
[0140]
接下来,将参考图14b的流程图描述用于生成检查用高度图像的方法。
[0141]
首先,高度图像生成单元202获取由校正设置单元206b设置的z校正基准区域arz和来自校正设置单元206b的校正参数(步骤s2011)。
[0142]
随后,光投射/接收控制单元211控制摄像头部100以周期性地进行利用光投射单元110的光投射和利用光接收单元121的光接收,并且重复地拍摄测量对象s的图像(步骤s2012)。
[0143]
接下来,轮廓数据生成单元201基于通过步骤s2012中的拍摄而重复输出的光接收信号,来生成多个轮廓数据pd(步骤s2013)。
[0144]
接下来,高度图像生成单元202根据在s2011中获取的校正基准区域ar和校正参数,使在s2013中获取的轮廓数据pd在z2方向上偏移(移动),以减小轮廓数据pd之间的位移。结果,进行作为轮廓数据pd的位移校正的轮廓对准(步骤s2014)。将参考图14c描述s2014中的轮廓对准的细节。
[0145]
随后,高度图像生成单元202在y2方向上布置在s2014中被对准的轮廓数据pd以使其彼此接合。结果,生成减小了在y2方向上的位置不同的多个轮廓数据之间在z2方向上的位移的检查用高度图像(步骤s2015)。
[0146]
通过上述s2011至s2015的处理来校正高度图像。
[0147]
接下来,将参考图14c中的流程图详细描述s2014中的轮廓对准。
[0148]
首先,高度图像生成单元202针对从轮廓数据生成单元201获取的多个轮廓数据pd中的各个轮廓数据,识别存在于z校正基准区域arz中的轮廓数据(步骤s2021)。
[0149]
接下来,高度图像生成单元202针对多个轮廓数据pd中的各个轮廓数据,从在s2021中识别的z校正基准区域arz中的轮廓数据pd提取特征点(步骤s2022)。
[0150]
随后,高度图像生成单元202基于从多个轮廓数据pd中的各个轮廓数据计算出的特征点的z高度,来计算基准z高度zr(步骤s2023)。作为基准z高度zr,例如,可以使用多个特征点的z高度的平均值。另外,从z校正基准区域arz中的第一行的轮廓数据pd提取的特征点的z高度可以用作基准z高度zr。
[0151]
接下来,高度图像生成单元202针对多个轮廓数据pd中的各个轮廓数据,计算基准z高度zr与从一个轮廓数据提取的特征点的z高度之间的差(步骤s2024)。这里所计算出的差与一个轮廓数据在轮廓对准期间的偏移量相对应。注意,计算作为偏移量的差,以减小多个轮廓数据pd之间的位移。
[0152]
接下来,高度图像生成单元202将多个轮廓数据pd中的各个轮廓数据在z2方向上偏移了作为在s2024中计算出的偏移量的差(步骤s2025)。
[0153]
通过s2021至s2025的上述处理,轮廓被对准,并且无论多个轮廓数据pd的位移周期(振动周期)如何,非周期性位移也被减小。
[0154]
(校正参数与校正内容之间的关系)
[0155]
将描述图13a和13b中所设置的校正参数与轮廓数据pd的对准之间的关系。
[0156]
(z校正基准区域arz)
[0157]
z校正基准区域arz被设置为在y2方向上延伸的二维区域。也就是说,在x2-y2平面中,将具有y2方向作为纵向方向的二维区域设置为z校正基准区域arz。由于以这种方式设置在y2方向上延伸的z校正基准区域arz,因此可以沿着y2方向设置基准z高度zr。然后,高度图像生成单元202根据沿着y2方向所设置的基准z高度zr来布置在y2方向上的各个位置处生成的多个轮廓数据pd。也就是说,由高度图像生成单元202对准轮廓数据pd,以减小在y2方向上的位置不同的轮廓数据pd之间生成的位移。
[0158]
高度图像生成单元202计算偏移量以校正在y2方向上的位置不同的轮廓数据pd之间生成的位移,并且偏移轮廓数据pd。沿着y2方向计算基准z高度,以校正在y2方向上的位置不同的轮廓数据之间生成的位移。为了沿着y2方向计算基准z高度,将与作为测量对象s的移动方向的y1方向而不是x2方向相对应、并且在作为时间轴方向的y2方向上延伸的区域指定为z校正基准区域arz。
[0159]
(高度类型选择栏1102)
[0160]
图13a所示的高度类型选择栏1102是选择用于从在y2方向上延伸的多个轮廓数据pd中的各个轮廓数据提取特征点的方法的选择栏。高度类型选择栏1102可以采用预先准备有“峰”、“底”和“平均”等的下拉方法。例如,校正设置单元206b响应于显示控制单元205检测到在高度类型选择栏1102中选择了“峰”,接收作为高度类型的“峰”的设置,该高度类型是校正参数之一。当检测到“峰”被设置为高度类型时,高度图像生成单元202对从轮廓数据生成单元201获取的多个轮廓数据pd中的各个轮廓数据进行与高度类型“峰”相对应的z失准校正。
[0161]
具体地,高度图像生成单元202针对从轮廓数据生成单元201获取的多个轮廓数据pd中的各个轮廓数据,提取轮廓数据pd的高度变为峰的点作为特征点。然后,高度图像生成单元202基于在设置期间提取的多个特征点来计算用作轮廓数据pd的对准基准的基准z高度zr。接下来,高度图像生成单元202针对在操作期间从轮廓数据生成单元201获取的多个轮廓数据pd中的各个轮廓数据,提取轮廓数据pd的高度变为峰的特征点。然后,高度图像生成单元202使轮廓数据pd在z2方向上偏移,使得所提取的特征点的z高度变为基准z高度zr。也就是说,高度图像生成单元202可以通过进行轮廓数据pd与作为对准基准的基准z高度zr的对准(进行对准),来减小在y2方向上的位置不同的轮廓数据pd之间生成的位移。
[0162]
当在高度类型选择栏1102中选择了“底”时,高度图像生成单元202提取轮廓数据pd的高度为底的点来代替轮廓数据pd的高度为峰的位置,作为特征点。除了提取特征点的方法之外,适用与上述“峰”的情况相同的描述。
[0163]
当在高度类型选择栏1102中选择了“平均”时,高度图像生成单元202可以使用存在于z校正基准区域arz中的轮廓数据pd的z高度的平均值作为特征点的z高度。
[0164]
(校正区域选择栏1111)
[0165]
图13b所示的校正区域选择栏1111选择z校正基准区域arz的形状。例如,校正区域选择栏1111可以采用预先准备有“矩形”和“跟随”等的下拉方法。
[0166]
当检测到在校正区域选择栏1111中选择了“矩形”时,显示控制单元205在对准前图像显示区域1001a中显示z校正基准区域arz。另外,校正设置单元206b可以接收z校正基准区域arz的任意边的移动,使得z校正基准区域arz的区域可以相应地改变。此外,除了校正区域选择栏1111之外或者代替校正区域选择栏1111,校正设置单元206b可以接收用户对至少两个点的坐标的输入,并且将以这两个点作为对角线的矩形设置为z校正基准区域arz。
[0167]
当检测到在校正区域选择栏1111中选择了“矩形”时,校正设置单元206b将“矩形”设置为作为校正参数之一的校正区域。此外,校正设置单元206b从显示控制单元205获取z校正基准区域arz,并且接收作为z校正基准区域arz的设置。
[0168]
另外,当检测到在校正区域选择栏1111中选择了“跟随”时,校正设置单元206b接
收“跟随”的设置作为校正区域,该校正区域是校正参数之一。注意,该“跟随”适合于z校正基准区域arz具有沿着任意边缘的形状的情况。当在校正区域选择栏1111中选择了“跟随”时,高度图像生成单元202从在设置期间从轮廓数据生成单元201获取的多个轮廓数据pd中的各个轮廓数据提取特征点。然后,高度图像生成单元202基于特征点、相对于在校正设置单元206b中预先设置的特征点的偏移量和z校正基准区域arz的宽度来计算z校正基准区域arz。高度图像生成单元202在校正设置单元206b中设置以这种方式计算出的z校正基准区域arz。
[0169]
注意,稍后将描述在除了z校正基准区域arz之外还将第二z校正基准区域arz设置为校正基准区域ar的情况下进行的轮廓对准。
[0170]
(掩模上限设置栏1113和掩模下限设置栏1114)
[0171]
图13b所示的掩模上限设置栏1113是用于针对具有特定值或更大的z高度的轮廓数据pd设置掩模的设置栏。另外,掩模下限设置栏1114是用于针对具有特定值或更小的z高度的轮廓数据pd设置掩模的设置栏。
[0172]
例如,掩模上限设置栏1113和掩模下限设置栏1114可以响应于由用户进行的对输入单元300的操作而接收任何值的输入。例如,存在这样的情况:当测量对象s在带式输送部c上输送时,难以预先预测该测量对象s出现在带式输送部c的宽度方向上的哪个位置处。在这种情况下,可以在宽范围内设置z校正基准区域arz的同时,在用于特征点提取的轮廓数据pd的z高度范围内设置掩模。
[0173]
当上限值被输入到掩模上限设置栏1113时,校正设置单元206b接收输入到掩模上限设置栏1113的上限值的设置作为掩模上限值,该掩模上限值是校正参数之一。在这种情况下,高度图像生成单元202从校正设置单元206b获取掩模上限值,并且从掩模上限值或更小的范围内的轮廓数据pd提取特征点。
[0174]
当下限值被输入到掩模下限设置栏1114时,校正设置单元206b接收输入到掩模下限设置栏1114的下限值的设置作为掩模下限值,该掩模下限值是校正参数之一。在这种情况下,高度图像生成单元202从校正设置单元206b获取掩模下限值,并且从掩模下限值或更大的范围内的轮廓数据pd提取特征点。
[0175]
当在掩模上限设置栏1113和掩模下限设置栏1114中输入上限值和下限值时,校正设置单元206b接收输入到掩模上限设置栏1113的上限值和输入到掩模下限设置栏1114的下限值的设置作为掩模上限值和掩模下限值,掩模上限值和掩模下限值各自是校正参数之一。在这种情况下,高度图像生成单元202从校正设置单元206b获取掩模上限值和掩模下限值,并且从掩模下限值或更大以及掩模上限值或更小的范围内的轮廓数据pd提取特征点。
[0176]
2.x失准校正
[0177]
(用于x失准校正的设置的用户界面)
[0178]
图15a和15b是示出用于进行x失准的对准设置的对准设置画面1000的图。在该对准设置画面1000上,可以进行x失准的对准设置。这里,将主要说明与图13a不同的部分。作为校正基准区域ar的x校正基准区域arx显示在对准设置画面1000上,以叠加在对准前图像1002a上。另外,在参数设置区域1010中显示用于进行x失准校正设置的x校正设置区域1200。
[0179]
在x校正设置区域1200中,显示用于切换是否执行x校正的复选框cb803、被配置为
进行x校正的详细设置的详细设置按钮1201、用于选择边缘检测对象的边缘选择栏1202、用于设置边缘水平的边缘水平设置栏1203、以及用于自动设置边缘水平的自动设置按钮1204。
[0180]
当显示控制单元205检测到输入单元300选择了详细设置按钮1201时,显示控制单元205在显示单元400的对准设置画面1000上显示x校正详细设置区域1210。图15b中示出x校正详细设置区域1210的示例。在x校正详细设置区域1210中,显示被配置为设置x校正基准区域arx的编辑按钮1211、用于设置边缘水平的边缘水平设置栏1203、用于自动设置边缘水平的自动设置按钮1204、用于设置边缘方向的边缘方向选择栏1212、用于选择边缘的检测方向的检测方向选择栏1213、以及用于设置检测标签的检测标签设置栏1214。此外,可以显示用于选择是否使用第二x校正基准区域arx的复选框cb804。当检测到复选框cb804被选中时,校正设置单元206b接收第二x校正基准区域arx的设置作为校正基准区域ar。细节与于x校正基准区域arx的设置相同,因此省略。
[0181]
(校正设置过程和检查用高度图像的生成)
[0182]
将描述用于基于在对准设置画面1000上设置的对准设置来生成检查用高度图像的方法。
[0183]
首先,根据图14a和14b的流程图进行对准设置和检查用高度图像hi的生成。注意,这里将主要描述与图14a和14b的流程图的不同之处。x校正基准区域arx用作校正基准区域ar。
[0184]
另外,在s2008中设置的校正参数可以包括在图15a和15b中设置的各种参数,诸如在图15a所示的复选框cb803中设置的x校正的存在或不存在、x校正基准区域arx、在边缘选择栏1202中选择的边缘类型、在边缘水平设置栏1203中设置的边缘水平、在边缘方向选择栏1212中选择的边缘方向、在检测方向选择栏1213中设置的检测方向、以及在检测标签设置栏1214中设置的检测标签。在下文中,x校正基准区域arx是指x校正基准区域arx和第二x校正基准区域arx中的至少一个。
[0185]
另外,高度图像生成单元202在s2014中使在s2013中获取的轮廓数据pd在x2方向上偏移。结果,进行作为轮廓数据pd的位移校正的轮廓对准。将参考图16描述轮廓对准的细节。
[0186]
接下来,将参考图16中的流程图描述s2014中的轮廓对准。
[0187]
首先,高度图像生成单元202针对从轮廓数据生成单元201获取的多个轮廓数据pd中的各个轮廓数据,识别存在于x校正基准区域arx中的轮廓数据pd(步骤s2221)。
[0188]
接下来,高度图像生成单元202针对多个轮廓数据中的各个轮廓数据,从在s2221中提取的x校正基准区域arx中的轮廓数据pd提取作为特征点的边缘点(步骤s2222)。
[0189]
随后,高度图像生成单元202基于从多个轮廓数据pd中的各个轮廓数据计算出的特征点的x位置来计算基准x位置xr(步骤s2223)。作为基准x位置xr,例如,可以使用多个特征点的x位置的平均值。另外,从x校正基准区域arx中的第一行的轮廓数据pd提取的特征点的x位置可以用作基准x位置xr。
[0190]
接下来,高度图像生成单元202针对多个轮廓数据pd中的各个轮廓数据,计算基准x位置xr与从一个轮廓数据pd提取的特征点的x位置之间的差(步骤s2224)。这里所计算出的差与一个轮廓数据pd在轮廓对准期间的偏移量相对应。注意,计算作为偏移量的差,以减
小多个轮廓数据pd之间的位移。
[0191]
接下来,高度图像生成单元202将多个轮廓数据pd中的各个轮廓数据在x2方向上偏移了作为在s2224中计算出的偏移量的差(步骤s2225)。
[0192]
通过s2221至s2225的上述处理,轮廓被对准,并且无论多个轮廓数据pd的位移周期(振动周期)如何,非周期性失准都被校正。
[0193]
(校正参数与校正内容之间的关系)
[0194]
将描述图16中所设置的校正参数与轮廓对准之间的关系。
[0195]
(x校正基准区域arx)
[0196]
x校正基准区域arx被设置为在y2方向上延伸的二维区域。也就是说,在x2-y2平面中,将具有y2方向作为纵向方向的二维区域设置为x校正基准区域arx。由于以这种方式设置在y2方向上延伸的x校正基准区域arx,因此可以沿着y2方向设置作为x位置的基准的基准x位置xr。然后,高度图像生成单元202根据沿着y2方向所设置的基准x位置xr来布置在y2方向上的各个位置处生成的多个轮廓数据pd。也就是说,高度图像生成单元202校正轮廓数据pd,以减小在y2方向上的位置不同的轮廓数据pd之间生成的位移。注意,在x校正基准区域arx中,y2方向表示应用轮廓校正的范围,以及x2方向表示计算校正量的范围。
[0197]
(边缘选择栏1202)
[0198]
图15a所示的边缘选择栏1202是用于选择图像以提取作为特征点的边缘点的选择栏。例如,边缘选择栏1202可以在高度图像hi和亮度图像ii之间可选择。稍后将描述使用亮度图像ii进行轮廓对准的情况。
[0199]
(边缘水平设置栏1203)
[0200]
图15a所示的边缘水平设置栏1203是被配置为检测边缘点的设置栏,该边缘点是存在于x校正基准区域arx中的轮廓数据pd的特征点。高度图像生成单元202检测轮廓数据pd与在边缘水平设置栏1203中设置的边缘水平相交的点作为边缘点,该边缘点是特征点。
[0201]
校正设置单元206b获取输入到边缘水平设置栏1203的边缘水平,并且接收输入到边缘水平设置栏1203的边缘水平的设置作为边缘水平,该边缘水平是校正参数之一。另外,当检测到点击了自动设置按钮1204时,校正设置单元206b将边缘水平设置指示输出到高度图像生成单元202。已经接收到边缘水平设置指示的高度图像生成单元202自动设置边缘水平,并且在校正设置单元206b中设置边缘水平。作为边缘水平,例如,可以使用包括在x校正基准区域arx中的轮廓数据的平均值。
[0202]
(边缘方向选择栏1212)
[0203]
图15b所示的边缘方向选择栏1212是用于设置在检测到作为特征点的边缘点时的轮廓的改变方向的设置栏。边缘方向选择栏1212可以采用预先准备有“两个方向”、“上升”和“下降”等的下拉方法。例如,当检测到在边缘方向选择栏1212中选择了“上升”时,校正设置单元206b接收“上升”的设置作为边缘方向,该边缘方向是校正参数之一。在边缘水平设置栏1203中将1mm设置为边缘水平、并且在边缘方向选择栏1212中将“上升”设置为边缘方向的情况下,高度图像生成单元202提取轮廓数据与通过将基准面偏移了1mm而获得的参照面从下向上相交的点作为边缘点,该边缘点是特征点。注意,在选择了“下降”作为边缘方向的情况下,高度图像生成单元202提取轮廓数据与参照面从上向下相交的点作为特征点。另外,在选择了“两个方向”作为边缘方向的情况下,无论与参照面相交的方向如何,高度图像
生成单元202在x校正基准区域arx中都提取与参照面相交的点作为特征点。
[0204]
(检测方向选择栏1213)
[0205]
图15b所示的检测方向选择栏1213是用于设置检测作为特征点的边缘点的方向的设置栏。检测方向选择栏1213可以采用预先准备有诸如“从右到左(
←
)”和“从左到右(
→
)”等的表示方向的选项的下拉方法。例如,当检测到在检测方向设置栏1213中选择了从右到左检测边缘的选项时,校正设置单元206b接收“从右到左”的设置作为检测方向,该检测方向是校正参数之一。在这种情况下,高度图像生成单元202按轮廓数据pd的从右到左的顺序提取作为特征点的边缘点。
[0206]
基于如上所述设置的作为校正参数的x校正基准区域arx、边缘水平、边缘方向和检测方向,高度图像生成单元202针对多个轮廓数据pd分别提取边缘点作为特征点。注意,没有必要总是在提取特征点时使用所有上述校正参数。至少可以将x校正基准区域arx设置为校正参数。
[0207]
将进一步描述轮廓数据pd的x失准校正和检查用高度图像的生成。
[0208]
高度图像生成单元202针对在设置期间从轮廓数据生成单元201获取的多个轮廓数据pd中的各个轮廓数据,提取轮廓数据pd的边缘点作为特征点。例如,高度图像生成单元202可以计算从轮廓数据pd提取的特征点的平均,并且将这样的平均值设置为作为轮廓数据的校正基准的基准x位置xr。然后,高度图像生成单元202针对在操作期间从轮廓数据生成单元201获取的多个轮廓数据pd中的各个轮廓数据,提取边缘点作为轮廓数据pd的特征点。然后,高度图像生成单元202使轮廓数据pd在x2方向上偏移,使得所提取的特征点的x位置变为基准x位置xr。以这种方式,可以获得经校正以使得特征点的x位置在基准x位置xr上对准的轮廓数据pd。然后,高度图像生成单元202将在x2方向上偏移的轮廓数据pd布置在y2方向上,并且将轮廓数据pd接合以生成检查用高度图像。
[0209]
(存储校正参数的方法)
[0210]
将参考图17描述用于存储图13a和13b中所设置的用于z校正的校正参数和图15a和15b中所设置的用于x校正的校正参数的方法。
[0211]
各个校正参数针对每个校正方法在校正设置单元206b中设置。作为与z校正相关的校正参数,设置在复选框cb801中选择的z校正的存在或不存在、z校正基准区域arz、掩模上限值和掩模下限值。这里,如图17所示,z校正基准区域可以存储位于显示单元22上所显示的z校正基准区域arz的对角线上的两个点的坐标。另外,作为与x校正相关的校正参数,设置在复选框cb803中选择的x校正的存在或不存在、x校正基准区域arx、边缘水平、边缘方向和检测方向。
[0212]
也就是说,校正设置单元206b具有被分类为存储校正方法的较高层级以及存储与校正方法相对应的校正参数的较低层级的层级结构。所设置的校正参数中的各个参数以取决于作为较高层级的校正方法的形式而存储在校正设置单元206b中。由于以这种方式以层级形式设置校正参数,因此可以容易地识别与各个校正参数相关的任何校正方法,并且可以高效地实现校正处理。
[0213]
(计算偏移量的方法)
[0214]
将参考图18a至18c描述用于计算偏移量的方法。
[0215]
图18a是示出将一个区域指定为校正基准区域ar的情况的图。在该示例中,高度图
像由在y2方向上的位置不同的八个轮廓数据pd21至pd28构成。另外,在八个轮廓数据pd21至pd28中,pd22至pd26存在于校正基准区域ar中的内部区域ri中,并且三个轮廓数据pd21、pd27和pd28存在于校正基准区域ar之外的外部区域ro中。
[0216]
此外,并不总是可以针对存在于内部区域ri中的所有轮廓数据pd22至pd26来计算偏移量。可能存在如下的情况:由于例如不存在超过被设置为校正参数的边缘水平的边缘等,高度图像生成单元202难以提取特征点,并且作为结果,难以计算偏移量。例如,假设高度图像生成单元202在计算轮廓数据pd23的偏移量方面失败。将描述在这种情况下计算偏移量的方法。
[0217]
首先,将内部区域ri中的轮廓数据pd22的偏移量用作外部区域ro中的轮廓数据pd21的偏移量。另外,将内部区域ri中的轮廓数据pd26的偏移量用作外部区域ro中的轮廓数据pd27和pd28的偏移量。即,基于内部区域ri中的轮廓数据pd的偏移量来计算外部区域ro中的轮廓数据pd的偏移量。例如,内部区域ri中的最外面的轮廓数据pd的偏移量可以用作外部区域ro中的轮廓数据pd的偏移量,或者可以使用通过从内部区域ri的外部按顺序对多个轮廓数据pd的偏移量取平均而获得的值。此外,可以将外部区域ro的轮廓数据pd的偏移量计算为随着距内部区域ri的距离的增加而逐渐减小。
[0218]
接下来,由于关于内部区域ri中的轮廓数据pd22和pd24至pd26的偏移量,针对各个轮廓数据pd计算了偏移量,因此可以直接使用所计算出的偏移量。
[0219]
然后,基于在前轮廓数据pd22和在后轮廓数据pd24的偏移量,计算存在于内部区域ri但在计算偏移量方面失败的轮廓数据pd23的偏移量。例如,可以根据pd22和pd24的偏移量的内分来计算pd23的偏移量,或者可以计算pd22和pd24的偏移量的平均值作为pd23的偏移量。
[0220]
图18b是示出第一校正基准区域ar1和第二校正基准区域ar2被指定为校正基准区域ar、并且第一校正基准区域ar1和第二校正基准区域ar2在y2方向上不重叠的情况的图。在图18b中,将主要描述与图18a不同的内容。
[0221]
在图18b的示例中,指定了在y2方向上不重叠的两个校正基准区域ar,并且存在由内部区域ri围绕的中间区域rm。可以基于内部区域ri中的轮廓数据pd33和pd36的偏移量来计算存在于中间区域rm中的轮廓数据pd34和pd35的偏移量。例如,存在于中间区域rm中的轮廓数据pd34和pd35的偏移量可以根据pd33和pd36的偏移量的内分来计算,或者可以根据pd33和pd36的偏移量的平均来计算。也就是说,基于包括在第一校正基准区域ar1中的轮廓数据的偏移量和包括在第二校正基准区域ar2中的轮廓数据的偏移量,计算存在于不包括在校正基准区域ar中的中间区域rm中的轮廓数据pd的偏移量。
[0222]
图18c是示出第一校正基准区域ar1和第二校正基准区域ar2被指定为校正基准区域ar、并且这些校正基准区域ar1和ar2在y2方向上重叠的情况的图。这里,将主要描述与图18a和18b不同的内容。
[0223]
由于在图18c的示例中指定了在y2方向上重叠的两个校正基准区域ar1和ar2,因此存在由这两个校正基准区域ar1和ar2指定的重叠区域rd。可以使用针对存在于第一校正基准区域ar1中的轮廓数据pd所计算出的偏移量和针对存在于第二校正基准区域ar2中的轮廓数据pd所计算出的偏移量的平均值,来计算存在于重叠区域rd中的轮廓数据pd43和pd44的偏移量。另外,存在于重叠区域rd中的轮廓数据pd的偏移量也可以基于相对于在前
或在后轮廓数据pd的变化量来确定,而不限于上述平均值。另外,高度图像生成单元202确定针对存在于第一校正基准区域ar1中的轮廓数据pd所计算出的偏移量与针对存在于第二校正基准区域ar2中的轮廓数据pd所计算出的偏移量之间的差是否落在预定阈值内,并且当判断为该差落在阈值内时,将针对存在于第一校正基准区域ar1中的轮廓数据pd所计算出的偏移量和针对存在于第二校正基准区域ar2中的轮廓数据pd所计算出的偏移量的平均值用作存在于重叠区域rd中的轮廓数据pd的偏移量。另外,当高度图像生成单元202判断为差不落在阈值内时,还可以基于相对于在前或在后轮廓数据pd的变化量来确定存在于重叠区域rd中的轮廓数据pd的偏移量。
[0224]
在测量对象s的一部分中生成诸如裂纹和划痕等的缺陷点的情况下,与缺陷点相对应的轮廓数据pd与测量对象s的原始轮廓数据pd不同。即使在这种情况下,也可以通过对由高度图像生成单元202计算出的存在于第一校正基准区域ar1中的轮廓数据pd的偏移量和存在于第二校正基准区域ar2中的轮廓数据pd的偏移量进行比较,来判断各个偏移量的有效性。当各个偏移量落在阈值内时(即,偏移量彼此接近时),高度图像生成单元202判断为在测量对象中不存在缺陷点并且这两个偏移量都是有效的。另外,当各个偏移量彼此偏离了阈值或更大时,高度图像生成单元202判断为在测量对象中生成缺陷点并且这些偏移量之一的有效性低。
[0225]
将给出关于如下的方法的描述,该方法用于基于相对于在前或在后轮廓数据pd的偏移量的变化量来确定存在于重叠区域rd中的轮廓数据pd的偏移量。
[0226]
作为示例,假设根据第一校正基准区域ar1计算出的轮廓数据pd43的偏移量为10,并且根据第二校正基准区域ar2计算出的轮廓数据pd43的偏移量为100。另外,假设根据第一校正基准区域ar1计算出的轮廓数据pd44的偏移量为8,并且根据第二校正基准区域ar2计算出的轮廓数据pd44的偏移量为150。
[0227]
在这种情况下,根据第一校正基准区域ar1计算出的轮廓数据pd44的偏移量与根据第一校正基准区域ar1计算出的紧接在前的轮廓数据pd43的偏移量相比改变了2。另一方面,根据第二校正基准区域ar2计算出的轮廓数据pd44的偏移量与根据第二校正基准区域ar2计算出的紧接在前的轮廓数据pd43的偏移量相比改变了50。由于在根据第一校正基准区域ar1计算出的偏移量中与在根据第二校正基准区域ar2计算出的偏移量中相比,相对于紧接在前的轮廓数据pd的偏移量的变化量小,因此可以使用作为根据第一校正基准区域ar1计算出的偏移量的8作为轮廓数据pd44的偏移量。
[0228]
也就是说,存在于重叠区域rd中的一个轮廓数据pd的偏移量可以通过与该一个轮廓数据pd之前和之后的轮廓数据pd中的至少一个的偏移量进行比较来确定。
[0229]
具体地,高度图像生成单元202关于根据第一校正基准区域ar1计算出的偏移量,将一个轮廓数据pd的偏移量与存在于该一个轮廓数据pd之前或之后的参照轮廓数据pd的偏移量进行比较,以计算差。
[0230]
此外,高度图像生成单元202关于根据第二校正基准区域ar2计算出的偏移量,将一个轮廓数据pd的偏移量与存在于该一个轮廓数据pd之前或之后的参照轮廓数据pd的偏移量进行比较,以计算差。然后,高度图像生成单元202可以将根据第一校正基准区域ar1计算出的差与根据第二校正基准区域ar2计算出的差进行比较,并且将较小的差确定为该一个轮廓数据pd的偏移量。由于以这种方式在第一校正基准区域ar1和第二校正基准区域ar2
中基于相对于在前或在后的轮廓数据pd的变化量来计算轮廓数据pd的偏移量,因此可以将被估计为振动成分的逐渐变化用作偏移量。
[0231]
(x失准校正的另一实施例)
[0232]
如上所述,已经描述了用于基于作为所提取的特征点的边缘点来进行x失准校正的方法。接下来,将参考图19、图20a和20b描述x失准校正的另一实施例。
[0233]
(用户界面)
[0234]
图19是示出用于进行x失准校正设置的对准设置画面1000的示例的图。这里,将描述用于校正x失准的方法。
[0235]
当显示控制单元205检测到输入单元300已经选择了图15a所示的详细设置按钮1201时,显示控制单元205在显示单元400的对准设置画面1000上显示x校正详细设置区域1210。在x校正详细设置区域1210中,可以设置第一x校正基准区域arx1和第二x校正基准区域arx2。另外,可以针对第一x校正基准区域arx1和第二x校正基准区域arx2各自显示被配置为设置x校正基准区域arx的编辑按钮1211、用于设置边缘水平的边缘水平设置栏1203、用于自动设置边缘水平的自动设置按钮1204、用于设置边缘方向的边缘方向选择栏1212、用于选择边缘的检测方向的检测方向选择栏1213、以及用于设置检测标签的检测标签设置栏1214。注意,可以根据复选框cb804的所选状态来选择是否使用第二x校正基准区域arx2以进行x失准校正。
[0236]
(校正设置过程和检查用高度图像的生成)
[0237]
将参考图20a和20b的流程图描述用于基于在对准设置画面1000上设置的对准设置来生成检查用高度图像的方法。
[0238]
图20a是示出用于x失准的对准设置过程的图。这里,将主要描述与图14a所示的流程图的不同之处。
[0239]
在步骤s2606中,显示控制单元205检测由用户进行的对输入单元300的操作,并且在显示单元400上显示在y2方向上延伸的第一x校正基准区域arx1和第二x校正基准区域arx2。
[0240]
接下来,在步骤s2607中,校正设置单元206b从显示控制单元205获取在s2606中设置的在y2方向上延伸的第一x校正基准区域arx1和第二x校正基准区域arx2。
[0241]
另外,在步骤s2608中,校正设置单元206b接收由用户进行的对校正参数的设置。这里所设置的校正参数还包括第一x校正基准区域arx1和第二x校正基准区域arx2作为x校正基准区域arx。
[0242]
接下来,通过与图14b中的过程相同的过程来生成检查用高度图像。
[0243]
接下来,将参考图20b的流程图描述图14b的s2014中所示的轮廓对准。
[0244]
首先,高度图像生成单元202针对从轮廓数据生成单元201获取的多个轮廓数据pd中的各个轮廓数据,识别存在于第一x校正基准区域arx1和第二x校正基准区域arx2中的轮廓数据pd(步骤s2621)。
[0245]
接下来,高度图像生成单元202针对多个轮廓数据pd中的各个轮廓数据,从在s2621中识别的第一x校正基准区域arx1中的轮廓数据pd中提取作为第一特征点的边缘点(步骤s2622)。作为第一特征点的该边缘点是被配置为计算特征点的第一辅助特征点。
[0246]
接下来,高度图像生成单元202针对多个轮廓数据pd中的各个轮廓数据,从在
s2621中识别的第二x校正基准区域arx2中的轮廓数据pd中提取作为第二特征点的边缘点(步骤s2623)。作为第二特征点的该边缘点是被配置为计算特征点的第二辅助特征点。
[0247]
接下来,高度图像生成单元202针对多个轮廓数据pd中的各个轮廓数据,基于作为在s2622中提取的辅助特征点的第一特征点和作为在s2623中提取的辅助特征点的第二特征点来计算特征点(步骤s2624)。在特征点的计算中,例如,可以使用第一特征点和第二特征点的平均值,或者可以使用加权平均值。
[0248]
随后,高度图像生成单元202基于根据多个轮廓数据pd中的各个轮廓数据计算出的特征点的x位置来计算基准x位置xr(步骤s2625)。作为基准x位置xr,例如,可以使用多个特征点的x位置的平均值。另外,从x校正基准区域arx中的第一行的轮廓数据pd提取的特征点的x位置可以用作基准x位置xr。
[0249]
接下来,高度图像生成单元202针对多个轮廓数据pd中的各个轮廓数据,计算基准x位置xr与从一个轮廓数据提取的特征点的x位置之间的差(步骤s2626)。这里所计算出的差与一个轮廓数据pd在轮廓对准期间的偏移量相对应。
[0250]
接下来,高度图像生成单元202将多个轮廓数据pd中的各个轮廓数据在x2方向上偏移了在s2626中计算出的偏移量(步骤s2627)。
[0251]
通过s2621至s2627的上述处理,对准轮廓数据。由于以这种方式基于多个辅助特征点来计算特征点,因此即使一个轮廓数据上不存在的点也可以被设置为特征点。因此,无论测量对象的形状如何,都可以校正在轮廓数据pd中生成的振动成分。
[0252]
3.倾斜校正
[0253]
(倾斜校正的概述)
[0254]
图21a和21b是示出倾斜校正的图。由轮廓数据生成单元201生成的在y2方向上具有不同位置的多个轮廓数据pd由图21a所示的pd61、pd62、pd63、pd64和pd65表示。另外,测量对象s的移动方向由虚线箭头指示。
[0255]
在测量对象s在没有振动的情况下在带式输送部c上输送的情况下,各个轮廓数据pd61至pd65的倾斜是恒定的。然而,例如,在轮廓数据pd61的倾斜被限定为作为示例的校正基准角度θr的情况下,轮廓数据pd62和pd65相对于校正基准角度θr具有正倾斜。此外,轮廓数据pd63和pd64相对于校正基准角度θr具有负倾斜。注意,从校正基准角度θr起沿逆时针方向旋转的情况被称为正倾斜,而沿顺时针方向旋转的情况被称为负倾斜,但是这是为了描述的目的,并且本发明不限于此。
[0256]
以这种方式,测量对象s以移动方向作为旋转轴在旋转方向上振动。结果,在轮廓数据pd中发生在旋转方向上的振动,并且倾斜不是恒定的。
[0257]
因此,高度图像生成单元202针对各个轮廓数据pd计算倾斜偏差量diθ,该倾斜偏差量diθ是校正基准角度θr和实际倾斜之间的差。然后,根据所计算出的倾斜偏差量diθ使轮廓数据在旋转方向上偏移。以这种方式,如图21b所示,对准在y2方向上的位置不同的多个轮廓数据pd,以在y2方向上具有相等的倾斜。
[0258]
高度图像生成单元202将以这种方式在旋转方向上偏移的多个轮廓数据pd布置在y2方向上,从而生成表示测量对象s的三维形状的高度图像hi。
[0259]
在本实施例中示出的轮廓数据pd的对准集中在轮廓数据pd中的各个轮廓数据上。在x2-z2平面中限定一个轮廓数据pd。因此,如果x2-z2平面中的校正基准角度θr和一个轮
廓数据pd的倾斜是已知的,则高度图像生成单元202可以将该一个轮廓数据pd的倾斜校正到校正基准角度θr。另外,该处理使各个轮廓数据pd在旋转方向上偏移。
[0260]
在下文中,将利用用户界面具体描述倾斜校正。
[0261]
(倾斜校正设置的用户界面)
[0262]
图22a是示出显示在显示单元400上的对准设置画面1000的用户界面的图。在该对准设置画面1000上,可以进行倾斜对准设置。这里,将主要描述与图13a的不同之处。
[0263]
倾斜校正基准区域arθ被显示为叠加在对准前图像1002a上。另外,在参数设置区域1010中显示用于进行倾斜校正设置的倾斜校正设置区域1300。
[0264]
在倾斜校正设置区域1300中,显示用于切换是否执行倾斜校正的复选框cb805、被配置为进行倾斜校正的详细设置的详细设置按钮1301、用于选择校正基准的校正基准选择栏1302以及用于设置校正基准角度的校正基准角度设置栏1303。
[0265]
校正基准选择栏1302可以采用预先准备有“指定角度”和“跟随第一行”的下拉方法。注意,当校正设置单元206b检测到已经输入到校正基准角度设置栏1303中的角度并将该角度设置为校正基准角度θr时,获得“指定角度”。另外,“跟随第一行”是指高度图像生成单元202识别在倾斜校正基准区域中检测到的第一行的轮廓的倾斜,并将该倾斜设置为校正基准角度θr。
[0266]
另外,当显示控制单元205检测到输入单元300已经选择了详细设置按钮1301时,显示控制单元205在显示单元400的对准设置画面1000上显示倾斜校正详细设置区域1310。
[0267]
图22b是示出倾斜校正详细设置区域1310的示例的图。在倾斜校正详细设置区域1310中,显示用于选择倾斜校正模式的校正模式选择栏1311、用于选择作为校正基准区域ar的倾斜校正基准区域arθ的形状的倾斜校正基准区域选择栏1312、被配置为编辑倾斜校正基准区域arθ的编辑按钮1313、用于选择特征点的计算基准的计算基准选择栏1314、用于设置在x2方向上的移动平均的移动平均设置栏1315、用于选择校正基准的校正基准选择栏1302和用于设置校正基准角度的校正基准角度设置栏1303。注意,可以将第一倾斜校正基准区域arθ1和第二倾斜校正基准区域arθ2设置为倾斜校正基准区域arθ。
[0268]
当检测到点击了详细设置按钮1301时,校正设置单元206b接收校正模式的设置、倾斜校正基准区域arθ、特征点的计算基准、移动平均和校正基准作为校正参数。
[0269]
(校正设置过程和检查用高度图像的生成)
[0270]
图23a和23b是示出倾斜校正中的轮廓对准过程的流程图。图23a示出在校正基准选择栏1302中选择了“指定角度”的情况下的轮廓对准过程,并且图23b示出在校正基准选择栏1302中选择了“跟随第一行”的情况下的轮廓对准过程。注意,对准设置和检查用高度图像的生成分别与图14a和14b中的对准设置和检查用高度图像的生成相同,因此省略。
[0271]
首先,将参考图23a的流程图描述轮廓数据pd与在校正基准角度设置栏1303中设置的校正基准角度θr对准的情况。
[0272]
高度图像生成单元202从校正设置单元206b获取校正基准角度θr(步骤s2901a)。
[0273]
接下来,高度图像生成单元202针对从轮廓数据生成单元201获取的多个轮廓数据pd中的各个轮廓数据,识别存在于倾斜校正基准区域arθ中的轮廓数据pd(步骤s2902a)。
[0274]
接下来,高度图像生成单元202针对多个轮廓数据pd中的各个轮廓数据,计算在s2902a中识别的倾斜校正基准区域arθ中的各个轮廓数据pd的倾斜值(步骤s2903a)。
[0275]
随后,高度图像生成单元202针对多个轮廓数据pd中的各个轮廓数据,计算轮廓数据pd的倾斜值与在s2901a中获取的校正基准角度θr之间的差,作为倾斜校正量diθ(步骤s2904a)。
[0276]
接下来,高度图像生成单元202针对多个轮廓数据pd中的各个轮廓数据,在旋转方向上使轮廓数据pd偏移了倾斜校正量diθ,使得一个轮廓数据pd的倾斜变为校正基准角度θr(步骤s2905a)。
[0277]
通过s2901a至s2905a的上述处理,使轮廓数据pd在旋转方向上偏移,使得旋转方向上的倾斜偏差被对准。
[0278]
接下来,将参考图23b的流程图描述各个轮廓数据pd的倾斜与倾斜校正基准区域arθ中的第一行的倾斜对准的情况。
[0279]
高度图像生成单元202针对从轮廓数据生成单元201获取的多个轮廓数据pd中的各个轮廓数据,识别存在于倾斜校正基准区域arθ中的轮廓数据(步骤s2901b)。
[0280]
接下来,高度图像生成单元202识别存在于倾斜校正基准区域arθ中的第一行的轮廓数据pd,并且计算轮廓数据pd的倾斜值(步骤s2902b)。然后,高度图像生成单元202在校正设置单元206b中将在s2902b中获取的倾斜值设置为校正基准角度θr(步骤s2903b)。
[0281]
接下来,高度图像生成单元202针对多个轮廓数据pd中的各个轮廓数据,计算在s2901b中提取的倾斜校正基准区域arθ中的轮廓数据pd的倾斜值(步骤s2904b)。
[0282]
随后,高度图像生成单元202针对多个轮廓数据pd中的各个轮廓数据,计算一个轮廓数据pd的倾斜值与在s2903b中获取的校正基准角度θr之间的差,作为倾斜校正量diθ(步骤s2905b)。
[0283]
接下来,高度图像生成单元202针对多个轮廓数据pd中的各个轮廓数据,使轮廓数据pd在旋转方向上偏移了倾斜校正量diθ,使得该一个轮廓数据pd的倾斜变为校正基准角度θr(步骤s2906b)。
[0284]
通过s2901b至s2906b的上述处理,使轮廓数据pd在旋转方向上偏移,并且在旋转方向上的倾斜偏差被对准。
[0285]
以这种方式,当各个轮廓数据pd的倾斜与倾斜校正基准区域arθ中的第一行的倾斜对准时,校正基准角度θr对于各个测量对象是不同的。在这种情况下,高度图像生成单元202可以根据测量对象s的一个轮廓数据pd的倾斜来针对各个测量对象s动态地改变校正基准角度θr。
[0286]
(旋转方向上的偏移)
[0287]
这里,将描述轮廓数据pd的旋转方向上的偏移。注意,为了便于描述,假设校正基准角度θr被设置为0度。也就是说,假设各个轮廓数据pd被对准,以去除在各个轮廓数据pd中生成的ab倾斜。
[0288]
将描述在图22b的校正模式选择栏1311中选择了“高速”的情况。在这种情况下,为了高速实现轮廓数据pd的偏移处理,高度图像生成单元202在不校正各个轮廓数据pd在x2方向上的位置的情况下,校正在z2方向上的位置。也就是说,高度图像生成单元202将从校正基准角度θr在正方向上旋转了diθ的校正前轮廓数据在z2方向上的位置投影在具有校正基准角度θr的倾斜的直线上,从而获取校正之后的轮廓数据。通过将z2方向上的位置投影在校正基准角度θr的直线上的这种对倾斜偏差的校正被称为高速模式下的在旋转方向上
的偏移。
[0289]
接下来,将描述在图22b中的校正模式选择栏1311中选择了“高准确度”的情况。在这种情况下,轮廓数据pd的各个点根据倾斜校正量diθ而旋转,从而以高准确度实现轮廓数据pd的偏移处理。也就是说,从校正基准角度θr起在正方向上旋转了diθ的校正前轮廓数据的各个点的位置在负方向上旋转了diθ,从而获取校正后轮廓数据。以这种方式通过根据倾斜校正量diθ来旋转轮廓的对倾斜偏差的这种校正被称为高准确度模式下的在旋转方向上的偏移。
[0290]
4.变形例
[0291]
(特征点的估计)
[0292]
这里,作为示例,将描述用于从通过利用摄像头部100拍摄具有v形凹槽的测量对象s的图像而获得的轮廓数据pd估计特征点的方法。如z失准校正和x失准校正中所述,校正设置单元206b可以接收校正基准区域ar的设置以包括v形凹槽部分,并且高度图像生成单元202可以提取校正基准区域ar中的底点作为特征点。
[0293]
然而,存在在摄像头部100中难以测量凹槽部分的情况,诸如v形凹槽部分被焊接或钎焊的情况等。即使在这种情况下,高度图像生成单元202也可以通过使用将在本实施例中描述的特征点估计函数来使轮廓数据pd偏移,以使v形凹槽部分在y2方向上沿直线对准。
[0294]
首先,将描述对准设置。在显示单元400上所显示的设置期间的高度图像hi上,校正设置单元206b接收在y2方向上延伸的第一校正基准区域ar1和在y2方向上延伸的第二校正基准区域ar2的设置,作为校正基准区域ar。另外,校正设置单元206b接收特征点提取方法的设置。作为特征点提取方法,校正设置单元206b可以接收例如直线和直线之间的交点或圆和直线之间的交点的选择。在下文中,将描述校正设置单元206b提取直线和直线的交点作为特征点的情况。
[0295]
接下来,将描述特征点估计。高度图像生成单元202针对由轮廓数据生成单元201生成的各个轮廓数据pd,识别第一校正基准区域ar1中的轮廓数据pd和第二校正基准区域ar2中的轮廓数据pd。然后,高度图像生成单元202通过诸如最小二乘法等的已知近似方法来计算存在于第一校正基准区域ar1中的轮廓数据pd的近似直线。另外,高度图像生成单元202针对存在于第二校正基准区域ar2中的轮廓数据pd同样地计算近似直线。此外,高度图像生成单元202计算从第一校正基准区域ar1计算出的近似直线与从第二校正基准区域ar2计算出的近似直线之间的交点,并将该交点设置为特征点。
[0296]
高度图像生成单元202将z失准校正和x失准校正应用于针对在y2方向上的位置不同的多个轮廓数据pd中的各个轮廓数据所计算出的特征点。也就是说,高度图像生成单元202从多个特征点计算基准z高度zr与基准x位置xr中的至少一个,并且根据作为一个轮廓数据pd的特征点与基准z高度zr之间的差的z位移量以及作为该一个轮廓数据pd的特征点与基准x位置xr之间的差的x位移量中的至少一个,来使该一个轮廓数据pd偏移。结果,在z2方向和x2方向中的至少一个方向上的位移被去除,并且获得特征点在y2方向上对准成一行的轮廓数据pd。
[0297]
(偏心偏差校正)
[0298]
当测量对象s在旋转台上旋转地移动时,在各个轮廓数据pd中发生偏心偏差。轮廓数据pd的上述对准可以校正该偏心偏差。
[0299]
当测量对象s置于测量对象s的中心偏离旋转台的旋转中心的状态时,测量对象s看起来根据旋转台的旋转相对于摄像头部100在x2方向上振动。因此,即使高度图像生成单元202在y2方向上接合由轮廓数据生成单元201生成的轮廓数据pd,轮廓数据pd也不在y2方向上沿直线对准。即使在这种应用的情况下,也可以应用上述z失准校正和x失准校正。
[0300]
校正设置单元206b以与上述z失准校正和x失准校正相同的方式在显示单元400上所显示的设置期间的高度图像上接收在y2方向上延伸的校正基准区域ar的设置。校正参数与z失准校正和x失准校正的校正参数相同,并且因此被省略。
[0301]
接下来,高度图像生成单元202根据预设的校正参数从在y2方向上延伸的校正基准区域ar中的轮廓数据pd计算特征点。
[0302]
然后,高度图像生成单元202将z失准校正和x失准校正应用于针对在y2方向上的位置不同的多个轮廓数据pd中的各个轮廓数据所计算出的特征点。也就是说,高度图像生成单元202从多个特征点计算基准z高度zr和基准x位置xr中的至少一个。然后,高度图像生成单元202根据作为一个轮廓数据pd的特征点的z高度与基准z高度zr之间的差的z位移量以及作为该一个轮廓数据pd的特征点的x位置与基准x位置xr之间的差的x位移量中的至少一个,来使该一个轮廓数据pd偏移。结果,校正了在z2方向和x2方向中的至少一个方向上的位移。
[0303]
(模板拟合)
[0304]
接下来,将描述各个轮廓数据pd与预先登记的模板对准的情况。
[0305]
作为示例,假设测量对象s具有组合弧和直线的外边缘。在这种情况下,即使使轮廓数据pd偏移使得从各个轮廓数据pd提取的特征点的z高度变为基准z高度zr或者该特征点的x位置变为基准x位置xr,也难以获得表示测量对象s的准确形状的高度图像数据hi。
[0306]
因此,校正设置单元206b接收基于预先登记的模板的校正基准的设置。然后,高度图像生成单元202使轮廓数据pd偏移,使得从轮廓数据pd提取的特征点变为基于模板所设置的校正基准。以这种方式,即使在特征点未沿直线对准的测量对象s的情况下,高度图像生成单元202也可以生成去除了测量对象s的振动和位移的高度图像hi。
[0307]
(模板拟合的校正设置)
[0308]
在本实施例的轮廓对准中,校正设置单元206b预先接收模板的登记作为校正基准。将描述模板登记方法。
[0309]
(使用高度图像的模板登记)
[0310]
对于模板登记,例如,使用由高度图像生成单元在设置期间生成的高度图像hi。将参考图24a的流程图描述这种情况。注意,本文将主要描述与图14a的流程图的不同之处。
[0311]
在步骤s3506中,显示控制单元205检测由用户进行的输入单元300的操作,在显示单元400上显示在y2方向上延伸的校正基准区域ar,并且设置由用户在校正设置单元206b中设置的校正基准区域ar。注意,在显示单元400上显示校正基准区域ar不是必需的。例如,可以接收两个坐标的输入以设置校正基准区域ar,其中所接收的坐标被设置为矩形的对角线。
[0312]
接下来,在步骤s3507中,高度图像生成单元202识别在设置单元中设置的校正基准区域ar中所包括的轮廓数据pd,并且分别提取多个轮廓数据pd的特征点。
[0313]
然后,在步骤s3508中,高度图像生成单元202在校正设置单元206b中将在s3507中
由高度图像生成单元202提取的各个特征点设置为作为校正基准的理想特征点。注意,高度图像生成单元202可以在校正设置单元206b中将已经提取特征点的轮廓数据pd的位置和作为校正基准的理想特征点彼此相关联地设置。也就是说,针对在y2方向上的位置不同的多个轮廓数据pd中的各个轮廓数据,高度图像生成单元202可以在校正设置单元206b中将一个轮廓数据pd在y2方向上的位置以及该一个轮廓数据pd的理想特征点的x位置和/或z高度彼此相关联地设置。轮廓数据pd在y2方向上的位置可以被存储为指示已经从轮廓数据生成单元201生成轮廓数据pd的编号的行号。
[0314]
通过s3501至s3508的上述处理完成对准设置。注意,可以用夹具(jig)等精确地定位测量对象s,使得在对准设置期间不向测量对象s施加振动。
[0315]
(使用cad模型的模板登记)
[0316]
尽管图24a的流程图示出使用通过实际对测量对象s进行测量而获得的高度图像数据hi来登记模板的过程,但是也可以使用cad模型来登记模板。接下来将描述其示例。
[0317]
显示控制单元205使显示单元400显示通过输入单元300的操作而选择的一个cad模型。对显示在显示单元400上的cad模型执行图24a中的s3506至s3508的处理。也就是说,高度图像生成单元202从cad模型提取特征点。然后,高度图像生成单元202可以在校正设置单元206b中将所提取的各个特征点设置为作为校正基准的理想特征点。
[0318]
尽管在以上描述中已经主要描述了基于从高度图像hi或cad数据作为特征点提取的边缘点的x位置来对准轮廓数据pd的情况,但是高度图像生成单元202可以代替特征点的x位置或者除了特征点的x位置之外还基于z高度来对准轮廓数据pd。
[0319]
将描述高度图像生成单元202基于特征点的z高度来使轮廓数据pd偏移的情况。在图24a的s3507中,高度图像生成单元202识别包括在校正基准区域ar中的轮廓数据pd。然后,高度图像生成单元202分别根据针对多个轮廓数据pd预先设置的校正参数来提取特征点。然后,在s3508中,高度图像生成单元202在校正设置单元206b中将在s3507中提取的特征点的各个z高度设置为校正基准。
[0320]
接下来,根据图14b的流程图生成检查用高度图像。
[0321]
接下来,将参考图24b的流程图描述图14b的s2014中所示的轮廓对准。
[0322]
首先,高度图像生成单元202针对从轮廓数据生成单元201获取的多个轮廓数据pd中的各个轮廓数据,识别存在于校正基准区域ar中的轮廓数据pd(步骤s3521)。
[0323]
接下来,高度图像生成单元202针对多个轮廓数据pd中的各个轮廓数据,从在s3521中提取的校正基准区域ar中的轮廓数据pd提取特征点,并且计算特征点的x位置和z高度中的至少一个(步骤s3522)。
[0324]
随后,高度图像生成单元202针对多个轮廓数据pd中的各个轮廓数据,计算从一个轮廓数据pd计算出的特征点的x位置和/或z高度与作为与该一个轮廓数据pd相对应的校正基准的理想特征点之间的差(步骤s3523)。高度图像生成单元202可以通过在设置期间轮廓数据pd的行号和在操作期间轮廓数据pd的行号,来识别与该一个轮廓数据相对应的作为校正基准的理想特征点。也就是说,高度图像生成单元202可以针对在操作期间首先获得的轮廓数据pd,使用存储在校正设置单元206b中的行号为1的校正基准。
[0325]
然后,高度图像生成单元202使多个轮廓数据pd中的各个轮廓数据在x2方向和z2方向中的至少一个方向上偏移了在s3523中计算出的偏移量(步骤s3524)。
[0326]
(校正量存储功能)
[0327]
在上面的描述中,已经描述了如下的情况:在操作期间针对各个轮廓数据pd,计算轮廓数据pd的特征点与基准x位置xr、基准z高度zr或校正基准之间的差,并且根据所计算出的差来使该轮廓数据pd偏移。这里,将描述当预先确定偏移量(校正量)时各个轮廓数据pd被校正了预定偏移量的情况。
[0328]
存在这样的情况:当通过利用连接到诸如机器人控制单元和plc等的控制装置的机器人夹持测量对象s来输送测量对象s时,或者当通过利用机器人夹持摄像头部100来移动测量对象s时,添加到各个轮廓数据pd的振动成分具有再现性。在这种情况下,高度图像生成单元202可以使用校正量存储功能以高速实现轮廓数据pd的对准处理。
[0329]
高度图像生成单元202预先计算多个轮廓数据pd中的各个轮廓数据的偏移量(校正量)。然后,高度图像生成单元202可以在操作期间应用预先计算出的偏移量作为轮廓数据pd的偏移量。
[0330]
将根据图25a的流程图描述轮廓对准设置方法。s3601至s3607与图14a中的s2001至s2007相同,因此被省略。
[0331]
高度图像生成单元202识别在s3607中设置的校正基准区域ar中所包括的轮廓数据pd(步骤s3608)。
[0332]
然后,高度图像生成单元202针对在y2方向上的位置不同的多个轮廓数据pd中的各个廓数据,提取在s3608中识别的校正基准区域ar中的轮廓数据pd的特征点(步骤s3609)。
[0333]
接下来,高度图像生成单元202根据在s3609中提取的多个特征点来计算校正基准(步骤s3610)。为了计算校正基准,可以使用多个特征点的平均或最小二乘法等。
[0334]
接下来,高度图像生成单元202针对在y2方向上的位置不同的多个轮廓数据pd中的各个轮廓数据,计算在s3609中提取的特征点与在s3610中计算出的校正基准之间的差作为偏移量(步骤s3611)。
[0335]
然后,高度图像生成单元202针对在y2方向上的位置不同的多个轮廓数据pd中的各个轮廓数据,将在s3611中计算出的偏移量与轮廓数据pd在y2方向上的位置相关联地存储在校正设置单元206b中(步骤s3612)。轮廓数据pd在y2方向上的位置可以被存储为指示已经从轮廓数据生成单元201生成轮廓数据pd的编号的行号。
[0336]
接下来,根据图14b的流程图生成检查用高度图像。
[0337]
随后,将参考图25b的流程图描述图14b的s2014中所示的轮廓对准方法。
[0338]
首先,高度图像生成单元202针对从轮廓数据生成单元201获取的一个轮廓数据pd,识别存在于校正基准区域ar中的轮廓数据pd(步骤s3631)。
[0339]
接下来,高度图像生成单元202识别在s3631中提取的校正基准区域ar中的轮廓数据pd在y2方向上的位置(步骤s3632)。高度图像生成单元202可以基于在设置期间轮廓数据pd的行号和在操作期间轮廓数据pd的行号来识别轮廓数据pd在y2方向上的位置。
[0340]
随后,高度图像生成单元202从校正设置单元206b获取与在s3632中识别的在y2方向上的位置相对应的偏移量(步骤s3633)。当高度图像生成单元202基于行号来识别轮廓数据pd在y2方向上的位置时,存储在校正设置单元206b中的行号为1的轮廓数据pd的偏移量可以用作在操作期间首先获得的轮廓数据pd的偏移量。
[0341]
然后,高度图像生成单元202使该一个轮廓数据pd仅偏移了在s3633中获取的偏移量(步骤s3634)。
[0342]
然后,高度图像生成单元202判断下一轮廓数据pd是否存在于校正基准区域ar中(步骤s3635),并且当下一轮廓数据pd存在时,重复s3631至s3634的处理。当下一轮廓数据不存在时,即,当针对校正基准区域ar中的所有轮廓数据pd完成轮廓数据pd的偏移时,轮廓对准结束。
[0343]
通过s3631至s3635的上述处理,对准轮廓。
[0344]
(倾斜维持功能)
[0345]
尽管在以上描述中已经主要描述了在基准x位置xr和基准z高度zr的计算中使用多个特征点的平均值的情况,但是本实施例不限于此。作为示例,将参考图26描述测量对象s在相对于摄像头部100倾斜期间被扫描的情况。另外,假设高度图像生成单元202提取边缘点作为特征点。在这种情况下,当在y2方向的正方向上扫描测量对象s时,由高度图像生成单元202提取为特征点的边缘点的x位置在x2方向的正方向上改变。
[0346]
(x失准校正中的倾斜维持功能)
[0347]
高度图像生成单元202从校正基准区域ar中的多个轮廓数据pd中提取边缘点作为特征点。然后,高度图像生成单元202通过诸如最小二乘法等的已知近似方法从所提取的多个边缘点计算边缘点的近似直线。当这里计算出的近似直线用作基准x位置xr时,高度图像生成单元202可以在维持测量对象s的倾斜的同时执行轮廓对准。在这种情况下,边缘点沿着图26所示的直线lθ对准。
[0348]
注意,也可以在不使用这种倾斜维持功能的情况下执行轮廓对准。在这种情况下,可以从所提取的多个边缘点计算在y2方向上具有零倾斜的直线。在这种情况下,在y2方向上具有零倾斜的直线lθ可以用作基准x位置xr。
[0349]
(z失准校正中的倾斜维持功能)
[0350]
高度图像生成单元202基于预先设置为校正参数的高度类型从校正基准区域ar中的多个轮廓数据pd提取特征点。这里,假设选择“底”作为高度类型,该作高度类型是校正参数之一,并且高度图像生成单元202提取底点作为特征点。高度图像生成单元202通过诸如最小二乘法等的已知近似方法从所提取的多个特征点计算底点的近似直线。当这里所计算出的近似直线用作基准z高度zr时,可以在维持测量对象s的倾斜的同时执行轮廓对准。
[0351]
注意,也可以在不使用这种倾斜维持功能的情况下执行轮廓对准。在这种情况下,可以从所提取的多个底点计算在y2方向上具有零倾斜的直线。这里所计算出的在y2方向上具有零倾斜的直线可以用作基准z高度zr。
[0352]
(异常点去除功能)
[0353]
尽管基准x位置xr和基准z高度zr与特征点之间的差在以上描述中被限定为偏移量,但是本实施例不限于此。作为示例,在由高度图像生成单元202针对一个特征点计算出的偏移量偏离预定阈值的情况下,高度图像生成单元202可以将该一个特征点视为异常点,并且根据在前和在后的特征点的偏移量对该偏移量进行插值。
[0354]
为了实现这种异常点去除功能,例如,可以在校正设置单元206b中预先设置用于判断是否是异常点的阈值作为校正参数。该阈值是x失准校正的情况下的在x2方向上的阈值,并且是z失准校正的情况下的在z2方向上的阈值。当执行x失准校正和z失准校正这两者
时,可以设置在x2方向上的阈值和在z2方向上的阈值这两者。
[0355]
当检测到在校正设置单元206b中设置有阈值时,高度图像生成单元202判断针对一个特征点计算出的偏移量是否偏离了在校正设置单元206b中设置的阈值或更多。然后,当检测到偏差等于或大于阈值时,高度图像生成单元202基于该一个特征点之前和之后的特征点的偏移量来对该一个特征点的偏移量进行插值。注意,在这种情况下,高度图像生成单元202可以基于紧接在该一个特征点之前或之后的特征点的偏移量来计算插值的偏移量,并且高度图像生成单元202可以使用诸如多个特征点的偏移量的平均、内分和外分等的数学方法来计算插值的偏移量。
[0356]
此外,在偏移量偏离了阈值或更多而形成集群的多个特征点的情况下,高度图像生成单元202可以在不将集群中所包括的特征点视为异常点的情况下基于偏离了阈值或更多的偏移量来使轮廓数据pd偏移。
[0357]
注意,在旋转方向上的阈值可以进一步设置为上述阈值。在这种情况下,可以限制上述倾斜校正的校正量。
[0358]
(基准面的估计)
[0359]
尽管在上述描述中根据在高度图像上设置的校正基准区域ar计算基准x位置xr和基准z高度zr,但是本实施例不限于此。作为示例,将描述测量对象s在设置有规则三维图案的基准面rs上移动的情况。在这种情况下,可以基于三维图案的规则性来计算基准x位置xr和基准z高度zr中的至少一个。
[0360]
图27a是从x2方向观察的设置有规则三维图案的基准面rs的图。基准面rs是通过在y2方向上对准重复单元ru而形成的。
[0361]
图27b是示出测量对象s在基准面rs上在移动方向a上移动的图。测量对象s尚未流到重复单元ru1和ru2上,并且测量对象s正在重复单元ru3的后侧上流动。测量对象的移动方向是如箭头a所示的y2方向的正方向。
[0362]
高度图像生成单元202基于基准面rs的多个轮廓数据来检测具有重复单元ru的规则性的基准面rs。然后,高度图像生成单元202在校正设置单元206b中将基准面rs的高度rh设置为基准高度zr。此后,高度图像生成单元202基于偏移量使轮廓数据pd在z2方向上偏移,该偏移量是从一个轮廓数据提取的特征点的z高度与基准z高度之间的差。然后,高度图像生成单元202可以通过在y2方向上布置在z方向上偏移的轮廓数据pd来获得指示测量对象s的形状的高度图像hi。
[0363]
(多个类型的校正的组合)
[0364]
尽管在上面的描述中主要描述了轮廓数据pd在z2方向上偏移的情况和轮廓数据pd在x2方向上偏移的情况,但是本实施例不限于此。高度图像生成单元202可以使轮廓数据pd在z2方向和x2方向上偏移,并且还可以使轮廓数据pd在旋转方向上偏移。
[0365]
在轮廓数据pd以这种方式在多个方向上偏移的情况下,第二方向上的校正基准区域ar2可以跟随从第一方向上的校正基准区域ar1计算出的校正基准。也就是说,可以将第一方向上的校正基准区域ar1设置在相对于高度图像hi的固定坐标系中,并且可以将第二方向上的校正基准区域ar2设置在以测量对象作为基准的相对坐标系中。
[0366]
图28的上部上的图示出将x失准校正和z失准校正顺次应用于对准前高度图像的情况。另外,第一方向上的校正基准区域ar1与x校正基准区域arx相对应,并且第二方向上
的校正基准区域ar2与z校正基准区域arz相对应。也就是说,高度图像生成单元202从校正设置单元206b获取x校正基准区域arx,并且从对准前高度图像提取作为特征点的边缘点。高度图像生成单元202根据作为特征点的所提取的边缘点来计算基准x位置xr。然后,高度图像生成单元202使轮廓数据pd在x2方向上偏移,使得特征点的x位置在y2方向上沿直线对准,以生成x校正高度图像。
[0367]
接下来,高度图像生成单元202从校正设置单元206b获取z校正基准区域arz,并且从轮廓数据pd在x2方向上偏移的x校正高度图像提取特征点。这里的特征点根据诸如峰点和底点等的预设校正参数来提取。然后,高度图像生成单元202根据所提取的特征点计算z校正基准zr。此后,高度图像生成单元202使轮廓数据pd在z2方向上偏移,使得特征点的z高度在y2方向上沿直线对准,以生成检查用高度图像。
[0368]
图28的中部上的图示出测量对象s在x2方向上的位置与图28的上部所示的情况相比改变并由摄像头部100拍摄的情况。
[0369]
在这种情况下,x校正基准区域arx设置在相对于高度图像hi的固定坐标系中,但是设置在相对于测量对象s的相对宽的范围中。因此,高度图像生成单元202可以与图28的上部所示的情况同样的方式,提取作为边缘点的特征点,基于边缘点使轮廓数据在x2方向上偏移,并且生成x校正高度图像。
[0370]
另一方面,z校正基准区域arz也被设置在相对于高度图像hi的固定坐标系中。在这种情况下,如图28的中部的高度图像hi22所示,随着测量对象s的位置改变,z校正基准区域arz相对于测量对象s的相对位置从图28的上部中的高度图像hi12改变,并且偏离测量对象s。结果,高度图像生成单元202从z校正基准区域arz提取错误特征点。然后,高度图像生成单元202生成如图28的中部中的高度图像hi23所示的保持z2方向上的位移的高度图像。注意,为了描述起见,这里已经例示了z校正基准区域arz在测量对象之外的情况,至少当相对于图28的上部所示的情况存在变化时,可能提取错误特征点。
[0371]
为了防止以这种方式生成保持位移的高度图像,作为第二方向上的校正基准区域ar的z校正基准区域arz可以跟随作为第一方向上的校正基准区域ar1的x校正基准区域arx。也就是说,可以将第二方向上的校正基准区域ar2设置在以测量对象s作为基准的相对坐标系中。在图28的下部中示出以这种方式在以测量对象s作为基准的相对坐标系中设置第二方向上的校正基准区域ar2的情况。
[0372]
与图28的中部相同地,图28的下部上的图示出在x2方向上发生位置变化的测量对象s。与图28的中部的情况相同地,高度图像生成单元202提取作为边缘点的特征点,基于边缘点计算基准x位置xr,使轮廓数据在x2方向上偏移,并且生成x校正高度图像。
[0373]
接下来,高度图像生成单元202在基准x位置xr之后设置z校正基准区域arz,该z校正基准区域arz是第二方向上的校正基准区域ar2。也就是说,校正设置单元206b在设置期间接收基于测量对象s的相对坐标系中的z校正基准区域arz的设置。在图28的下部的情况下,校正设置单元206b可以接收相对于基准x位置xr的+rx1至+rx2的范围作为z校正基准区域arz的x2方向上的范围。可替代地,校正设置单元206b可以基于包括在x校正高度图像中的测量对象s的位置接收z校正基准区域arz的设置作为相对于测量对象s的相对位置。结果,即使当测量对象s在x2方向上的位置被改变并由摄像头部100拍摄时,z校正基准区域arz相对于测量对象s的相对位置也维持恒定。结果,高度图像生成单元202可以更准确地对
准轮廓数据pd。
[0374]
在图28的下部中的高度图像hi33中示出在第二方向上的校正基准区域ar2被设置为跟随从第一方向上的校正基准区域ar1计算出的校正基准或测量对象s的情况下的对准结果。与图28的上部中的高度图像hi13相同地,在图28的下部中的高度图像hi33中去除了在x2方向和z2方向上的位移。
[0375]
尽管在上述描述中在应用x失准校正之后应用z失准校正,但是高度图像生成单元202可以组合旋转校正以执行轮廓数据pd的对准,或者可以改变对准顺序。可以改变对准顺序,使得在应用z失准校正之后应用x失准校正。
[0376]
例如,在相同圆柱形状在特定方向上延伸的线缆用作测量对象s的情况下,可以按照子体的顺序应用z失准校正和x失准校正。在这种情况下,第一方向上的校正基准区域ar1与z校正基准区域arz相对应,并且第二方向上的校正基准区域ar2与x校正基准区域arx相对应。另外,根据第一方向上的校正基准区域ar1计算出的校正基准与基准z高度zr相对应,并且通过使轮廓数据pd在作为第一方向的z2方向上偏移而获得的高度图像变为z校正高度图像。
[0377]
首先,高度图像生成单元202从预设的z校正基准区域arz提取特征点。在该示例中,提取峰点作为特征点。然后,高度图像生成单元202根据作为特征点被提取的多个峰点来计算基准z高度zr。此后,高度图像生成单元202使轮廓数据pd在z2方向上偏移,使得特征点的z高度在y2方向上沿直线对准,以生成z校正高度图像。
[0378]
接下来,高度图像生成单元202将x校正基准区域arx设置在相对于z基准高度zr的预定高度区域(诸如相对于基准z高度zr的-rz的高度区域等)中,并且提取x校正基准区域arx中的边缘点。也就是说,可以基于基准z高度zr将x校正基准区域arx设置为相对于测量对象s的相对位置。然后,高度图像生成单元202基于所提取的边缘点计算轮廓数据pd的基准x位置xr。此后,高度图像生成单元202根据边缘点的x位置和基准x位置xr之间的差,使轮廓数据pd在x2方向上偏移。结果,无论利用摄像头部100拍摄作为测量对象s的线缆的高度如何,都提取适当的边缘点。
[0379]
(校正基准区域ar的跟随)
[0380]
在以上描述中已经描述了在由高度图像生成单元202生成的高度图像上相对于测量对象s来设置校正基准区域ar。校正基准区域ar可以以相对于测量对象s的相对位置关系来设置。
[0381]
具体地,校正设置单元206b接收校正基准区域ar的指定作为相对于测量对象s的相对位置。
[0382]
然后,高度图像生成单元202获取在校正设置单元206b中设置的校正基准区域ar。
[0383]
接下来,高度图像生成单元202从在操作期间获得的高度图像hi识别测量对象s的位置。可以使用例如高度图像hi的图案分析、外形轮廓信息和灰度变化信息等来识别测量对象s的位置。
[0384]
然后,高度图像生成单元202基于所识别的测量对象s的位置来设置校正基准区域ar。
[0385]
结果,可以在无需预先调整测量对象s的方向的情况下,针对在带式输送部c上在各个方向上流动的测量对象s准确地设置校正基准区域ar。
[0386]
(自动对准功能)
[0387]
尽管在以上描述中已经描述了预先设置校正基准区域ar的情况,但是可以省略该过程。将描述在不设置校正基准区域ar的情况下自动进行轮廓对准的情况。
[0388]
高度图像生成单元202使由轮廓数据生成单元201生成的多个轮廓数据pd中的各个轮廓数据偏移,以减小多个轮廓数据pd之间的差。
[0389]
具体地,高度图像生成单元202将要进行校正量计算的基准轮廓数据与用于计算校正量的参照轮廓数据进行比较,以在多次移动轮廓数据的同时计算差。
[0390]
首先,高度图像生成单元202将基准轮廓数据在x2方向上移动了第一量。在这种状态下,高度图像生成单元202针对基准轮廓数据的各个x坐标计算与参照轮廓数据的差。然后,高度图像生成单元202获得针对各个x坐标所计算出的差的平均值或总值。
[0391]
接下来,高度图像生成单元202将基准轮廓数据在x2方向上移动了第二量。即使在这种状态下,高度图像生成单元202也针对基准轮廓数据的各个x坐标计算与参照轮廓数据的差,并且获得针对各个x坐标所计算出的差的平均值或总值。
[0392]
高度图像生成单元202通过重复基准轮廓数据的移动来计算多个平均值或总值。然后,高度图像生成单元202可以计算所计算出的值变小的移动量作为在x2方向上的校正量。
[0393]
注意,紧接在基准轮廓数据之前或之后的轮廓数据可以用作参照轮廓数据。也就是说,针对各个轮廓数据计算校正量,以减少一个轮廓数据相对于在前或在后的轮廓数据的位移。
[0394]
这里,已经描述了通过在x2方向上多次移动轮廓数据来计算校正量的方法,但是高度图像生成单元202也可以以相同的方式计算在z2方向上的偏移量和在旋转方向上的校正量。
[0395]
也就是说,高度图像生成单元202移动基准轮廓数据以获得与参照轮廓数据的一致度。然后,高度图像生成单元202计算校正量以增加基准轮廓数据和参照轮廓数据之间的一致度,并且基于校正量移动基准轮廓数据。
[0396]
结果,用户没有必要进行初步设置,并且可以通过校正多个轮廓数据pd中的各个轮廓数据来进行轮廓数据pd之间的对准,以减小轮廓数据之间的差。
[0397]
[2]第二实施例
[0398]
将描述根据本发明的第二实施例的形状检查装置500与根据第一实施例的形状检查装置500之间的差异。图29是示出根据第二实施例的形状检查装置500的控制单元220的配置的框图。如图29所示,除了第一实施例中所包括的功能单元之外,控制单元220还包括亮度图像生成单元207作为功能单元。控制单元220接收根据第二实施例的轮廓对准设置。下面将描述根据第二实施例的轮廓对准设置。
[0399]
轮廓数据生成单元201基于从光接收单元121输出的光接收信号,生成与移动的测量对象s在y2方向上的各个位置相对应的轮廓数据pd。另外,轮廓数据生成单元201还可以将所生成的轮廓数据pd输出到亮度图像生成单元207。
[0400]
亮度图像生成单元207在y2方向上布置由轮廓数据生成单元201生成的多个轮廓数据pd,以生成测量对象s的亮度图像ii。由于已经参考图6至7b描述了亮度图像ii,因此省略了其细节,但是通过在y2方向上布置分别与由位置xi和yj限定的点相关联的峰亮度值
iij来生成亮度图像ii。
[0401]
在根据第二实施例的轮廓对准中,校正设置单元206b在亮度图像ii上而不是高度图像hi上接收校正基准区域ar的设置。在检查具有不同颜色的测量对象s的情况下,可以使用以这种方式使用亮度图像ii的对准设置。将参考图15a和15b描述使用亮度图像ii的对准设置。
[0402]
在使用高度图像hi的对准设置中,校正设置单元206b接收高度的指定作为边缘水平,该边缘水平是校正参数之一。在使用亮度图像ii的对准设置中,校正设置单元206b在边缘选择栏1202中接收亮度图像的选择作为边缘提取对象。另外,校正设置单元206b在边缘水平设置栏1203中接收亮度值(代替高度)的指定作为边缘水平。
[0403]
高度图像生成单元202从校正设置单元206b获取被设置为边缘水平的亮度值。另外,高度图像生成单元202获取由亮度图像生成单元207生成的亮度图像ii。然后,高度图像生成单元202基于从校正设置单元206b获取的亮度值从亮度图像ii提取特征点。当由高度图像生成单元202针对构成亮度图像ii的多个轮廓数据pd提取特征点时,高度图像生成单元202基于多个特征点来计算作为校正基准的基准x位置xr。然后,高度图像生成单元202根据作为基准x位置xr和特征点的x位置之间的差的偏移量,来使各个轮廓数据pd偏移。然后,高度图像生成单元202在y2方向上布置轮廓数据pd以生成检查用高度图像,在该高度图像中减小了在y2方向上的位置不同的多个轮廓数据pd之间的位移。
[0404]
上述实施例在所有方面仅仅是示例,并且不应被解释为限制。此外,属于权利要求书的等同范围的所有修改和改变都落入本方面的范围内。
[0405]
如上所述,例如,在检查由带式输送部等以恒定速度移动的测量对象的形状的情况下,可以使用本发明。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1