一种装液罐校准方法与流程
1.本发明涉及计量校准领域,具体涉及一种装液罐校准方法。
背景技术:
2.在生物医药领域内,常用到各类型尺寸的料罐进行各类药剂、试剂、液体的存放,简称为装液罐。装液罐使用过程中需要装载重量进行称重,通常在装液罐的罐脚底部连接称重传感器进行称重。为了保证装液罐的装载重量称重准确可靠,需要对其称重系统进行校准。公知的,砝码标定是公认的最受计量认可的校准标定方式,但是在装液罐的校准过程中较难适用。因为常用的装液罐小到几百上千公斤,大到几吨上百吨,且装液罐上没有可以悬挂砝码的位置,只能将砝码搬运放在装液罐内部,需要人工搬运吨位重量的砝码,耗费大量人力资源。也有采用物料替代后转移称重等方法,但是不仅费时费力,而且成本高昂、精度不高。现有技术cn208672132u提供了一种在罐脚与地面之间连接施力结构,通过液压施力配合拉力传感器进行称重校准的技术,但是该技术的液压结构需要较大的安装高度空间,适用于中大型料罐的称重校准,对于小型装液罐,则由于罐脚高度空间不足,难以进行称重校准。
技术实现要素:
3.本发明意在提供一种装液罐校准方法,以解决现有技术中对装液罐的称重校准通过砝码费时费力难以进行,通过液压只适用于中大型装液罐,无法对小型装液罐进行称重校准的问题。
4.为达到上述目的,本发明采用如下技术方案:一种装液罐校准方法,包括以下步骤:
5.a、在装液罐上安装施力连接结构;
6.b、在装液罐外侧的地面上固定连接施力校准机构,将施力校准机构的顶端与施力连接机构连接;
7.c、对施力校准机构及装液罐的罐脚处称重传感器进行清零处理;
8.d、通过施力校准机构在装液罐与地面之间施加拉力,施力校准机构对施加的拉力进行测量,装液罐的罐脚处称重传感器对受到拉力的装液罐进行称重检测;
9.e、将施力校准机构测量的拉力与称重传感器测得的数据进行比较核对,完成对装液罐的称重校准。
10.优选的,作为一种改进,步骤a中从上至下在装液罐上罩覆铁索制成的拉网作为施力连接结构,拉网底端沿装液罐周向均匀分布多个拉环。
11.优选的,作为一种改进,步骤a中在装液罐的罐脚之间焊接多根横梁作为施力连接结构,在多根横梁的底部焊接多个均匀分布的拉环。
12.优选的,作为一种改进,步骤b中用从上至下依次连接的u型座、施力组件、u型座、拉力传感器、h型座组成施力校准机构,在装液罐的罐脚外侧的地面上预埋设拉环,位于顶
端的u型座与施力连接机构连接,位于底端的h型座与地面预埋的拉环连接。
13.优选的,作为一种改进,步骤b中用液压缸作为施力组件,液压缸的上、下两端分别与一个u型座连接。
14.优选的,作为一种改进,步骤b中施力组件采用两个拉板,两个拉板之间穿设有多个螺纹杆,螺纹杆位于拉板外侧的端部连接有螺母,两个拉板的中部均连接有拉杆,拉杆位于拉板内侧的端部连接有螺母,两个拉杆分别与一个u型座连接。
15.优选的,作为一种改进,步骤d中用拉力传感器对拉力进行测量,拉力传感器电连接显示器以显示拉力数值,称重传感器测得数据用plc处理后输出为与拉力传感器输出拉力数值同单位的称重数值。
16.优选的,作为一种改进,步骤e中如拉力数值与称重数值相同则装液罐称重准确,如拉力数值与称重数值存在差异则装液罐称重存在偏差。
17.本方案的原理及优点是:实际应用时,罐脚与地面之间的称重传感器作为装液罐自身的称重系统,称重传感器电连接plc将称重信息输出。本发明通过在装液罐上连接施力校准机构和施力连接结构,通过施力连接结构施加拉力,并通过拉力传感器进行拉力监测,通过对监测的拉力与称重传感器监测的称重信息进行比较即可对装液罐进行称重校准。本发明中,对装液罐的施力连接结构进行多种设计,对于大中型装液罐可采用罐脚上设置耳板或罐脚之间设置施力架的方式,对于小型装液罐,则采用罩覆在装液罐上的拉网,通过从装液罐上部罩覆的拉网,可控制拉网底端的高度,进而满足施力校准机构所需的空间高度,从而能够有效对小型装液罐进行称重校准。对于施力校准机构,施力的方式设计了液压缸的方式,自动化程度高,施力便捷高效,也设计了通过拉板、拉杆、螺纹杆的方式,能够通过手动调节两个拉板之间的距离来施力,使用稳定可靠。通过本发明的技术方案,能够对不同大小的装液罐进行称重校准,校准过程便捷省力,解决现有技术中对装液罐的称重校准通过砝码费时费力难以进行,通过液压只适用于中大型装液罐,无法对小型装液罐进行称重校准的问题。
附图说明
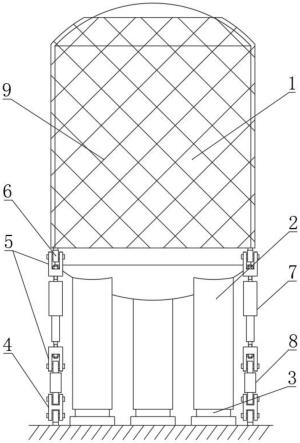
18.图1为本发明实施例1的结构示意图。
19.图2为本发明实施例2的结构示意图。
20.图3为本发明实施例3的结构示意图。
具体实施方式
21.下面通过具体实施方式进一步详细说明:
22.说明书附图中的附图标记包括:装液罐1、罐脚2、称重传感器3、h型座4、u型座5、拉环6、液压缸7、拉力传感器8、拉网9、横梁10、拉板12、拉杆13、螺纹杆14。
23.实施例1,一种装液罐校准方法,包括以下步骤:
24.a、在装液罐1上安装施力连接结构,结合图1所示,从上至下在装液罐1上罩覆铁索制成的拉网9作为施力连接结构,拉网9底端沿装液罐1周向均匀分布三个拉环6;
25.b、在装液罐1外侧的地面上固定连接施力校准机构,用从上至下依次连接的u型座5、施力组件、u型座5、拉力传感器8、h型座4组成施力校准机构,用液压缸7作为施力组件,液
压缸7的上、下两端分别与一个u型座5连接,在装液罐1的罐脚2外侧的地面上预埋拉环6,将施力校准机构顶端的u型座5与拉网9底端的拉环6用销杆连接,位于底端的h型座4与地面预埋的拉环6用销杆连接;
26.c、对施力校准机构及装液罐1的罐脚2处称重传感器3进行清零处理;
27.d、通过施力校准机构在装液罐1与地面之间施加拉力,施力校准机构用拉力传感器8对施加的拉力进行测量,拉力传感器8电连接显示器以显示拉力数值,装液罐1的罐脚2处称重传感器3对受到拉力的装液罐1进行称重检测,称重传感器3测得数据用plc处理后输出为与拉力传感器8输出拉力数值同单位的称重数值;
28.e、将施力校准机构测量的拉力与称重传感器3测得的数据进行比较核对,如拉力数值与称重数值相同则装液罐1称重准确,如拉力数值与称重数值存在差异则装液罐1称重存在偏差,完成对装液罐1的称重校准。
29.实施例2,本实施例与实施例1的区别仅在于,结合图2所示,步骤a中在装液罐1的罐脚2之间焊接多根横梁10作为施力连接结构,在多根横梁10的底部焊接三个均匀分布的拉环6,步骤b中将施力校准机构顶端的u型座5与横梁底端的拉环6用销杆连接。
30.实施例3,本实施例与实施例1的区别仅在于,结合图3所示,步骤b中施力组件采用两个拉板12,两个拉板12之间穿设有四个螺纹杆14,螺纹杆14位于拉板12外侧的端部连接有螺母,两个拉板12的中部均连接有拉杆13,拉杆13位于拉板12内侧的端部连接有螺母,两个拉杆13分别与一个u型座5连接。本实施例中在步骤d中通过对螺纹杆14上的螺母进行调节,使得两个拉板12之间的距离缩小,螺母对螺纹杆14的调节产生的拉力通过拉杆13作用在拉力传感器8和拉网9上。
31.以上所述的仅是本发明的实施例,方案中公知的具体技术方案和/或特性等常识在此未作过多描述。应当指出,对于本领域的技术人员来说,在不脱离本发明技术方案的前提下,还可以作出若干变形和改进,这些也应该视为本发明的保护范围,这些都不会影响本发明实施的效果和专利的实用性。本技术要求的保护范围应当以其权利要求的内容为准,说明书中的具体实施方式等记载可以用于解释权利要求的内容。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1