一种微零件定位转移装置以及使用方法
本发明涉及微米级零件定位操作,具体涉及一种微零件定位转移装置以及使用方法。
背景技术:
1、目前,微米级零件的检测和操作在微器件装配、精密制造、光电工程等领域具有广泛的应用。由于微米级对象尺寸微小,其检测和操作通常在显微镜下进行。对于亚毫米级对象,微零件的视觉图像容易和背景区分,可较方便地基于显微图像处理进行检测和操作。随着操作对象的尺寸进一步减小,对于几十微米尺寸甚至更小的微零件,由于基底表面粗糙度、周围杂质干扰等因素影响,微零件和外界干扰对象常难以准确区分。另外,在微操作工序中,微零件可能分布于相对较大的范围内,而高分辨率显微镜视野狭小,难以覆盖整个基底范围。
2、综上所述,现有技术是人工配合显微镜进行人工挑选,由于缺少有效的人机交互手段,导致工作效率较低的问题。
技术实现思路
1、本发明为解决现有技术是人工配合显微镜进行人工挑选,由于缺少有效的人机交互手段,导致工作效率较低的问题,而提出一种微零件定位转移装置。
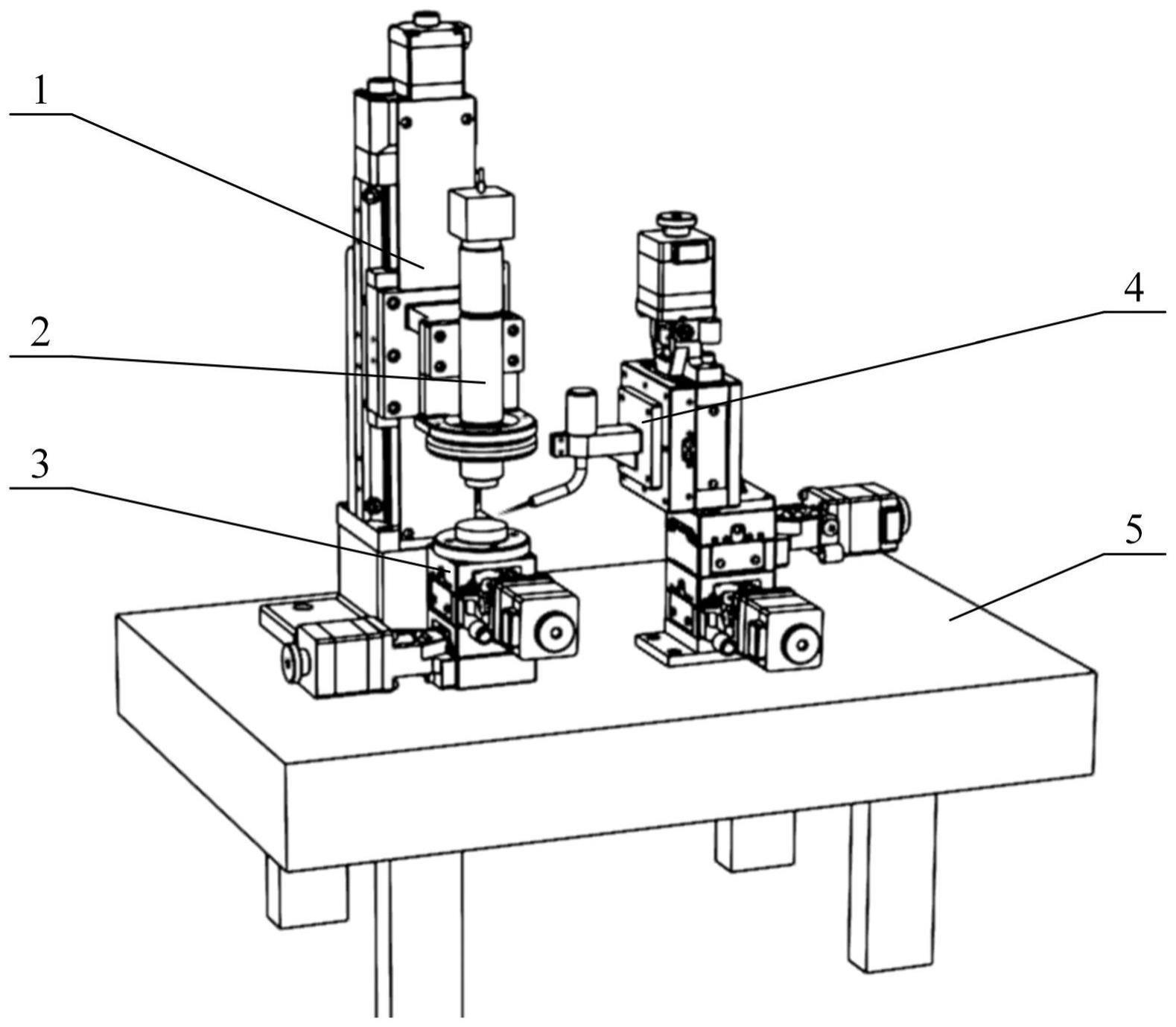
2、本发明的一种微零件定位转移装置,其组成包括竖直显微视觉单元1、两自由度样品台单元3、三自由度微针操作单元4和隔震平台5;
3、隔震平台5的上表面中部沿长度方向依次设置竖直显微视觉单元1和三自由度微针操作单元4,竖直显微视觉单元1的一旁设有两自由度样品台单元3,且两自由度样品台单元3的底部与隔震平台5的上表面固定连接;
4、进一步的,所述的竖直显微视觉单元1包括视觉检测模块2、竖直升降电动台6和升降电动台支架7;
5、竖直升降电动台6的底部设有升降电动台支架7,竖直升降电动台6的升降滑板上设有视觉检测模块2;
6、进一步的,所述的升降电动台支架7的底部通过螺栓与隔震平台5的上表面固定连接;
7、进一步的,所述的视觉检测模块2包括工业相机8、电动变倍显微镜9、视觉检测模块支架10和led灯盘11;
8、视觉检测模块支架10上设有电动变倍显微镜9,电动变倍显微镜9的观测端与工业相机8的拍照端连接,电动变倍显微镜9的捕捉端上套设有led灯盘11;
9、进一步的,所述的两自由度样品台单元3包括x方向平移运动平台12、样品托盘底座13和y方向平移运动平台14;
10、y方向平移运动平台14的上表面设有x方向平移运动平台12,x方向平移运动平台12的上表面设有样品托盘底座13;
11、进一步的,所述的三自由度微针操作单元4包括微针z向移动平台15、微针支架16、微针17、三自由度电动平台支架18、微针y向移动平台19和微针x向移动平台20;
12、三自由度电动平台支架18的上表面设有微针x向移动平台20,微针x向移动平台20的上表面设有微针y向移动平台19,微针y向移动平台19的上表面设有微针z向移动平台15,微针z向移动平台15的滑动托板的侧面设有微针支架16,微针支架16上设有微针17;
13、进一步的,所述的三自由度电动平台支架18通过螺栓与隔震平台5的上表面固定连接;
14、进一步的,一种微零件定位转移装置还包括工控机和显示器21,隔震平台5的外部设有工控机,工控机的视频信号输出端通过线缆与显示器21的视频信号输入端连接;
15、进一步的,所述的工业相机8的视频信号输出端与工控机的视频信号输入端连接;
16、本发明的一种微零件定位转移装置的使用方法,其具体方法如下:
17、步骤一:将含有样品的样品托盘放置于样品托盘底座13上;
18、步骤二:将微零件定位转移装置中的竖直升降电动台6和两自由度样品台单元3回至初始位置,并将电动变倍显微镜9回至初始放大倍数;
19、步骤三:将鼠标与工控机相连,并利用现有的控制算法,按住鼠标滚轮,在显示器21内移动鼠标,控制竖直升降电动台6跟随光标快速升降,并对电动变倍显微镜9进行粗调焦。按住鼠标滚轮向上拖动时,竖直升降电动台6快速向上移动;按住鼠标滚轮向下拖动时,竖直升降电动台6快速向下移动;
20、步骤四:滚动鼠标滚轮控制竖直升降电动台6缓慢升降,使电动变倍显微镜9进行细调焦,直至样品基底清晰成像;
21、步骤五:按住鼠标左键,在平面内移动鼠标,控制两自由度样品台单元3跟随光标在水平内移动,同时观察显微图像视野内是否存在样品。鼠标左键移动方向和两自由度样品台单元3移动方向一致;
22、步骤六:重复步骤五,直至找到合适的样品,此时记录样品图像的位置,并记录样品台所在位置,完成微零件定位,从而可以进行后续作业;
23、步骤七:在现有的控制算法中切换控制对象,使鼠标对三自由度微针操作单元4进行控制,按住鼠标左键,在显示器21内移动鼠标,控制三自由度微针操作单元4上的微针17跟随光标在水平内移动,滑动鼠标滚轮控制三自由度微针操作单元4上的微针17上下移动;依据显微图像反馈,将操作微针17移动至样品处,对样品进行操作或转移处理;
24、步骤八:样品转移至目标位置后,执行释放功能,此时微针17以指定振幅和指定频率振动,实现微零件的有效释放。
25、本发明与现有技术相比具有以下有益效果:
26、本发明克服了现有技术的缺点,利用工控机上连接的鼠标来控制该装置上的竖直显微视觉单元、两自由度样品台单元和三自由度微针操作单元的运动方向,从而可以利用电动变倍显微镜将两自由度样品台单元中样品托盘底座上的微零件进行捕捉,并将捕捉的画面通过工业相机进行拍照,最终实时的将画面传到工控机中,工控机再将画面传输到显示器中,从而便于操作人员可以清晰的观察到微零件的位置以及排列关系,当画面出现模糊时,可通过调节电变倍显微镜进行调焦,从而解决模糊的问题;最后再通过工控机上的鼠标控制三自由度微针操作单元xyz三个方向的运动,从而可以控制微针的运动,可利用微针对样品托板底座上的微零件进行位置的变换;利用此种人机交互方式对微零件进行定位和移动,大大的减小了操作人员的工作量,从而提高了工作效率。
技术特征:
1.一种微零件定位转移装置,其特征在于:它包括竖直显微视觉单元(1)、两自由度样品台单元(3)、三自由度微针操作单元(4)和隔震平台(5);
2.根据权利要求1所述的一种微零件定位转移装置,其特征在于:所述的竖直显微视觉单元(1)包括视觉检测模块(2)、竖直升降电动台(6)和升降电动台支架(7);
3.根据权利要求2所述的一种微零件定位转移装置,其特征在于:所述的升降电动台支架(7)的底部通过螺栓与隔震平台(5)的上表面固定连接。
4.根据权利要求2所述的一种微零件定位转移装置,其特征在于:所述的视觉检测模块(2)包括工业相机(8)、电动变倍显微镜(9)、视觉检测模块支架(10)和led灯盘(11);
5.根据权利要求1所述的一种微零件定位转移装置,其特征在于:所述的两自由度样品台单元(3)包括x方向平移运动平台(12)、样品托盘底座(13)和y方向平移运动平台(14);
6.根据权利要求1所述的一种微零件定位转移装置,其特征在于:所述的三自由度微针操作单元(4)包括微针z向移动平台(15)、微针支架(16)、微针(17)、三自由度电动平台支架(18)、微针y向移动平台(19)和微针x向移动平台(20);
7.根据权利要求6所述的一种微零件定位转移装置,其特征在于:所述的三自由度电动平台支架(18)通过螺栓与隔震平台(5)的上表面固定连接。
8.根据权利要求1所述的一种微零件定位转移装置,其特征在于:它还包括工控机和显示器(21),隔震平台(5)的外部设有工控机,工控机的视频信号输出端通过线缆与显示器(21)的视频信号输入端连接。
9.根据权利要求4所述的一种微零件定位转移装置,其特征在于:所述的工业相机(8)的视频信号输出端与工控机的视频信号输入端连接。
10.一种根据权利要求1至9中任意一项中所述微零件定位转移装置的使用方法,其特征在于:具体方法如下:
技术总结
一种微零件定位转移装置以及使用方法,涉及微米级零件定位操作技术领域。为解决现有技术是人工配合显微镜进行人工挑选,由于缺少有效的人机交互手段,导致工作效率较低的问题。利用电动变倍显微镜将两自由度样品台单元中样品托盘底座上的微零件进行捕捉,并将捕捉的画面通过工业相机进行拍照,实时的将画面传到显示器中,从而便于操作人员可以清晰的观察到微零件的位置以及排列关系;最后再通过工控机上的鼠标控制三自由度微针操作单元XYZ三个方向的运动,利用微针对样品托板底座上的微零件进行位置变换;利用此种人机交互方式对微零件进行定位和移动,减小了操作人员的工作量,从而提高了工作效率。本发明适用于对微零件进行定位与转移。
技术研发人员:王乐锋,孙懿,赵敏,荣伟彬
受保护的技术使用者:哈尔滨工业大学
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!