无人机异构双余度传感器装置及余度管理方法
本发明涉及飞行控制领域,具体而言,涉及一种无人机异构双余度传感器装置及余度管理方法。
背景技术:
1、现有的无人机出于成本和技术水平考虑,控制系统和传感器系统大多采用单余度配置。在无人机系统中,传感器数量和种类众多,极易出现由于单个传感器故障或者失效,使得飞行任务不能完成,严重的甚至会导致整架无人机的坠毁。
2、多余度是提高系统任务可靠性与安全可靠性的一种手段,但现在使用多余度传感器的无人机系统大多采用同构的余度电路和余度管理方法,即传感器各个余度电路采用完全相同的硬件电路结构,这种方式带来的问题就是在某一电路出现问题的时候,其同构电路的硬件电路极有可能也出现相同的问题,进而造成无法通过余度/备份的同构电路采集数据。并且,也没有基于异构余度/热备份电路的传感器数据的组合输出方法,无法解决是主或备用传感器出故障时,采用哪个传感器数据进行输出的问题。
技术实现思路
1、针对现有技术的不足,本发明提供一种无人机异构双余度传感器装置及余度管理方法,通过异构双余度传感器的电路结构,解决了同构传感器出现相同电路故障的问题。同时使用一种余度管理方法对异构双余度系统进行管理。具体方案如下:
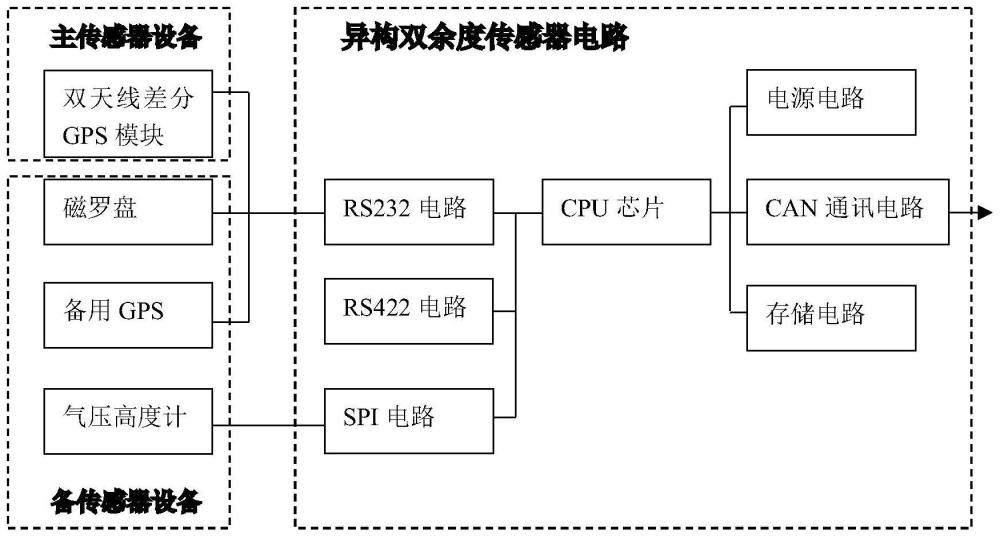
2、一种无人机异构双余度传感器装置,所示该装置设在无人机上,包括:异构双余度传感器电路以及与其连接的主传感器设备、备传感器设备;
3、所述主传感器设备为双天线差分gps模块;
4、所述备传感器设备包括磁罗盘模块、备用gps模块、气压高度计模块;
5、所述异构双余度传感器电路包括:cpu芯片和与其连接的rs232电路、spi电路、电源电路、can通讯电路;所述rs232电路分别连接双天线差分gps模块、磁罗盘模块、备用gps模块;所述spi电路连接气压高度计模块;所述电源电路连接无人机上的12v电源,降压为3.3v输出给该异构双余度传感器电路;所述can通讯电路连接无人机上的控制系统。
6、外部的12v直流电经过整流二极管d2连接至降压芯片u3输入端口in,输入端口in还经过电容c20接地,on/off端口接地,reedback端口输出+5v,out端口经过电容c18与稳压二极管dw1并联后接地;+5v电连接降压芯片u10的输入端in,tab端口连接3.3v电源,芯片u10的输入端in还经过电容c24与电容c25并联后接地,out端口输出3.3v电源,out端口还经过电容c26与电容c27并联后接地。
7、所述rs232电路包括2组连接关系相同的232芯片及其外围电路,其连接双天线差分gps模块、磁罗盘模块、备用gps模块共三路rs232信号。
8、所述每组232芯片及其外围电路包括:芯片u4的c1+端口经过电容c17连接c1-端口,c2+端口经过电容c22连接c2-端口,vcc连接3.3v电源,gnd端口接地,v+端口经过电容c15连接3.3v,3.3v经过电容c16接地,v-端口经过电容c23接地;t1in端口、r1out端口作为第一路rs232信号连接cpu芯片的uart1端口(pa9-pa10),t1out端口、r1in端口作为第一路rs232信号连接双天线差分gps模块;t2in端口、r2out端口作为第二路rs232进出信号连接cpu芯片的uart2端口(pa2-pa3),t2out端口、r2in端口作为第二路rs232信号连接磁罗盘模块;
9、芯片u5的t1in端口、r1out端口作为第三路rs232信号连接cpu芯片的uart3端口(pd8-pd9),t1out端口、r1in端口作为第三路rs232信号连接备用gps模块。
10、所述spi电路包括:气压计芯片u1的vdd端口经过电容c15接地,ps端口、gnd端口接地,sclk、sdi、sdo端口输出spi信号连接至cpu芯片的spi端口(pa5-pa7),csb端口连接cpu芯片的pd7端口。
11、所述can通讯电路包括:3.3v经过电容c21连接至gnd端口,vcc端口连接3.3v,txd、rxd端口为can信号连接至cpu芯片的can端口(pa12-pa11),rs端口经过电阻r9接地gnd端口,canh、canl端口之间连接电阻r15,canh、canl连接can总线接口。
12、所述该异构双余度传感器电路还包括存储电路:sd卡槽m1的d0-d3、clk、cmd端口分别连接cpu芯片的scio存储端口(pa8-pa12),还分别经过上拉电阻r10-r14连接3.3v电源,vcc端口连接3.3v电源。
13、无人机异构双余度传感器余度管理方法,包括以下步骤:
14、s1、传感器数据更新:通过通讯接口,接收主/备传感器单元数据,同时记录各传感器模块数据更新时间;
15、s2、传感器故障诊断:通过传感器数据与门限值对比,判断主/备传感器单元中各传感器故障状态;
16、s3、仲裁切换:根据主/备传感器单元各传感器工作模式和故障,选择输出数据组合。
17、所述步骤s2具体包括以下步骤:
18、s2.1、将各传感器数据更新时间与门限值对比;若传感器数据更新时间大于门限值,则该传感器故障;
19、s2.2、读取主传感器单元的工作模式,包括是否定位、定位方式(单点或差分)、是否建立航向;
20、s2.3、读取备传感器单元的工作模式,包括备用gps是否定位;
21、s2.4、分别将主/备传感器数据与之前周期对比,如在一个设定时间门限值内,数据不变,则主/备传感器故障;
22、s2.5、分别将主/备传感器数据与上一周期数据对比,如差值大于门限值,则主/备传感器故障。
23、所述步骤s3具体包括以下步骤:
24、s3.1、如主传感器单元和备传感器单元均工作正常,选择主传感器单元数据输出,并根据主传感器数据修正备传感器单元数据,用于防止传感器切换时数据产生跳变;
25、s3.2、如主传感器单元差分gps模块未搜索到足够卫星,则位置、速度、高度、航行信息使用备传感器单元;
26、s3.3、如主传感器单元差分gps模块已经定位,但并未建立航向,则位置和速度信息使用主传感器单元差分gps信息,航向信息使用备传感器单元中磁罗盘模块信息;
27、s3.3、如主传感器单元差分gps模块已经定位,并已建立航向,但未差分,则位置和速度信息和航向信息使用主传感器单元差分gps信息,高度信息使用备传感器单元中气压高度计信息;
28、s3.4、如主传感器单元和备传感器单元均故障,无数据输出。
29、本发明的优点及有益效果:
30、1.为避免同构传感器电路在使用过程在容易出现相同故障的情况,主/备传感器使用异构/热备份的电路结构。
31、2.本发明通过将主传感器设备与备传感器设备采用不同传感器、设计成不同的电路结构,并设计异构双余度传感器电路配合各传感器的接口电路,进而提高无人机运行硬件可靠性。
32、3.本发明克服了目前现有技术中使用多余度传感器的无人机系统的同构余度电路,即传感器各个余度电路采用完全相同的硬件电路结构。因此,避免在某一电路出现问题的时,其同构电路极有可能也出现相同的问题,造成硬件电路的余度/热备份作用失效,最终导致各个传感器数据无法被采集的后果。
33、4.本发明基于异构余度/热备份电路的传感器数据的组合输出方法,解决了当主或备用传感器出故障时,采用哪个传感器数据进行组合输出,使得采集数据更加精准。
- 还没有人留言评论。精彩留言会获得点赞!