导航星座对地定向方法与流程
本发明涉及卫星导航定位,具体涉及一种导航星座对地定向方法。
背景技术:
1、卫星导航星座能够利用星间测量数据实现空间基准的自主维持,自主更新卫星轨道与钟差参数,形成自主导航电文通过下行链路播发给用户,在地面系统发生故障等情况下仍能够维持导航定位授时服务。
2、然而,从数学意义上,星间测量对卫星轨道的定向参数如轨道倾角、升交点经度具有不可测性,另外,由于失去地面支持,导航星座无法自主及时解算并更新高精度的地球定向参数。
3、因此,在失去地面系统支持的情况下,导航星座仅依靠自主定轨维持的空间基准会发生漂移,卫星轨道误差增加,导致用户定位精度衰减。
技术实现思路
1、有鉴于此,本发明旨在提出一种导航星座对地定向方法,可实现星座自主空间基准的锚固与修正,尤其是当失去地面系统支持,由卫星导航系统星座进行自主定轨时,可有效提高定位精度。
2、本发明实施例提供一种导航星座对地定向方法,所述方法包括:
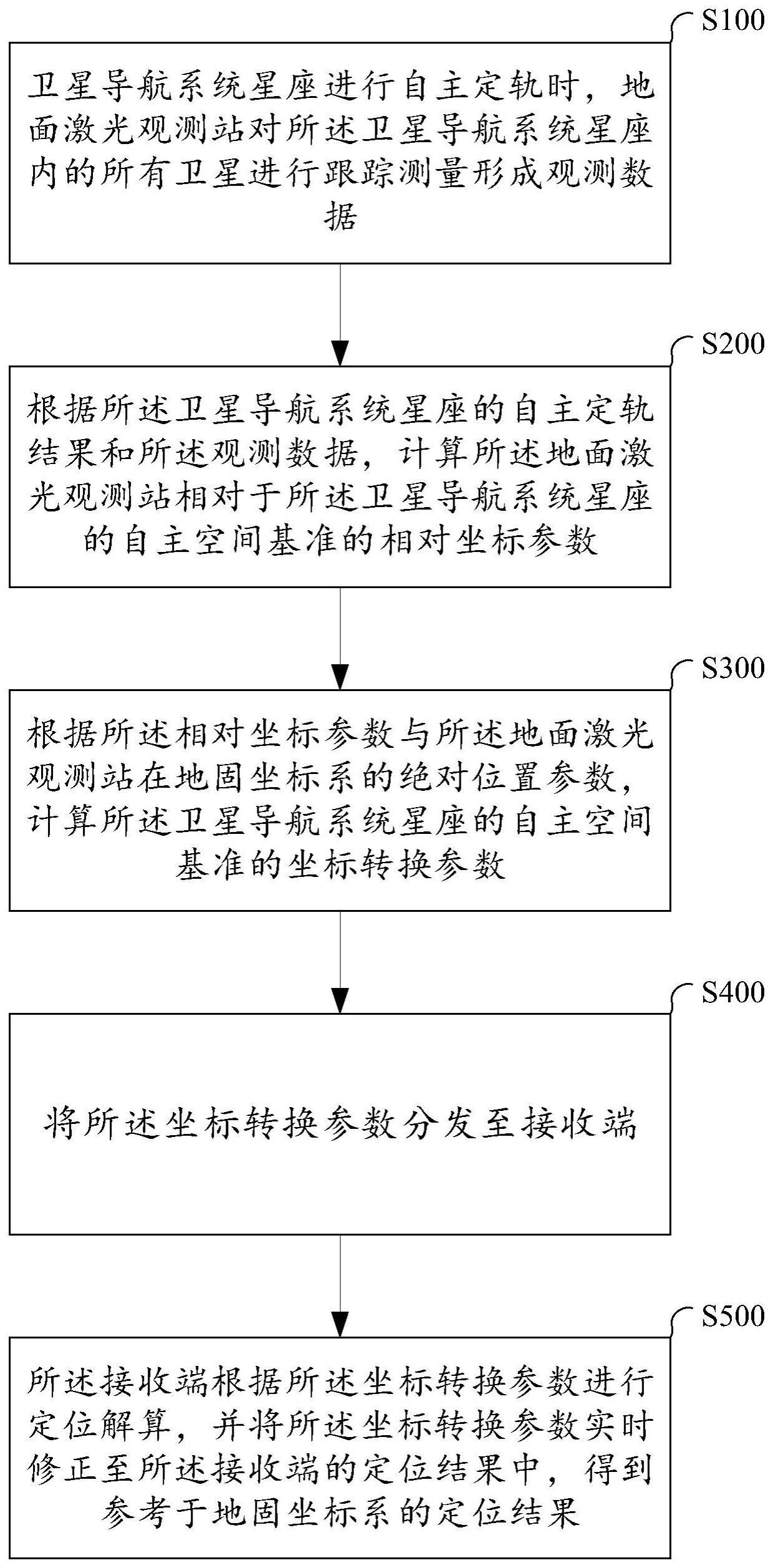
3、s100,卫星导航系统星座进行自主定轨时,地面激光观测站对所述卫星导航系统星座内的所有卫星进行跟踪测量形成观测数据;
4、s200,根据所述卫星导航系统星座的自主定轨结果和所述观测数据,计算所述地面激光观测站相对于所述卫星导航系统星座的自主空间基准的相对坐标参数;
5、s300,根据所述相对坐标参数与所述地面激光观测站在地固坐标系的绝对位置参数,计算所述卫星导航系统星座的自主空间基准的坐标转换参数;
6、s400,将所述坐标转换参数分发至接收端;
7、s500,所述接收端根据所述坐标转换参数进行定位解算,并将所述坐标转换参数实时修正至所述接收端的定位结果中,得到参考于地固坐标系的定位结果。
8、在本发明的优选实施例中,步骤s100中还包括:
9、所述地面激光观测站对所述卫星采用卫星激光测距方式进行跟踪测量形成所述观测数据。
10、在本发明的优选实施例中,步骤s100中:
11、调度多个地面激光观测站对所述卫星导航系统星座内的卫星进行跟踪测量,所述多个地面激光观测站之间呈全球分布、广域分布或局域分布。
12、在本发明的优选实施例中,步骤s200包括:
13、在t时刻,地面激光观测站ri对所述卫星导航系统星座内的导航卫星sj的观测方程为:
14、
15、其中,为所述地面激光观测站ri对导航卫星sj在t时刻的卫星激光测距观测;为所述地面激光观测站本身位置的潮汐变化给测距带来的误差;为测距光线在大气中的折射效应给测距带来的误差;为光线在引力场中的广义相对论效应给测距带来的偏差;为激光在导航卫星sj表面的反射点对质心的偏离;为所述地面激光观测站本身观测的系统偏差;为所述地面激光观测站ri对导航卫星sj在t时刻的近似距离,为:
16、
17、其中,和分别为t时刻所述地面激光观测站ri和导航卫星sj自主定轨结果在所述卫星导航系统星座的自主空间基准下的位置参数;为星上自主定轨结果中的参数;为所述地面激光观测站ri相对于所述卫星导航系统星座的自主空间基准的相对坐标参数。
18、在本发明的优选实施例中,步骤s300中:
19、地面数据处理中心将所述相对坐标参数与所述绝对位置参数做差值运算,并通过布尔沙七参数模型表征不同所述地面激光观测站的差值,并通过最小二乘方法计算所述坐标转换参数。
20、在本发明的优选实施例中,步骤s300中:
21、通过布尔莎转换七参数表征地固坐标系与所述卫星导航系统星座的自主空间基准的旋转关系为:
22、
23、其中,为所述地面激光观测站ri在所述地固坐标系的绝对位置参数,tx、ty、tz分别为所述地固坐标系与所述卫星导航系统星座的自主空间基准的原点转换参数,m为地固坐标系与所述卫星导航系统星座的自主空间基准的尺度转换参数,ωz、ωy和ωx分别为地固坐标系与所述卫星导航系统星座的自主空间基准的旋转三角度。
24、在本发明的优选实施例中,步骤s400中:
25、地面数据处理中心将所述坐标转换参数通过所述卫星导航系统星座的短报文通信链路分发至所述接收端。
26、在本发明的优选实施例中,步骤s500中:
27、所述接收端在接收所述坐标转换参数的同时对导航卫星跟踪测量形成伪距相位数据,所述接收端根据所述伪距相位数据及所述坐标转换参数单点定位解算。
28、在本发明的优选实施例中,步骤s500中:
29、任一地面激光观测站i和任一卫星j的伪距观测方程为:
30、
31、其中,δtr为接收机钟差,τ为信号传播光行时,δts为卫星钟差,δdtrop为对流层延迟,δdion为电离层延迟,δdrel为相对论延迟,分别为接收机和卫星的天线相位中心偏差修正值,δdtide为潮汐板块位移引起的星地距离变化,δdmult为伪距多路径效应,ε为伪距噪声;
32、消电离层组合的观测方程为:
33、
34、
35、其中,和分别为b1/b2双频无电离层组合、b1/b3双频无电离层组合,和分别为b1、b2和b3三个频点的伪距测量,ifb1、ifb2、ifb3分别为接收机b1、b2和b3频点的群延迟参数,tgd1、tgd2、tgd3分别为卫星b1、b2和b3频点的群延迟参数,f1、f2、f3分别为b1、b2和b3频点的频率值,分别为接收机b1、b2和b3频点的相位中心偏差在星地距离的投影,分别为卫星b1、b2和b3频点的相位中心偏差在星地距离的投影;
36、将所述观测方程线性化,其中,所述地面激光观测站三维位置分量改正(dx,dy,dz),测站钟差δtr未知,对四颗及四颗以上的可被观测到的卫星通过最小二乘法反复迭代,将解算后的三维位置分量改正(dx,dy,dz)和测站钟差改正分量δtr与初始位置坐标与初始测站钟差相加,得到所述用户端最终定位结果和站钟差。
37、在本发明的优选实施例中,步骤s500中:
38、所述接收机相对于所述卫星导航系统星座的自主空间基准的位置参数记为根据所述坐标转换参数,解算相对于地固坐标系的位置为:
39、
40、其中,tx、ty、tz分别为地固坐标系与所述卫星导航系统星座的自主空间基准的原点转换参数,m为地固坐标系与所述卫星导航系统星座的自主空间基准的尺度转换参数,ωz、ωy和ωx分别为地固坐标系与所述卫星导航系统星座的自主空间基准的旋转三角度。
41、根据本发明的方案,当卫星导航系统星座进行自主定轨时,采用卫星激光测距跟踪测量的观测数据和地面激光观测站计算出卫星导航系统星座的自主空间基准的坐标转换参数,坐标转换参数包括旋转参数,并通过卫星导航系统特有的短报文通信链路将旋转参数播发给接收端,接收端即用户,实现卫星导航系统的空间自主基准旋转参数的分发,用户通过修正旋转参数,实现星座自主运行空间基准的锚固与修正,进而提高用户定位精度。本发明不仅可实现卫星导航系统的空间自主基准的锚固和修正,提高卫星导航系统的服务能力,还提供了一种空间自主基准旋转参数分发的手段,尤其是可以在卫星导航系统失去地面支持的情况下,仍然可以在用户端确保高精度的定位服务。
- 还没有人留言评论。精彩留言会获得点赞!