一种台风降水短临预测模型优化及预测方法
1.本发明属于人工智能领域,具体涉及一种台风降水短临预测模型优化及预测方法。
背景技术:
2.大尺度大气环流、水汽输送以及其他同期天气系统与台风降水存在显著时空关联,表征宏观天气系统的高阶时空特征对构建台风降水长距离时空依赖具有重要意义。然而,基于卷积神经网络的空间编码感受野相对有限,基于循环神经网络的时序编码也存在长期衰减问题,二者皆难以有效建模长距离时空依赖关系。一些研究通过自注意力机制结合位置编码的方式开展长距离时空建模,但在高维时空域中,自注意力机制pixel-to-pixel的建模方式带来巨大计算量的同时也增加了拟合难度。另一方面,自注意力在计算过程中只考虑了pixel间的时空关联,忽略了更高层次时空特征之间的关联。如何以较小的算力为代价提升模型对长距离时空依赖的感知和建模能力,进一步提升优化模型的预测能力是本章的主要目标。
技术实现要素:
3.本发明的目的是克服现有的不足,提供一种台风降水短临预测模型优化及预测方法。
4.为实现本发明目的,提供的技术方案如下:
5.第一方面,本发明提供了一种台风降水短临预测模型优化方法,其用于对编码器-解码器结构的台风降水短临预测模型进行优化,优化方法的步骤如下:
6.s1:获取待优化的台风降水短临预测模型中编码器和解码器各自的原始特征图,并对原始特征图进行区域划分并获取每个区域特征在高维特征空间的表征,使每个原始特征图分别形成对应的时空语义特征;
7.s2:基于s1得到的时空语义特征进一步进行多层语义全时空信息交互,构建从时空语义特征到具有全时空视野的多层语义时空特征,为后续时空注意力的计算提供具有全时空感受野的多尺度时空语义特征;
8.s3:基于具有多层级语义全时空视野的多尺度时空语义特征,引入注意力机制构建空间、时间、通道三头注意力模块,开展降水长距离时空注意力计算,计算以块为单元的时空注意力,最终结果经过块解码,通过残差结构与原始特征图进行融合,自适应增强预测时序时空特征表达,提高台风降水短临预测模型的预测准确性。
9.基于上述技术方案,各步骤优选采用如下具体方式实现。其中各步骤的优选实现方式在没有冲突的情况下均可进行相应组合,不构成限制。
10.作为上述第一方面的优选,所述步骤s1中,所述台风降水短临预测模型包含编码器和解码器;编码器中包含三个级联的block模块,每个block模块为一组级联的convolution层和convlstm层;解码器同样包含三个级联的block模块,每个block模块为一
组级联的convlstm操作和deconvolution操作;所述s1中提取编码器中第一个block模块的六个时序特征图和解码器中最后一个block模块的六个预测时序特征图计算时空语义特征,且编码器中提取的时序特征图为convolution层输出的时序特征编码,用来构建自注意力机制中的键和值,解码器中提取的预测时序特征图为convlstm层输出的预测时序特征,用来构建自注意力机制中的查询。
11.作为上述第一方面的优选,所述步骤s1中,针对原始台风降水短临预测模型中编码器和解码器各自的特征图,按照s11~s13进行处理:
12.s11:针对每个原始尺寸为c
×h×
w的特征图进行区域划分,通过预设的p
×
p块大小(patch size)对空间区域进行规则划分并裁剪,获得h/p
×
w/p个块(patch)区域;
13.s12:基于c
′
个维度为c
×
p
×
p的卷积核对每个块区域进行并行编码,其中c
′
》c,且为了保证每个块区域提取的模式保持一致,对所有块区域的编码卷积核进行参数共享,得到h/p
×
w/p个维度为c
′×1×
1的块区域特征图后重新组合为c
′×
h/p
×
w/p维度的时空语义特征;
14.s14:针对编码器的六个输入时序的特征图和解码器的六个预测时序的特征图,分别按照s11和s12转换得到维度为c
′×
h/p
×
w/p的时空语义特征。
15.作为上述第一方面的优选,所述步骤s2的具体方法如下:
16.s21:将编码器对应的六个时空语义特征和解码器对应的六个时空语义特征分别串接融合,得到维度为(s
in
×c′
,h/p,w/p)和(s
out
×c′
,h/p,w/p)的两个时空特征cpf
in
和cpf
out
的初始值;
[0017][0018][0019]
式中:concat表示串接融合操作;s
in
和s
out
分别表示编码器和解码器中的输入时序的特征图,均为6;
[0020]
s22:采用多层堆叠深度可分离卷积(depthwise separable convolution,dsc),对s21中得到的初始时空特征cpf
in
和cpf
out
分别在空间和特征深度方向进行cross-patch的交叉卷积,第i层堆叠深度可分离卷积的输出特征表示为cpfi;
[0021]
s23:经过s22中共n层堆叠深度可分离卷积后得到n+1个特征图cpfi,i∈[0,n],分别表示从时空语义特征到具有全局感受野的不同语义层级时空特征,再采用逐像素加和的方式将不同语义层级的时空特征进行加权融合,最终得到多尺度时空语义特征tcpf为:
[0022][0023]
其中,λ0,λ1...λn表示n+1个特征图cpf i
的权重,能够通过模型反向传播进行优化。
[0024]
s24:将多尺度时空语义特征按s21中采用的串联拼接方式逆向切分,得到分离后的具有全时空视野和各层级语义信息的各个时刻多尺度时空语义特征tcpfi,i∈[1,12]表示时刻,前六个时刻i∈[1,6]对应输入序列,后六个时刻i∈[7,12]对应输出序列。
[0025]
作为上述第一方面的优选,所述s22中,每层堆叠深度可分离卷积包括depthwise
卷积与pointwise卷积两层网络,每层堆叠深度可分离卷积计算过程表示为:
[0026]
cpfi=dsc(cpf
i-1
)=pw(ds(cpf
i-1
))
[0027]
其中,cpfi表示第i层堆叠深度可分离卷积的输出特征,pw卷积为特征图深度方向上的加权组合操作,其卷积核数等于输出通道数。
[0028]
作为上述第一方面的优选,所述步骤s3的具体方法如下:
[0029]
s31:首先采用两个1*1卷积convk和convv分别对六个输入时刻的多尺度时空语义特征tcpfi进行卷积,获取注意力机制的键k和值v特征,且不同时刻所用的卷积操作convk之间参数共享,不同时刻所用的卷积操作convv之间参数也共享:
[0030]
k=convk(tcpf1,tcpf2…
tcpf6)
[0031]
v=convv(tcpf1,tcpf2…
tcpf6)
[0032]
同时,采用1*1卷积操作convq对六个输出序列的多尺度时空语义特征tcpfi进行卷积,获取注意力机制的查询q特征,不同时刻所用的卷积操作convq彼此参数共享:
[0033]
q=convq(tcpf7,tcpf8…
tcpf
12
)
[0034]
上述得到的k、q、v维度相同,均为(t,c,h,w)。
[0035]
s32:为了计算空间、时间、通道三种不同特征空间中的注意力,对k、q、v分别进行三种维度转换,得到维度分别为(t*c,h*w)、(c*h*w,t)、(t*h*w,c)的三组k、q、v;其中第一组k、q、v为ks、qs、vs,其维度为(t*c,h*w),用于空间注意力计算;第二组k、q、v为kt、qt、vt,其维度为(c*h*w,t),用于时间注意力计算;第三组k、q、v为kc、qc、vc,其维度为(t*h*w,c),用于通道注意力计算;
[0036]
经过空间注意、时间注意、通道注意力计算,分别得到注意力向量为atts、att
t
和attc;
[0037]
s33:计算得到的空间注意力向量atts、时间注意力向量att
t
和通道注意力向量attc通过维度变换统一恢复至(t,c,h,w)维度,并结合权重系数采用逐像素加和方式进行加权融合,得到最终的时空注意力计算结果att
fusion
:
[0038][0039]
其中,att
re
表示维度变换后的att向量;权重系数α,β,γ能够通过模型反向传播进行优化;
[0040]
最终的时空注意力计算结果att
fusion
经过块(patch)解码后,将解码结果通过残差结构融合至台风降水短临预测模型中解码器输出的特征图中,以自适应增强六个预测时序时空特征表达。
[0041]
作为上述第一方面的优选,所述s32中,空间、时间、通道注意力模块内部计算逻辑一致,公式如下:
[0042]
attention(q,k,v)=softmax(q
t
/k)v
[0043]
式中:attention表示计算得到的注意力向量。
[0044]
作为上述第一方面的优选,所述台风降水短临预测模型的输入为6个时刻的目标区域内降水格网数据和台风特征数据。
[0045]
作为上述第一方面的优选,所述台风特征为台风的中心气压和最大风速。
[0046]
第二方面,本发明提供了一种台风降水短临预测方法,其做法是将编码器-解码器结构的台风降水短临预测模型利用上述第一方面任一方案所述优化方法进行优化,经训练
后用于对台风降水进行短临预测。
[0047]
相对于现有技术而言,本发明的有益效果如下:
[0048]
本发明提供了一种台风降水短临预测模型优化方法,该方法结合了基于cross-patch多层语义注意力的降水长距离时空建模方法,采用cross-patch多层语义时空编码策略以及基于多层语义的时空注意力计算,通过长距离时空建模,提升模型对复杂天气系统大尺度高阶时空特征的理解。本发明方法针对大尺度场景下基于pixel-based时空注意力建模方式带来的庞大资源消耗问题,同时考虑表征大尺度天气系统时空演变模式的高阶时空特征的影响,实现了提高模型对长距离时空依赖的感知和建模能力,全面且有效的提升了降水强度预测的精度。同时,本发明能有效应对不同类型台风场景的降水短临预测,具有一定的泛化能力。因此,本发明对于台风降水短临预测的模型优化及快速应用具有重要的实际应用价值。
附图说明
[0049]
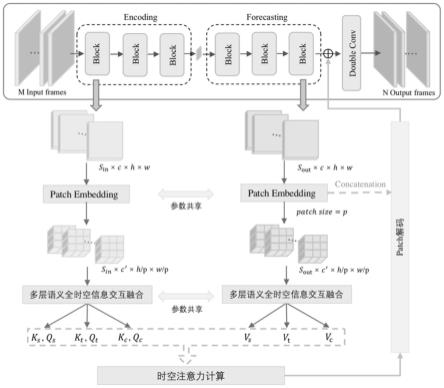
图1为基于cross-patch多层语义注意力的长距离时空建模流程图。
[0050]
图2为patch embedding流程图。
[0051]
图3为cross-patch多层语义全时空信息交互流程图。
[0052]
图4为时空注意力计算流程图。
具体实施方式
[0053]
下面结合附图和具体实施方式对本发明做进一步阐述和说明。
[0054]
在本发明的一个较佳实施例中,提供了一种台风降水短临预测模型优化方法,该方法用于对编码器-解码器结构的台风降水短临预测模型进行优化。该台风降水短临预测模型优化方法的主要步骤包括3步,分别为s1~s3:
[0055]
s1:获取待优化的台风降水短临预测模型中编码器和解码器各自的原始特征图,并对原始特征图进行区域划分并获取每个区域特征在高维特征空间的表征,使每个原始特征图分别形成对应的时空语义特征。patch embedding得到的特征图与原特征图相比,降低了空间维度,扩大了通道维度,通过压缩冗余细粒度降水信息获取原特征图在高维特征空间的高阶表达;
[0056]
s2:基于s1中patch embedding得到的时空语义特征pef进一步进行多层语义全时空信息交互,构建从时空语义特到具有全时空视野的多层语义时空特征,为后续时空注意力的计算提供具有全时空感受野的多尺度时空语义特征tcpf。
[0057]
s3:基于具有多层级语义全时空视野的多尺度时空语义特征tcpf,引入注意力机制构建空间、时间、通道三头注意力模块,开展降水长距离时空注意力计算,计算以块(patch)为单元的时空注意力。最终结果经过patch解码,通过残差结构与原始特征图进行融合,自适应增强六个预测时序时空特征表达。
[0058]
上述s1~s3所示的方法中,针对大尺度场景下基于全局像素点的时空注意力建模方式带来的庞大资源消耗问题,同时考虑表征大尺度天气系统时空演变模式的高阶时空特征的影响,设计了一种基于cross-patch多层语义注意力的长距离时空建模机制,其原理如图1所示。一方面,本发明针对高维时空场景中基于全局像素点注意力的庞大计算量,提出
了基于patch开展时空注意力计算。通过在特征图上进行patch划分和编码,聚合邻域信息获取基于patch的高阶特征表达。在压缩特征图中冗余细粒度信息的同时,大幅降低后续时空注意力计算的资源消耗。另一方面,为了进一步充分地提取并融合不同层级时空特征,为时空注意力的计算提供具有全时空视野的多尺度时空特征,本发明提出了cross-patch多层语义全时空信息交互模块,使后续时空注意力在计算过程中能够自适应地选取不同层级时空特征开展长距离建模。
[0059]
下面对本实施例中s1~s3的具体实现方式以及其效果进行详细描述。
[0060]
需要说明的是,理论上本发明中的优化对象台风降水短临预测模型可以是任意采用编码器-解码器结构的深度神经网络模型,只要该模型能够预测台风发生过程中的短临降水即可。
[0061]
在本发明的实施例中,上述台风降水短临预测模型包含编码器(执行encoding过程)和解码器(执行forecasting过程)。如图1所示,编码器中包含三个级联的block模块,每个block模块为一组级联的convolution层和convlstm层;解码器同样包含三个级联的block模块,每个block模块为一组级联的convlstm操作和deconvolution操作。解码器之后通过双层卷积进行最终输出,得到短临降水预测结果。
[0062]
在上述台风降水短临预测模型中,模型的输入需要是与台风降水相关的时序数据,本实施例中可选择为6个时刻的目标区域内降水格网数据和台风特征数据。其中台风特征数据中具体的台风特征可根据实际进行优化,本实施例中选择的台风特征为台风的中心气压和最大风速。输入模型的降水格网数据和台风特征数据均需要重采样至相同的空间参考和空间分辨率,这种多源输入需要进行融合,最简单直观的融合方法是将三个格网数据拼接(concatenation)起来,作为三通道特征输入编码器。另外,也可以在编码器中分别设置两个编码分支,一个编码分支用于输入降水格网数据,另一个编码分支用于输入台风特征数据(拼接中心气压和最大风速),两个编码分支的输出在通过拼接操作进行融合,融合结果作为解码器的输入。本实施例中,基于上述6个block模块组成的台风降水短临预测模型,可提取编码器中第一个block模块的六个时序特征图和解码器中最后一个block模块的六个预测时序特征图计算时空语义特征,且编码器中提取的时序特征图为convolution层输出的时序特征编码,用来构建自注意力机制中的键key(k)和值value(v),解码器中提取的预测时序特征图为convlstm层输出的预测时序特征,用来构建自注意力机制中的查询query(q)。
[0063]
在本发明实施例中,上述步骤s1中,针对原始台风降水短临预测模型中编码器和解码器各自的特征图,通过图2所示的patch embedding的方式,按照s11~s13进行处理:
[0064]
s11:针对每个原始尺寸为c
×h×
w的特征图进行区域划分,通过预设的p
×
p块大小(patch size)对空间区域进行规则划分并裁剪,获得h/p
×
w/p个块(patch)区域;
[0065]
s12:基于c
′
个维度为c
×
p
×
p的卷积核对每个块区域进行并行编码,其中c
′
》c,且为了保证每个块区域提取的模式保持一致,对所有块区域的编码卷积核进行参数共享,得到h/p
×
w/p个维度为c
′×1×
1的块区域特征图后重新组合为c
′×
h/p
×
w/p维度的时空语义特征;
[0066]
s14:上述patch embedding得到的特征图与原特征图相比,降低了空间维度,扩大了通道维度,通过压缩冗余细粒度降水信息获取原特征图在高维特征空间的高阶表达。基
于这一过程,六针对编码器的六个输入时序的特征图和解码器的六个预测时序的特征图,分别按照s11和s12转换得到维度为c
′×
h/p
×
w/p的时空语义特征。
[0067]
patch embedding得到的特征图与原特征图相比,降低了空间维度,扩大了通道维度,通过压缩冗余细粒度降水信息获取原特征图在高维特征空间的高阶表达。通过在特征图上进行patch划分,并编码每一时刻每一patch的区域表征,实现特征图压缩,大幅降低后续注意力计算过程的资源消耗。同时patch编码聚合了局部信息,模糊了低阶的细节特征并获取了基于patch的高阶特征表达,使时空注意力计算基于更高层级的时空特征展开,有助于模型捕获更高阶的全局时空演变模式。为了保证输入序列和输出序列的编码模式保持一致,二者在patch embedding过程中保持参数共享。patch embedding得到的特征图与原特征图相比,降低了空间维度,扩大了通道维度,通过压缩冗余细粒度降水信息获取原特征图在高维特征空间的高阶表达。基于这一过程,六个输入时序的特征图和六个预测时序的特征图可分别转换为六个维度为c
′×
h/p
×
w/p的基于patch的特征pef,为之后的全时空信息交互和时空注意力计算提供精炼且高效的时空语义特征。
[0068]
在本发明实施例中,上述步骤s2中,设计了一种cross-patch多层语义全时空信息交互流程,如图3所示,具体方法如下:
[0069]
s21:将编码器对应的六个时空语义特征和解码器对应的六个时空语义特征分别沿时间维度方向串接融合(concatenation),得到维度为(s
in
×c′
,h/p,w/p)和(s
out
×c′
,h/p,w/p)的两个时空特征cpf in
和cpf out
的初始值,初始值以下标0来表示,即;
[0070][0071][0072]
式中:concat表示串接融合操作;s
in
和s
out
分别表示编码器和解码器中的输入时序的特征图,本实施例中均为6。
[0073]
s22:采用多层堆叠深度可分离卷积(depthwise separable convolution,dsc),对s21中得到的初始时空特征cpf
in
和cpf
out
分别在空间和特征深度方向进行cross-patch的交叉卷积,第i层堆叠深度可分离卷积dsc的输出特征表示为cpfi。
[0074]
其中,每层堆叠深度可分离卷积包括depthwise(dw)卷积与pointwise(pw)卷积两层网络,每层堆叠深度可分离卷积dsc计算过程表示为:
[0075]
cpfi=dsc(cpf
i-1
)=pw(dw(cpf
i-1
))
[0076]
其中,cpfi表示第i层堆叠深度可分离卷积dsc的输出特征,pw卷积为特征图深度方向上的加权组合操作,其卷积核数等于输出通道数。
[0077]
s23:经过s22中共n层堆叠深度可分离卷积后得到n+1个特征图cpfi,i∈[0,n],分别表示从时空语义特征(patch embedding)到具有全局感受野的不同语义层级时空特征,再采用逐像素加和的方式将不同语义层级的时空特征进行加权融合。设n+1个特征的权重分别为λ0,λ1...λn,则最终得到多尺度时空语义特征tcpf为:
[0078][0079]
其中,λ0,λ1...λn表示n+1个特征图cpfi的权重,能够通过模型反向传播进行优化。
[0080]
s24:将多尺度时空语义特征按s21中采用的串联拼接方式逆向切分(split),得到分离后的具有全时空视野和各层级语义信息的各个时刻多尺度时空语义特征tcpfi,i∈[1,12]表示时刻,前六个时刻i∈[1,6]对应输入序列,后六个时刻i∈[7,12]对应输出序列。
[0081]
在本发明实施例中,上述步骤s3中,引入了一种时空注意力计算方式,如图4所示,具体方法如下:
[0082]
s31:首先采用两个1*1卷积convk和convv分别对六个输入时刻的多尺度时空语义特征tcpfi进行卷积,获取注意力机制的键key(k)和值value(v)特征,且同一种卷积操作在不同时刻之间参数共享,即不同时刻所用的卷积操作convk之间参数共享,不同时刻所用的卷积操作convv之间参数也共享。键key(k)和值value(v)特征的计算公式如下:
[0083]
k=convk(tcpf1,tcpf2…
tcpf6)
[0084]
v=convv(tcpf1,tcpf2…
tcpf6)
[0085]
同时,采用1*1卷积操作convq对六个输出序列的多尺度时空语义特征tcpfi进行卷积,获取注意力机制的查询query(q)特征,不同时刻所用的卷积操作convq彼此参数共享。query(q)特征的计算公式如下:
[0086]
q=convq(tcpf7tcpf8…
tcpf
12
)
[0087]
上述得到的k、q、v维度相同,均为(t,c,h,w)。
[0088]
s32:为了计算空间、时间、通道三种不同特征空间中的注意力,对k、q、v分别进行三种维度转换,得到维度分别为(t*c,h*w)、(c*h*w,t)、(t*h*w,c)的三组k、q、v;其中第一组k、q、v为ks、qs、vs,其维度为(t*c,h*w),用于空间注意力计算;第二组k、q、v为kt、qt、vt,其维度为(c*h*w,t),用于时间注意力计算;第三组k、q、v为kc、qc、vc,其维度为(t*h*w,c),用于通道注意力计算。
[0089]
空间、时间、通道注意力模块内部计算逻辑一致,公式如下:
[0090]
attention(q,k,v)=softmax(q
t
k)v
[0091]
式中:attention表示计算得到的注意力向量。
[0092]
经过空间注意、时间注意、通道注意力计算,分别得到注意力向量attention记为atts、att
t
和attc。
[0093]
s33:计算得到的空间注意力向量atts、时间注意力向量att
t
和通道注意力向量attc通过维度变换统一恢复至(t,c,h,w)维度,并结合权重系数采用逐像素加和方式进行加权融合,得到最终的时空注意力计算结果att
fusion
:
[0094][0095]
其中,att
re
表示维度变换后的att向量;权重系数α,β,γ能够通过模型反向传播进行优化。
[0096]
最终的时空注意力计算结果att
fusion
经过块(patch)解码后,将解码结果通过残差结构融合至台风降水短临预测模型中解码器输出的特征图中,以自适应增强六个预测时序时空特征表达。融合后的特征再输入模型中位于解码器后的双层卷积中,输出相应的台风降水短临预测结果。
[0097]
因此,将编码器-解码器结构的台风降水短临预测模型利用上述s1~s3所示的优化方法进行优化,再经模型训练后即可用于对台风降水进行短临预测。
[0098]
下面基于上述实施例s1~s3所示的优化方法,将其应用至具体的实例中对其效果进行展示。具体的过程如前所述,不再赘述,下面主要展示其具体参数设置和实现效果。
[0099]
实施例
[0100]
下面以西北太平洋地区的台风和2019年台风“夏浪”降水为具体实施例,对本发明进行具体描述,其具体步骤如下:
[0101]
1)使用的台风数据来自于国家气象中心中央气象台,包括从2017年-2019年西北太平洋地区的85个台风(图1.2)。台风数据的观测信息包括气旋位置、中心气压、移动风速、最大风速等。台风数据的空间分辨率为0.1
°
,观测间隔主要为3h和6h。随着台风强度增大,观察间隔会相应缩短,最小时间间隔为1h。基于时空匹配后的数据,采用滑动窗口法构建时空预测序列样本,并在此基础上进一步筛选并划分台风降水数据集。
[0102]
2)由于观测序列为过去3小时(6帧)数据,预测序列为未来3小时(6帧)数据,因此滑动窗口长度设置为6小时(12帧)。为了获得尽可能多的样本,同时规避数据泄露问题,滑动窗口移动步长设置为2h(4帧)。基于滑动窗口法对匹配后的时序数据进行采样,最终获得一系列序列长度为6小时的降水序列样本。
[0103]
3)对上一步的降水序列样本进行筛选,删除没有台风事件的降水序列。此外,当台风处于初期形成或末期消亡阶段时,降水序列样本中的观测序列(前6帧)中有台风标记的时刻可能少于6帧,为了保证样本有足够的的台风标记用于后期台风信息融合和时空推理图建模过程,本文进一步删除观测序列(前6帧)台风标记时刻少于3的序列样本,最终得到4581个序列样本。
[0104]
4)将第二步的得到的序列样本按照10:1:2的比例完全随机划分为训练数据集,验证数据集和测试数据集。将划分后的台风降水数据集称为tcpd(tropical cyclone precipitation dataset),并基于此数据集开展相关实验;
[0105]
5)按照前述的步骤,利用tcpd数据集进行模型训练和实验验证。
[0106]
将本发明的重构方法命名为convlstm+mcpa,其相比原有的经典convlstm方法csi分别提升了1.06%(m=0.5)、1.83%(m=2)、2.63%(m=5)、3.17%(m=10)、3.52%(m=20)、3.77%(m=30),hss分别提升了0.79%(m=0.5)、1.73%(m=2)、3.02%(m=5)、4.14%(m=10)、5.17%(m=20)、5.87%(m=30),f1分别提升了0.99%(m=0.5)、1.9%(m=2)、3.12%(m=5)、4.19%(m=10)、5.19%(m=20)、5.88%(m=30)。精度提升幅度表现出随降水强度增大而增大的特点。这是因为增加了多层语义全时空信息交互模块的mcpa模型进一步充分地提取并融合了不同层级时空特征,为时空注意力的计算提供了具有全时空视野的多尺度时空特征,在时空注意力的计算过程中保证模型能够自适应地选取合理语义层级的时空特征信息进行长距离建模,最终提升模型的预测能力。实验结果也验证了本发明所提出的长距离建模方法的有效性和优越性。
[0107]
以上所述的实施例只是本发明的一种较佳的方案,然其并非用以限制本发明。有关技术领域的普通技术人员,在不脱离本发明的精神和范围的情况下,还可以做出各种变化和变型。因此凡采取等同替换或等效变换的方式所获得的技术方案,均落在本发明的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1