基于深度学习的速度谱自动拾取方法和装置与流程
本发明涉及油气勘探中的地震数据处理,特别涉及一种基于深度学习的速度谱自动拾取方法和装置。
背景技术:
1、在油气勘探的地数据处理过程中通常需要对速度谱进行拾取,目前速度谱拾取工作是通过人机交互的方式实现的,通过对比多项参考数据在速度谱上拾取适当的“时间-速度”对,利用所拾取速度动校正拉平对应共中心点(common middle point,cmp)道集同相轴,这一过程需要具有丰富地震处理经验和地质学术背景的专业技术人员花费大量的时间来完成。随着对海量数据和速度谱高密度解释的处理要求,人工速度谱拾取越来越难以满足实际生产需要,迫切需要实现速度谱拾取工作的自动化。
2、目前,在速度谱自动拾取方面的研究大致分为两类:
3、一类是基于非线性反演的方法,例如共轭梯度法、蒙特卡洛法等,即通过建立目标函数和约束条件,全局寻优求解最佳的时间-速度(t-v)对位置,但该类方法需要一定的先验约束作为条件,手动设置参数和初始模型,并且计算效率与准确度偏低。
4、另一类是基于人工智能技术的方法,主要包括两类:第一类是利用机器学习的方法,通过识别速度谱中的能量团峰值来获得叠加速度,如使用bp神经网络,或者将bp神经网络与二叉排序树等相结合,以及一些其它的无监督学习的机器学习方法,如k-means聚类和dbscan聚类算法(一种基于密度的聚类算法)等等。第二类是基于人工智能的深度学习的方法来对速度谱中的能量团峰值进行检测,通过提取速度谱中拾取位置的特征来对网络模型进行训练并预测,如卷积神经网络(cnn)、循环神经网络(rnn)以及长短期记忆网络(lstm)等。
技术实现思路
1、本技术发明人发现,上述基于人工智能技术的方法中,第一类方法由于机器学习存在如早期浅层神经网络学习能力较弱、容易陷入局部极小值或出现过拟合等问题,以及当时计算资源的限制,该方法结果准确度较低,无法达到满意的效果。第二类方法由于所使用网络模型本身的限制,以及提取特征所用数据类型单一,没有对综合参考信息进行特征提取,对中低信噪比数据以及弱能量反射区域其预测准确度低,甚至无法预测,难以满足实际生产需求。
2、鉴于上述问题,提出了本发明以便提供一种克服上述问题或者至少部分地解决上述问题的一种基于深度学习的速度谱自动拾取方法和装置。
3、本发明实施例提供一种基于深度学习的速度谱自动拾取方法,包括:
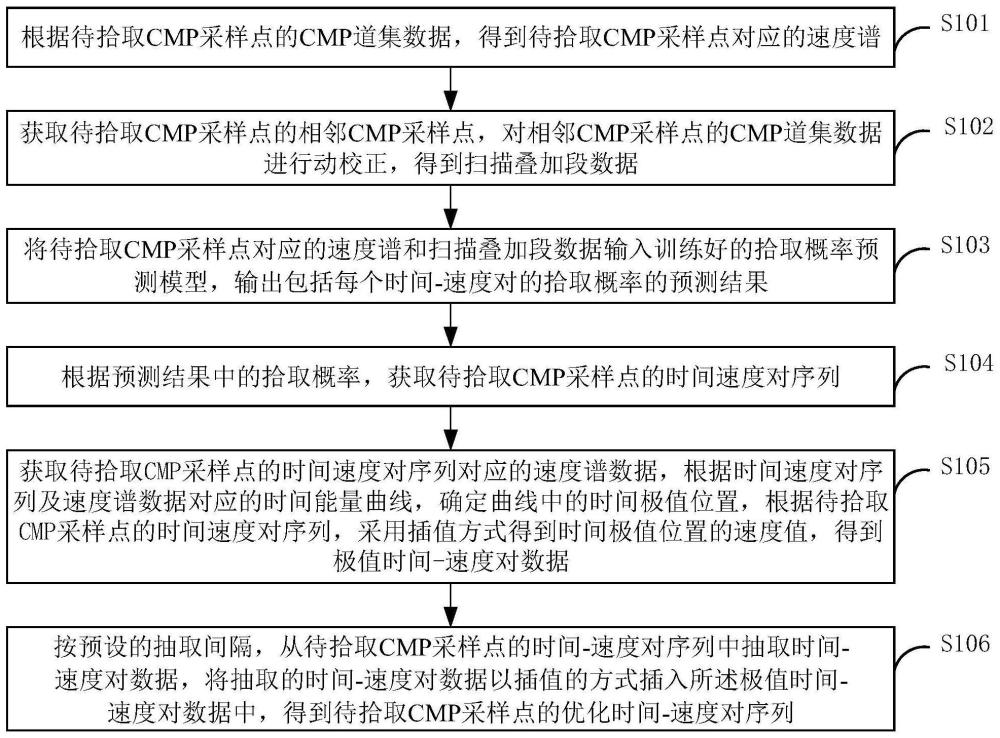
4、根据待拾取cmp采样点的cmp道集数据,得到待拾取cmp采样点对应的速度谱;
5、获取待拾取cmp采样点的相邻cmp采样点,对相邻cmp采样点的cmp道集数据进行动校正,得到扫描叠加段数据;
6、将所述待拾取cmp采样点对应的速度谱和所述扫描叠加段数据输入训练好的拾取概率预测模型,输出包括每个时间-速度对的拾取概率的预测结果;
7、根据所述预测结果中的拾取概率,获取待拾取cmp采样点的时间-速度对序列。
8、在一些可选地实施例中,所述获取待拾取cmp采样点的时间-速度对序列之后,还包括:
9、获取所述时间-速度对序列对应的速度谱数据,根据所述时间-速度对序列及对应的速度谱数据对应的时间能量曲线,确定曲线中的时间极值位置;
10、根据待拾取cmp采样点的时间-速度对序列,采用插值方式得到所述时间极值位置的速度值,得到极值时间-速度对数据。
11、在一些可选地实施例中,所述得到极值时间-速度对之后,还包括;
12、按预设的抽取间隔,从待拾取cmp采样点的时间-速度对序列中抽取时间-速度对数据,将抽取的时间-速度对数据以插值的方式插入所述极值时间-速度对数据中,得到待拾取cmp采样点的优化时间-速度对序列。
13、在一些可选地实施例中,上述方法还包括:
14、将cmp道集数据中的每个纵向位置作为一个待拾取cmp采样点,根据每个cmp采样点的速度谱和扫描叠加段数据,分别获取每个cmp采样点的优化时间-速度对序列。
15、在一些可选地实施例中,上述方法还包括:
16、使用采集的cmp道集数据训练拾取概率预测模型,训练过程包括:
17、根据采集得到的cmp道集数据,确定每个cmp采样点对应的速度谱,对所述速度谱进行增益优化,得到速度谱特征图;
18、针对每个cmp采样点,获取其相邻cmp采样点,对相邻cmp采样点的cmp道集数据进行动校正,得到扫描叠加段数据,对所述扫描叠加段数据进行特征提取,得到扫描叠加段特征图;
19、根据各cmp采样点的所述速度谱特征图和所述扫描叠加段特征图,得到多信息融合特征图,使用得到的得到多信息融合特征图作为样本数据,训练拾取概率预测模型;
20、根据所述拾取概率预测模型的预测结果和cmp道集数据的标注拾取结果,确定模型预设的损失函数符合收敛条件时,得到训练好的拾取概率预测模型;所述预测结果中包括每个cmp采样点的每个时间-速度对的拾取概率;所述标注拾取结果中包括cmp采样点的每个时间-速度对是否被拾取。
21、在一些可选地实施例中,cmp采样点对应的速度谱通过如下公式将计算得到:
22、
23、其中,semblance表示一个cmp采样点对应的速度相似谱数据,m为cmp采样点偏移距方向的采样道数,fi,t(i)为第i道通过扫描叠加速度vstk利用如下时距曲线公式得到的t(i)位置的振幅值;
24、
25、xi为时间坐标t0处的偏移距,vstk为第i道通过扫描叠加速度,t(i)为t0叠加处理后对应的时间坐标位置。
26、在一些可选地实施例中,对所述速度谱进行增益优化,得到速度谱特征图,包括:
27、针对每个cmp采样点:
28、基于预设的增益优化参数,对所述速度谱中的每一列采样数据进行平滑处理,得到平滑处理后的速度谱;
29、对速度谱中的每一列采样数据中的每个样点数据进行指数膨胀;
30、对膨账后的速度谱数据进行归一化处理,以及根据预设的集中阈值对归一化处理后的速度谱数据进行能量集中处理,得到集中处理后的速度谱数据,根据集中处理后的速度谱数据生成增益特征图;
31、重复上述过程生成多个增益特征图,与未增益处理的速度谱特征图拼接形成拼接后的速度谱特征图。
32、在一些可选地实施例中,对相邻cmp采样点的cmp道集数据进行动校正,得到扫描叠加段数据,包括:
33、对待拾取采样点的扫描速度曲线按照选择的k个修改速度产生k条扫描速度曲线;
34、使用所述k条扫描速度曲线对每个相邻cmp采样点的cmp道集进行动校正处理;
35、将处理后的cmp道集数据作为数据道数据,将k条速度扫描曲线作为辅助道数据,得到包括数据道数据和辅助道数据的扫描叠加段数据。
36、在一些可选地实施例中,对所述扫描叠加段数据进行特征提取,得到扫描叠加段特征图,包括:
37、将所述辅助道数据中的k条速度扫描曲线映射至二维空间,对映射后的数据进行双线性插值,形成辅助道特征图;
38、对数据道数据进行数据特征提取,对提取后的数据进行池化处理、通道维度拼接和双线性插值处理,形成数据道特征图;
39、根据辅助道特征图和数据道特征图,叠加生成扫描叠加段特征图。
40、在一些可选地实施例中,得到多信息融合特征图之后,还包括:
41、将所述多信息融合特征图,输入注意力机制处理模块进行处理,得到部分特征加强其他特征减弱后的多信息融合特征图;所述注意力机制模块对所述扫描叠加段特征图进行均值池化、非线性拟合、线性处理、特征加权处理中的至少一项处理。
42、在一些可选地实施例中,根据所述拾取概率预测模型的预测结果和cmp道集数据的标注拾取结果,确定模型预设的损失函数符合收敛条件时,得到训练好的拾取概率预测模型,包括:
43、预测结果中包括每个cmp采样点的每个时间-速度对的拾取概率作为预测值,根据标注拾取结果中标注的每个时间-速度对是否被拾取的信息得到标签真实值;
44、将预测值和标签真实值代入预设的损失函数中,得到损失值,若损失值不符合收敛条件,根据损失值更新拾取概率预测模型的模型参数,基于更新后的模型参数再次预测每个cmp采样点的每个时间-速度对的拾取概率并计算新的损失值,直至损失值符合预设的收敛条件,得到练好的拾取概率预测模型。
45、本发明实施例提供一种基于深度学习的速度谱自动拾取装置,包括:
46、第一获取模块,用于根据待拾取cmp采样点的cmp道集数据,得到待拾取cmp采样点对应的速度谱;
47、第二获取模块,用于获取待拾取cmp采样点的相邻cmp采样点,对相邻cmp采样点的cmp道集数据进行动校正,得到扫描叠加段数据;
48、预测模块,用于将所述待拾取cmp采样点对应的速度谱和所述扫描叠加段数据输入训练好的拾取概率预测模型,输出包括每个时间-速度对的拾取概率的预测结果;
49、拾取模块,用于根据所述预测结果中的拾取概率,获取待拾取cmp采样点的时间-速度对序列。
50、在一些可选地实施例中,上述装置还包括:
51、模型训练模块,用于使用采集的cmp道集数据训练拾取概率预测模型,训练过程包括:
52、根据采集得到的cmp道集数据,确定每个cmp采样点对应的速度谱,对所述速度谱进行增益优化,得到速度谱特征图;
53、针对每个cmp采样点,获取其相邻cmp采样点,对相邻cmp采样点的cmp道集数据进行动校正,得到扫描叠加段数据,对所述扫描叠加段数据进行特征提取,得到扫描叠加段特征图;
54、根据各cmp采样点的所述速度谱特征图和所述扫描叠加段特征图,得到多信息融合特征图,使用得到的得到多信息融合特征图作为样本数据,训练拾取概率预测模型;
55、根据所述拾取概率预测模型的预测结果和cmp道集数据的标注拾取结果,确定模型预设的损失函数符合收敛条件时,得到训练好的额拾取概率预测模型;所述预测结果中包括每个cmp采样点的每个时间-速度对的拾取概率;所述标注拾取结果中包括cmp采样点的每个时间-速度对是否被拾取。
56、本发明实施例提供一种计算机存储介质,所述计算机存储介质中存储有计算机可执行指令,所述计算机可执行指令被处理器执行时实现上述的基于深度学习的速度谱自动拾取方法。
57、本发明实施例提供一种计算机设备,包括:存储器、处理器及存储于存储器上并可在处理器上运行的计算机程序,所述处理器执行所述程序时实现上述的基于深度学习的速度谱自动拾取方法。
58、本发明实施例提供的上述技术方案的有益效果至少包括:
59、本发明实施例提供的上述方法,根据cmp道集数据中待拾取cmp采样点的速度谱和扫描叠加段数据,利用训练好的拾取概率预测模型对每个时间-速度对的拾取概率进行预测;根据预测结果获取待拾取cmp采样点的时间-速度对序列,实现利用速度谱和描叠加段数据等多信息进行融合处理,基于机器学习模型预测实现对时间-速度对的准确提取,无需人机交互,即可实现速度的准确拾取,自动化程度高,对于低信噪比数据和能量弱区也能实现准确预测和提取,可以满足实际生产需要。
60、本技术的上述方法在基于模型预测提取时间-速度对序列后,能够基于时间能量曲线获取能量团极值位置对拾取结果进行优化,得到优化后的时间-速度对序列,通过合理的优化使获得的速度谱更佳,能更好的满足实际生产需求。
61、通过对采样点的速度谱进行增益优化,结合增益优化后的速度谱特征和未增益优化的速度谱特征构建多信息融合特征数据用于模型的训练,通过训练的模型进行拾取概率的预测,从而能够更好的确定拾取的时间点和对应的速度,使获得的预测模型能够更优,用于时间-速度对的拾取预测时能够获得更好的预测效果,从而使得拾取的时间-速度对序列更合理优化。
62、本发明的其它特征和优点将在随后的说明书中阐述,并且,部分地从说明书中变得显而易见,或者通过实施本发明而了解。本发明的目的和其他优点可通过在所写的说明书、权利要求书、以及附图中所特别指出的结构来实现和获得。
63、下面通过附图和实施例,对本发明的技术方案做进一步的详细描述。
- 还没有人留言评论。精彩留言会获得点赞!