一种离合器滑移件位置的电涡流阵列测量装置及方法与流程
1.本发明属于离合器滑移件的定位技术领域。
背景技术:
2.常规的非接触位移测量传感器如电涡流位移传感器,需要布置在轴向上,并且探测距离越长传感器的直径和长度越大。离合滑移件既有连续旋转运动也有几十毫米级的轴向滑移运动,并且位于连续旋转的输入组件与输出组件之间。测量传感器的安装空间只能是径向空间,如轴向布置位移传感器只能增加离合器长度来容纳,使离合器体积重量加大、高速动态性能下降,因此离合滑移件轴向位移的非接触测量存在较大困难。
3.目前,确定离合器滑移件位置的非接触测量装置通常采用在离合器滑移件的接合、脱开位置设置两个小型电涡流接近开关的方法。当离合器滑移件处于接合位置时,接合指示接近开关输出有效信号;当离合器滑移件处于脱开位置时,脱开指示接近开关输出有效信号;当离合器滑移件处于接合、脱开的中间位置时,两个接近开关均没有有效信号输出,不能确定离合器滑移件的具体位置和运动状态;当离合器出现故障时,也无法根据离合器滑移件的位置确定故障范围。即现有离合器滑移件位置的非接触测量装置测量范围有限。
技术实现要素:
4.本发明是为了解决现有离合器滑移件位置的非接触测量装置仅能够测量离合器滑移件处于脱开位置或接合位置,而无法测量其他位置及状态的问题,现提供一种离合器滑移件位置的电涡流阵列测量装置及方法。
5.一种离合器滑移件位置的电涡流阵列测量装置,包括:测量盘600、测量头100和信号处理器700,所述测量盘600固定在离合器的滑移件20上,所述测量头100固定在离合器的罩壳40上;
6.所述测量头100包括m
×
n个微型电涡流接近开关400和电连接器200,所述m
×
n个微型电涡流接近开关400的探头410呈m行n列的矩形阵列方式排布,相邻两个探头410的行和列间距均为s,且相邻两行的端部列间距相差s/m,所述m
×
n个微型电涡流接近开关400的电缆420均通过所述电连接器200与所述信号处理器700电气连接,m和n均为正整数,
7.当测量盘600运动到第k
i,j
个微型电涡流接近开关400的检测范围时,该微型电涡流接近开关400通过所述电连接器200向所述信号处理器700发出有效信号,
8.所述信号处理器700,用于记录每个有效信号的发出时刻,并计算每个有效信号发出时刻滑移件20的位移,还用于将每个有效信号的发出时刻与其对应的位移构成位置测量曲线800。
9.进一步的,通过下式计算t
i,j
时刻滑移件20的位移l
i,j
:
10.11.其中,i=1,2,...,m,j=1,2,...,n。
12.进一步的,上述一种离合器滑移件位置的电涡流阵列测量装置还包括:安装板300、支架310和底座320,所述底座320固定在离合器的罩壳40外部,所述安装板300通过所述支架310与底座320固定连接,
13.所述安装板300上开有m
×
n个用于放置探头410的安装孔,
14.所述安装板300的材料为低导磁材料或非导磁材料。
15.进一步的,上述安装板300的材料为铝合金或工程塑料。
16.进一步的,上述测量盘600包括工作部分610和固定部分620,
17.所述工作部分610位于所述固定部分620的端部,
18.所述工作部分610的材料为导磁材料。
19.进一步的,上述工作部分610的材料为钢、软钢或铁氧体。
20.进一步的,上述工作部分610的厚度为h、宽度为b,探头410的端部直径为d,
21.则有:h≥2d,b≤d,
22.所述宽度为m
×
n个微型电涡流接近开关400构成阵列的列排布方向。
23.一种离合器滑移件位置的电涡流阵列测量方法,所述电涡流阵列测量方法基于上述一种离合器滑移件位置的电涡流阵列测量装置实现,所述电涡流阵列测量方法具体步骤为:
24.启动离合器使得滑移件20开始运动,
25.当信号处理器700接收到有效信号时,记录当前时刻以及检测到测量盘600的微型电涡流接近开关400所在行列位置,并根据微型电涡流接近开关400所在行列位置计算当前时刻测量盘600的位移。
26.本发明专利的有益效果是:
27.本发明能够实现滑移件位置毫米级的测量,有利于离合器滑移件运动状态的对比分析,当离合器出现故障时,可根据离合器滑移件的位置位移快速确定故障范围。
附图说明
28.图1为现有离合器滑移件位置接近开关测量机构的剖视图;
29.图2为现有离合器滑移件处于2个电涡流接近开关中间位置的剖视图;
30.图3和图4均为现有离合器中电涡流接近开关的工作原理图,其中图3表示断开状态,图4表示导通状态;
31.图5为现有离合器滑移件位移-时间的理论曲线图;
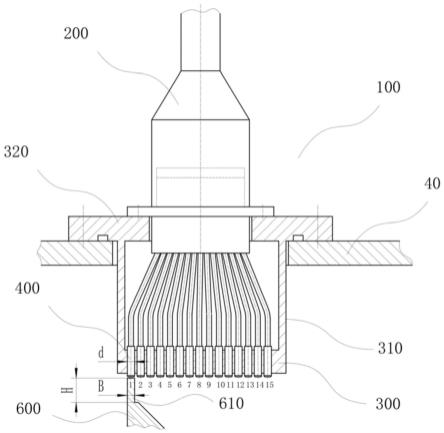
32.图6和图7均为本发明中测量头与离合器配合状态的剖视图,其中图6表示滑移件处于脱开位置,图7表示滑移件处于中间位置;
33.图8为测量头的主剖视图;
34.图9为图8的仰视图;
35.图10为图9的左剖视图;
36.图11为本发明电气原理框图;
37.图12为本发明测得的离合器滑移件位移-时间的测量曲线图;
38.图13为离合器滑移件位移-时间的理论曲线与测量曲线整体对比图;
39.图14为离合器滑移件位移-时间的理论曲线与测量曲线细节对比图;
40.图15为测量头微型接近开关阵列的扩展排列图。
41.图中,输入组件10,滑移件20,输出组件30,罩壳40,测量机构50,接合指示接近开关52,脱开指示接近开54,测量头100,电连接器200,安装板300,支架310,底座320,微型电涡流接近开关400,探头410,电缆420,测量盘600,工作部分610,固定部分620,信号处理器700,测量曲线800,测量曲线误差805,理论曲线820,简单拟合曲线830,简单拟合曲线误差835。
具体实施方式
42.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动的前提下所获得的所有其它实施例,都属于本发明保护的范围。需要说明的是,在不冲突的情况下,本发明中的实施例及实施例中的特征可以相互组合。
43.如图1和图2所示,现有离合器滑移件位置的测量机构50安装在静止不动的罩壳40上,离合器的输入组件10和输出组件30运动形式为连续旋转运动,在离合器接合脱开过程中滑移件20的运动形式为螺旋运动,即旋转运动和轴向运动的复合运动,测量盘600固联在滑移件20上,随滑移件20同步运动,接合指示接近开关52和脱开指示接近开关54分别固联在测量机构50的特定位置上,当离合器滑移件20处于接合位置时,接合指示接近开关52输出有效信号,当离合器滑移件处于脱开位置时,脱开指示接近开关54输出有效信号,当离合器滑移件20处于接合、脱开的中间位置时,两个接近开关均没有有效信号输出,此时不能确定滑移件20的具体位置,当离合器出现故障时,也无法根据离合器滑移件的位置确定故障范围。
44.在图3和图4中,微型电涡流接近开关的工作原理为:导磁材料制成的测量盘600远离微型电涡流接近开关400时,其信号端bk输出电压ubk=0;测量盘600靠近微型电涡流接近开关400时,其信号端bk输出电压ubk=u;按一定的扫描时间周期不断检测电压值ubk,就可以判断出测量盘600与微型电涡流接近开关400靠近的时刻。
45.在图5中,粗实线l'(t)表示离合器滑移件位移-时间的理论曲线或真实曲线820,细虚线表示离合器滑移件位移-时间的简单拟合曲线830,细虚线是根据接合指示接近开关52和脱开指示接近开关54有效信号的间隔时间拟合而来,即假设离合器滑移件为匀速直线运动,细虚线的导数或斜率为离合器滑移件运动速度,细虚线与粗实线的偏离距离代表测量机构50位移测量误差即简单拟合曲线误差835。可见在位移为13.5s测量长度上,现有的离合器滑移件位置测量机构测得的简单拟合曲线误差835为1.98s绝对误差,相对误差为14.67%,s为位移的计量单位。
46.具体实施方式一:参照图6至11具体说明本实施方式,本实施方式所述的一种离合器滑移件位置的电涡流阵列测量装置,包括:安装板300、支架310、底座320、测量盘600、测量头100和信号处理器700。所述测量盘600固定在离合器的滑移件20上并能够随滑移件20移动。所述底座320固定在离合器的罩壳40外部,安装板300上开有m
×
n个呈m行n列矩形阵列方式排布的安装孔,所述安装板300通过所述支架310与底座320固定连接。所述安装板
300的材料为低导磁材料或非导磁材料。优选的,安装板300的材料为铝合金或工程塑料。
47.测量头100包括m
×
n个微型电涡流接近开关400和电连接器200。所述m
×
n个微型电涡流接近开关400的探头410分别与m
×
n个安装孔一一对应并嵌固在对应安装孔中、并伸出一段距离。相邻两个探头410的行和列间距均为s,且相邻两行的端部列间距相差sm。所述m
×
n个微型电涡流接近开关400的电缆420均通过所述电连接器200与所述信号处理器700电气连接,m和n均为正整数。
48.测量盘600包括工作部分610和固定部分620。所述工作部分610位于所述固定部分620的端部。所述工作部分610的厚度为h、宽度为b,探头410的端部直径为d(s>d),则有:h≥2d,b≤d,所述宽度为m
×
n个微型电涡流接近开关400构成阵列的列排布方向。所述工作部分610的材料为导磁材料。优选的,工作部分610的材料为钢、软钢或铁氧体。
49.当测量盘600运动到第k
i,j
个微型电涡流接近开关400的检测范围时,该微型电涡流接近开关400通过所述电连接器200向所述信号处理器700发出有效信号。
50.所述信号处理器700用于记录每个有效信号的发出时刻,并计算每个有效信号发出时刻滑移件20的位移。具体的,通过下式计算t
i,j
时刻滑移件20的位移l
i,j
:
[0051][0052]
其中,i=1,2,...,m,j=1,2,...,n。本实施方式中,对微型电涡流接近开关400进行标记,则通过标记的i和j即可确定所在位置。
[0053]
所述信号处理器700还用于将每个有效信号的发出时刻与其对应的位移构成位置测量曲线800。
[0054]
本实施方式中微型电涡流接近开关400的物理分辨率为s/m,即测量盘600移动s/m时,相邻的2个微型电涡流接近开关400必然有一个会发出有效信号。在圆周方向,每一行的微型电涡流接近开关400与测量盘600同心布置,与测量盘600外径r的间距均为u,测量盘600与每一个微型电涡流接近开关400为非接触。测量头(100)通过底座320机械连接在离合器的罩壳40上,可以进行拆装及调节径向间距u。电连接器200安装在底座320上,支架310联接安装板300与底座320使安装板300得到支撑和固定,电连接器200与每个微型电涡流接近开关400的电缆420电联接,即每个微型电涡流接近开关400的有效信号通过电连接器200对外输出,电连接器200的一个具体实施例为航空插头。
[0055]
下面给出一种实际应用时各参数的优选值:d=3mm,m=4mm,n=15mm,s=4mm。
[0056]
具体实施方式二:本实施方式所述的一种离合器滑移件位置的电涡流阵列测量方法,所述电涡流阵列测量方法基于上述具体实施方式一所述一种离合器滑移件位置的电涡流阵列测量装置实现。
[0057]
所述电涡流阵列测量方法具体步骤为:
[0058]
启动离合器使得滑移件20开始运动,
[0059]
当信号处理器700接收到有效信号时,记录当前时刻以及检测到测量盘600的微型电涡流接近开关400所在行列位置,并根据微型电涡流接近开关400所在行列位置计算当前时刻测量盘600的位移。
[0060]
通过下式计算t
i,j
时刻滑移件20的位移l
i,j
:
[0061][0062]
其中,i=1,2,...,m,j=1,2,...,n,m和n分别为微型电涡流接近开关400构成的矩形阵列的行列数,s为相邻两个探头410行列间距。
[0063]
如图12图至14所示,离合器滑移件位置的测量曲线800由l
i,j
和t
i,j
之间的m
×
n-1个折线段组成,l(t)与离合器滑移件位移-时间的理论曲线或真实曲线820l'(t)存在测量曲线误差805,图14的具体实施例中测量曲线误差805的绝对误差=0.13s,相对误差为0.963%。
[0064]
图15中,当大型离合器滑移件位移较长时,可以增加微型电涡流接近开关400阵列的列数n,扩大本发明专利的测量范围,也可以增加微型电涡流接近开关400阵列的行数m,提高本发明专利的测量精度。
[0065]
虽然在本文中参照了特定的实施方式来描述本发明,但是应该理解的是,这些实施例仅仅是本发明的原理和应用的示例。因此应该理解的是,可以对示例性的实施例进行许多修改,并且可以设计出其他的布置,只要不偏离所附权利要求所限定的本发明的精神和范围。应该理解的是,可以通过不同于原始权利要求所描述的方式来结合不同的从属权利要求和本文中所述的特征。还可以理解的是,结合单独实施例所描述的特征可以使用在其它所述实施例中。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1