一种用于条纹投影三维测量的伽马非线性误差矫正方法
本发明属于三维测量,具体地说,本发明涉及一种用于条纹投影三维测量的伽马非线性误差矫正方法。
背景技术:
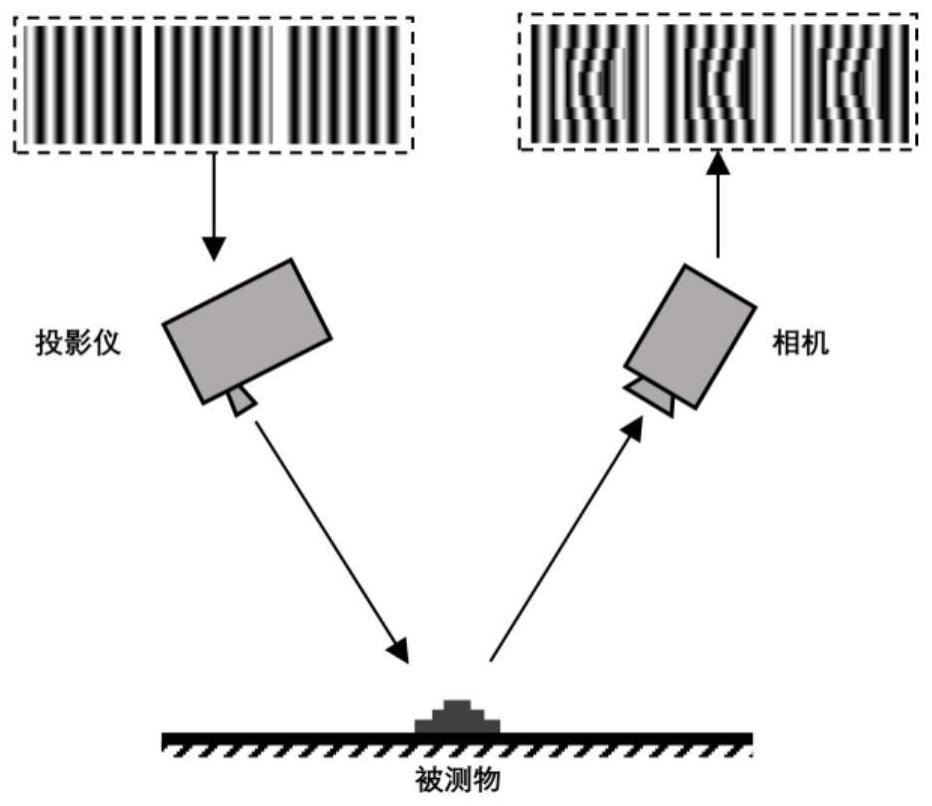
1、基于结构光技术的条纹投影三维测量方法具有非接触、精度高、速度快等优点,已广泛应用于各个领域,如工业检测、逆向工程、虚拟现实、人体建模、文物保护等。条纹投影三维测量方法通过投影仪将一组编码条纹图案投射到被测物体表面上,然后再利用摄像机捕获经物体表面扭曲的条纹图案,最后通过计算条纹图像的相位信息重建出物体表面的三维形状。然而,目前使用的投影仪和摄像机存在一定的伽马效应,导致摄像机捕获的条纹图案产生不必要的强度变化,并在重建结果中引入严重的相位误差。因此,为了保证重建结果的测量精度,需要对伽马效应引起的非线性误差进行矫正。
2、目前,已经提出很多方法用于矫正伽马非线性误差。这些方法总体上可以分为三类:第一类方法是根据一些预校准步骤提前估计出整个测量系统的非线性误差,然后在实际测量结果中利用预校准信息直接对误差进行补偿,这类方法虽然在不减缓测量速度的情况下矫正了误差,但是当测量环境发生变化时需要重新进行预校准(optics letters,2011,36(2):154–156);第二类方法则是通过投射额外的条纹图像获得与原相位误差曲线相反的相位图,并与原相位进行平均从而降低整体误差,此类方法虽然有一定的矫正效果,但是投射额外的图案会降低测量速度(ieee transactions on instrumentation andmeasurement,2021,70:7006509);第三类方法是对原相位图使用希尔伯特变换或其他频域变换的方法获取额外的相位图进行误差平均,该类方法虽然不需要预校准步骤和额外的条纹图像,但只能处理表面相对平滑的物体(optics express,2015,23(19):25171–25181)。
3、综上所述,如何保证测量速度和测量精度的同时提出一种操作简单、方便实施的伽马非线性误差矫正方法仍然是一个亟需解决的问题。
技术实现思路
1、本发明提供一种用于条纹投影三维测量的伽马非线性误差矫正方法,以解决上述背景技术中存在的问题。
2、为了实现上述目的,本发明采取的技术方案为:一种用于条纹投影三维测量的伽马非线性误差矫正方法,具体包括以下步骤:
3、步骤s1:搭建一个条纹投影三维测量系统,包括投影仪和摄像机,所述投影仪和摄像机同步触发开启工作,投影仪、摄像机和被测物体三者构成三角测量关系,系统已完成高度-相位值转化关系的标定;
4、步骤s2:投影仪依次投射相移条纹图案至被测物体表面,与此同时,摄像机捕获经被测物体表面扭曲的条纹图案;以三步相移法为例进行技术方案的阐述,摄像机捕获的三步相移条纹图案的光强表示为:
5、i1(x,y)=a(x,y)+b(x,y)cos[φg(x,y)-2π/3];
6、i2(x,y)=a(x,y)+b(x,y)cos[φg(x,y)];
7、i1(x,y)=a(x,y)+b(x,y)cos[φg(x,y)+2π/3];
8、式中:(x,y)表示摄像机坐标;i1(x,y)、i2(x,y)、i3(x,y)表示三步相移条纹图案强度;a(x,y)、b(x,y)分别表示背景光强和调制光强;φg(x,y)表示受系统伽马效应影响的包裹相位;
9、步骤s3:通过三步相移法计算出受系统伽马效应影响的包裹相位φg(x,y);
10、步骤s4:将受系统伽马效应影响的包裹相位φg(x,y)转化为极坐标系下的表达形式,然后绘制出所有极坐标的极径得到极径的空间分布图;
11、步骤s5:通过平均相邻极径之间的夹角使极径在极坐标系空间中均匀分布;
12、步骤s6:将均衡化后的极径的空间分布图还原为矫正后的包裹相位φc(x,y),其值完全均匀分布在0到2π内;
13、步骤s7:利用相位展开算法对矫正后的φc(x,y)解包裹获得绝对相位φ(x,y),然后根据高度-相位值的转化关系将绝对相位φ(x,y)转化为高度信息,并进行物体表面的三维重建。
14、进一步的,所述步骤s3三步相移法求解受系统伽马效应影响的包裹相位φg(x,y)可以表示为:
15、
16、式中:(x,y)表示摄像机坐标;i1(x,y)、i2(x,y)、i3(x,y)表示三步相移条纹图案强度。
17、进一步的,所述步骤s4中极坐标系下的表达形式中极角为包裹相位值,极经长度均设为1;所述极经与极坐标定义中的极经有所不同,极坐标定义中的极经为标量,仅代表极坐标点到极点之间的距离;所述极经是指极坐标点到极点之间的连线,其含义包括该线段的长度和在极坐标系中的空间位置。
18、进一步的,所述步骤s5中极经在极坐标系空间中均匀分布是指在任意等长度的极角区间内所包含的极经数是相同的。
19、进一步的,所述步骤s7中解包裹的计算过程为:
20、φ(x,y)=φc(x,y)+2πk(x,y);
21、式中:k(x,y)表示条纹级次,可通过相位展开算法求得;所述相位展开算法为现有技术,不再赘述。
22、进一步的,所述步骤s5中平均相邻极经之间的夹角采用的方法,可分为以下几个子步骤:
23、步骤s51:提取弦分布图中的极角值构成极角序列θi,并根据受系统伽马效应影响的包裹相位φg(x,y)添加到弦分布图中的顺序对θi进行编号;注意,所述编号用于将均衡化后的弦分布图还原为包裹相位图;
24、步骤s52:对θi升序排列得到θ′i;注意,编号将始终记录序列θi中各个元素的初始位置;
25、步骤s53:由θ′i计算出相邻极角的夹角值序列δθ′i:
26、
27、步骤s54:求δθ′i的平均值:
28、
29、式中:m表示δθ′i中的夹角值总数;
30、步骤s55:利用生成夹角相等的极角序列θ″i:
31、
32、步骤s56:按照步骤s51中的编号重新排列θ″i,使编号恢复为初始顺序;
33、步骤s57:根据步骤s55中重新排列后的θ″i生成均匀的极经分布图;其中,所述均匀的极经分布图中极坐标s1应当对应重新排列后的θ″i中编号为1的极角值,s2应当对应编号为2的极角值,依此类推。
34、采用以上技术方案的有益效果是:
35、1、本发明提供的一种用于条纹投影三维测量的伽马非线性误差矫正方法,在不减缓测量速度的同时有效提升了条纹投影三维测量结果的精度。
36、2、本发明提供的一种用于条纹投影三维测量的伽马非线性误差矫正方法,无需进行任何预校准步骤即可矫正系统伽马效应引起的误差,误差矫正过程方便快捷,相比于其他方法适用范围更广。
37、3、本发明提供的一种用于条纹投影三维测量的伽马非线性误差矫正方法,通过均衡化包裹相位在极坐标系下的极经分布图来矫正包裹相位值的概率分布,因此相比于频域变换等方法在测量复杂物体或表面高度差较大的物体时不会引入额外的边缘轮廓误差。
- 还没有人留言评论。精彩留言会获得点赞!