一种基于差分定位与惯性导航的目标检测方法及系统与流程
1.本发明提供一种基于差分定位与惯性导航的目标检测方法及系统,属于差分定位与惯性导航的目标检测技术领域。
背景技术:
2.低慢小目标是指在低空或者超低空领域飞行速度较慢的小型飞行目标,例如无人机等航空器,由于缺乏有效技术手段进行监控,导致针对无人机的监管明显滞后,针对无人机等航空器的监控与反制力度不足;尽管部分无人机企业在其产品中为无人机飞行划定了禁飞区域,但仅限部分区域,随着近年来无人机普及程度越来越高,人们在出行时出于各种目的,通过购买零件对无人机现有功能进行改装,没有经过飞行及安全培训就在各种禁飞区域放飞无人机,近来也出现了多次的安全事故,但目前针对无人机的管控很难做到面面俱到,尤其在复杂恶劣的环境中对目标探测更加困难,除了从源头抓起,也需要针对无人机目标的检测系统和检测方法进行改进。
技术实现要素:
3.本发明为了克服现有技术中存在的不足,所要解决的技术问题为:提供一种基于差分定位与惯性导航的目标检测方法及检测系统硬件结构的改进。
4.为了解决上述技术问题,本发明采用的技术方案为:一种基于差分定位与惯性导航的目标检测方法,包括如下检测步骤:
5.步骤一:分别在控制室内设置终端显控系统,在检测现场设置雷达的信号处理机,所述终端显控系统通过与信号处理机的通信接口对接实现对雷达工作参数的预置,并对伺服驱动系统发送控制指令及进行状态监控,通过设置伺服驱动系统实现天线方位转动控制以及为信号处理提供方位编码;
6.设置的信号处理机用于产生雷达工作所需的cpi、prf时序信号,并完成回波的数字检测;
7.设置用于产生发射所需的射频小信号以及接收本振信号的频率综合模块;
8.设置用于放大发射信号功率以及混频接收目标回波信号的固态收发模块;
9.设置二次电源用于进行电源变换,为信号处理机和收发分系统提供工作电源;
10.步骤二:控制信号处理机上电,由终端显控系统发出雷达工作的状态查询指令,用于查看所有设备的工作状态:
11.当系统检测异常时,系统将自动定位出现故障的环节,并在终端显控系统上予以显示,提醒操作人员进行维修干预操作;
12.当系统检测正常时,系统将自动进入雷达默认的工作模式,对关心区域进行侦查;
13.步骤三:进入工作模式后,由终端显控系统向信号处理机发送雷达工作参数,信号处理机按照要求产生指定的工作时序命令并发送至收发分系统,收发分系统中的频率综合模块根据信号处理机提供的时序信号以及工作频率控制信息,产生射频激励信号并发送至
固态收发模块进行功率放大,然后将放大后的信号发送至平面阵列天线,通过平面阵列天线向外界辐射发出雷达探测信号;
14.步骤四:雷达探测信号发送至目标后产生回波信号,回波信号经平面阵列天线接收形成方位和、方位差、俯仰差三路信号,三路信号分别经过固态收发模块内置的环形器、限幅器、低噪声放大器、混频器、中频放大器后发送至信号处理机;
15.信号处理机对三路中频信号进行a/d变换、数字下变频处理后,然后进行脉压、mtd、恒虚警、杂波图处理,并进行门限判决,对过门限的信号进行距离、方位、幅度、时间的分析处理最终形成目标信息,然后信号处理机将目标信息发送至终端显控系统进行显示。
16.所述步骤四中针对信号进行杂波图处理的具体步骤为:
17.步骤4.1:考虑地物杂波对信号的影响,所述地物杂波的雷达反射截面积计算公式为:
18.σc=rθaz(cτ/2)(σ0/lp);
19.式中:r为距离,θaz为方位波束3db宽度,取5.2
°
,τ为压缩后的脉冲宽度,c为光速,σ0为地面反射系数,x波段取-20db,lp=1.33db为波束形状损失;
20.基于上式计算得到在不同距离下地物杂波的雷达反射截面积的数据对信号进行处理;
21.步骤4.2:考虑气象杂波对信号的影响,所述气象杂波的雷达反射截面积计算公式为:
22.σc=rθazrθel(cτ/2)η;
23.式中:θaz为方位波束3db宽度,取5.2
°
,θel为仰角波束3db宽度,取8
°
,η为反射效率,r为距离,τ为脉冲宽度,c为光速;
24.上式中反射效率的计算公式为:
25.η=6
×
10-14
×r1.6
×
λ-4
;
26.式中:r为雨量,λ为雷达波长,雷达波长λ取0.028m;
27.基于上式计算得到在不同距离下气象杂波的雷达反射截面积的数据对信号进行处理;
28.步骤4.3:基于地物杂波和气象杂波数据改善因子,改善因子的计算公式为:
[0029][0030]
式中:和σ
t
分别为杂波雷达反射面强度和目标雷达反射面强度,do为检测因子;
[0031]
定义当改善因子i的计算结果不小于52db时,能满足使用要求。
[0032]
一种基于差分定位与惯性导航的目标检测系统,包括设置在控制室内的终端显控系统、设置在检测现场的信号处理机,所述信号处理机通过导线分别与伺服驱动系统、收发分系统相连,所述收发分系统内部设置有频率综合模块和固态收发模块,所述频率综合模块通过导线与固态收发模块相连,所述频率综合模块通过导线与信号处理机相连,所述固态收发模块通过导线与平面阵列天线相连;
[0033]
所述信号处理机、收发分系统的电源输入端均与二次电源模块相连;
[0034]
所述信号处理机还通过导线与伺服驱动系统相连。
[0035]
本发明相对于现有技术具备的有益效果为:本发明提供一套专门用于监控锁定无人机空中目标的雷达检测系统,通过终端控制系统对雷达的信号处理装置进行远程控制,向雷达天线发送检测指令,使其向目标发射探测信号,并对接收到的目标回波信号进行分析处理,在排除地物气象等干扰因素的同时对回波信号进行修正,最终得到目标准确的距离、方位、幅度、时间等信息;本发明提供的目标自动检测系统设计满足技术指标,风险可控,具有良好的可实现性,并且该系统在探测目标时不受恶劣天气或地质影响,并具备在复杂电磁环境中的数据处理能力;本发明提供的检测系统具备低风险、低成本、高可靠性等优势,可以提升目标检测系统的环境适应性、电磁兼容性、可靠性及自维护能力。
附图说明
[0036]
下面结合附图对本发明做进一步说明:
[0037]
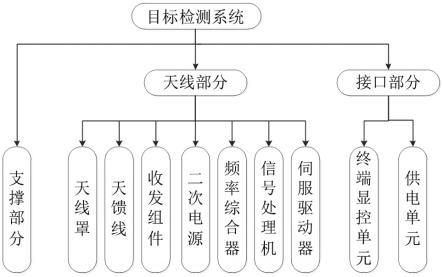
图1为本发明目标检测系统的硬件构成示意图;
[0038]
图2为本发明目标检测系统的电路结构原理图;
[0039]
图3为本发明雷达扫描方位的示意图;
[0040]
图4为本发明雷达威力覆盖的示意图;
[0041]
图5为本发明针对地杂波和气象杂波反射面积与距离的关系示意图;
[0042]
图6为本发明监视雷达的组网结构示意图。
具体实施方式
[0043]
本发明将gnss差分定位与惯性导航技术进行组合,提供一种基于gnss与惯性导航组合系统在复杂环境下对目标进行检测的方法,主要通过雷达进行低慢小目标的探测,通过光学视频系统进行目标锁定,并在确定目标具体三维坐标以后进行反制;该目标检测系统主要包括远距离探测空中目标的脉冲多普勒多坐标雷达,基于全方位频谱探测方法和飞手探测锁定方法,实现在一定距离(6公里)以上即可以探测到飞行物,并在中短距离(1.5公里与3公里)之间识别出飞行物,目标检测系统采用远程光电摄像机跟踪识别方法在近距离(1.5公里范围内)锁定目标,整个过程基于上位机提供的终端显控系统对检测数据进行分析处理。
[0044]
如图1所示,本发明提供的目标检测系统具体为一种便携式、多用途近程监视雷达,可以将其用于对地面人员、车辆、或者对无人机的探测,监视雷达主要由支撑部分、天线部分和接口设备组成,支撑部分根据安装形式的不同可以选择三脚架支撑,也可以选择地面固定的支撑方式,天线部分包含天线罩、平面阵列天线、频率综合模块、全固态收发模块、信号处理机、二次电源以及伺服驱动器等部件,接口设备包括供电单元和终端显控单元。
[0045]
本发明使用的监视雷达具体为采用方位/俯仰机械扫描,单笔形波束发射,方位接收的单脉冲三坐标雷达,雷达采用交流220v 50hz供电,天线内部包含用于提供电源转换的二次电源。
[0046]
如图2所示,本发明终端显控系统通过与信号处理机的通信接口实现对雷达工作参数的预置、并实现对伺服驱动的指令控制及状态监控;信号处理机用于产生雷达工作所
需的cpi、prf等时序信号,并完成回波的数字检测功能;频率综合模块用于产生发射所需的射频小信号以及接收本振信号;固态收发模块实现发射信号的功率放大以及目标回波信号的混频接收等功能;伺服系统用于实现天线方位转动控制以及为信号处理提供方位编码信号;二次电源用于进行电源变换,为信号处理以及收发分系统提供所需的工作电源。
[0047]
雷达上电后,首先由终端显控系统发出雷达工作的状态查询指令,用于查看所有设备的工作状态,当设备存在异常时,系统将自动定位可能出现故障的环节,并在终端的有关界面上予以显示,提醒操作人员进行维修干预等操作;当系统检测正常时,即可自动进入雷达默认的工作模式,实现对关心区域的侦查。
[0048]
进入正常工作状态时,首先由终端显控系统向信号处理机发送雷达工作参数,信号处理机按照要求产生指定的工作时序等命令并送至收发分系统,收发分系统中的频率综合模块根据信处提供的时序信号以及工作频率控制等信息,产生射频激励信号,并送至固态收发模块进行功率放大,将放大后的信号送至平面阵列天线端,通过天线向外界辐射出去;目标回波信号经平面阵列天线接收形成方位和、方位差、俯仰差三路信号,三路信号分别经过固态收发模块的环形器、限幅器、低噪声放大器、混频器、中频放大器后送到信号处理机,信号处理机对三路中频信号进行a/d变换、数字下变频处理后,然后进行脉压、mtd、恒虚警、杂波图等处理,进行门限判决,对过门限的信号进行距离、方位、幅度、时间的相关处理,形成目标信息,并将该信息报送到雷达终端显示计算机,在终端进行显示。
[0049]
本发明针对雷达频段的选择:
[0050]
选择雷达工作频段时,应综合考虑雷达探测能力的要求、工程可实现性以及雷达设备分配的频段等主要因素,为保证雷达的探测威力,其工作频段选择为x波段,该频率下能够较好地折中雷达的探测威力、测量精度及天线尺寸;在工程可实现性上,要对研制的周期和成本进行分析,综合确定可能选择的频率范围;综合上述多种因素,本发明采用的雷达工作频段选择在x波段,频率为10.38~10.48ghz。
[0051]
针对信号传输形式的选择:
[0052]
采用大时宽带宽积的信号提高发射机平均功率、脉冲压缩来保证距离分辨率是最常用的方法,因此本技术针对雷达采用大时宽调频脉冲压缩体制,调频脉冲采用线性调频形式;为了兼顾最小可检测距离和雷达威力,选用长、短两种宽度的信号形式,其中长脉冲信号采用线性调频形式,实现对中远区目标的搜索,短脉冲信号采用简单脉冲形式,可以完成近区目标的搜索;本发明选择的长脉冲的设计探测范围为4km-12km,短脉冲的设计探测范围为75m-4.5km。
[0053]
针对雷达扫描方位的选择:
[0054]
为了实现检测方位360
°
全覆盖的要求,可供选择的主要有方位机械扫描和方位电扫描两种体制,在方位伺服驱动系统的控制下实现方位扫略,完成关心区域的探测功能,本发明雷达选用方位机械扫描的方案,方位扫描示意图如图3所示;本发明提供的雷达采用方位扇扫的方式,可以实现-178
°
~178
°
之间的区域观测,由于天线方位波束宽度大约为5
°
,因此按照该方式可以满足方位360
°
全覆盖的要求,也省去了汇流环部分,在降低系统复杂性和设计成本的同时提高了可靠性;上述方位观测范围可以根据需求进行设定,也可以实现某一角度的凝视功能,通过空间能量的重新分配,提高特定目标的检测能力。
[0055]
针对雷达检测威力的计算:
[0056]
针对雷达检测距离的计算公式为:
[0057][0058]
式中各参数含义如表1所示:
[0059][0060]
表1威力推导仿真参数表
[0061]
针对工作模式的选择:
[0062]
本发明提供的雷达设置有两种工作模式:分别为正常搜索和凝视模式,其主要工作参数如表2所示。
[0063]
工作模式转速(rpm)prf周期(us)脉宽(us)长码/短码量程(km)正常搜索113025/0.515凝视013025/0.515
[0064]
表2雷达工作模式参数对比
[0065]
其中,搜索模式是雷达的主要工作模式,用来完成对目标的搜索探测,在该模式下,天线法线方向与水平方向夹角设置为1.8
°
,天线转速设定为1转/分钟。
[0066]
控制平面阵列天线的发射波束为单笔形波束,俯仰波束宽度为8
°
、方位波束宽度
为5.2
°
;接收采用和差单脉冲形式。在转速为1转/分钟时,主要设计参数如下:
[0067]
距离量程:15km;
[0068]
天线转速:1rpm(6
°
/s);
[0069]
方位覆盖范围:-178
°
~+178
°
;
[0070]
俯仰覆盖范围:-5
°
~+20
°
;
[0071]
仰角波束:笔形波束,宽度8
°
;
[0072]
最大作用距离:
[0073]
行走人员(v>0.5m/s):9km(rcs=0.5m2,pd=80%)
[0074]
移动车辆(v》2m/s):15km(rcs=30m2,pd=80%)
[0075]
无人机(v》1m/s):4km(rcs=0.05m2,pd=80%)
[0076]
最小作用距离:≤75m:
[0077]
脉冲重复周期:130μs;
[0078]
脉冲宽度:25μs(长脉冲)、0.5μs(短脉冲);
[0079]
mtd点数:4096。
[0080]
在搜索模式下,雷达发射脉冲宽度为:长脉冲25μs、短脉冲0.5μs,其中长脉冲信号为线性调频信号,用于中远区目标探测,短脉冲信号为简单脉冲信号,用于近区目标探测。
[0081]
如图4所示,根据雷达威力覆盖图可知,长脉冲威力覆盖范围3.7~10km;短脉冲威力覆盖范围75m~4.2km,长、短脉冲可以很好的实现距离衔接。
[0082]
凝视模式下的雷达方位不扫描,仅停留在固定的方位角度上,通过增加驻留时间的方式,可以完成指定方位、全距离全速度通道的3d信息显示功能,利用人工判读完成目标检测与识别,实现对重点关心区域的监视。
[0083]
进一步的,本发明在对空中目标进行检测的同时,需要针对抗无源干扰特性进行分析,雷达在检测目标时,需要同时考虑:
[0084]
1、考虑地物杂波:
[0085]
地杂波是一种面杂波,它的强度与雷达天线波束照射的杂波区面积以及杂波的后向散射系数大小有关,地杂波的雷达反射截面积可表示为:
[0086]
σc=rθaz(cτ/2)(σ0/lp);
[0087]
式中:r为距离,0az为方位波束3db宽度,取5.2
°
,τ为压缩后的脉冲宽度(考虑到加窗展宽估计值为2.6us),c为光速,σ0为地面反射系数,x波段取-20db,lp=1.33db为波束形状损失。
[0088]
因此相对于不同距离其地杂波强度如下表所示:
[0089]
距离(km)13510地杂波截面积(dbm2)24.529.131.434.5
[0090]
表3地杂波强度与距离对应表
[0091]
2、考虑气象杂波:
[0092]
气象杂波是一种体杂波,其雷达反射截面积可表示为:
[0093]
σc=rθazrθel(cτ/2)η;
[0094]
式中:0az为方位波束3db宽度取5.2
°
,θel为仰角波束3db宽度取8
°
,η为反射效率,r为距离,τ为脉冲宽度,c为光速。
[0095]
同时考虑反射效率,计算公式为:
[0096]
η=6
×
10-14
×r1.6
×
λ-4
;
[0097]
其中r为雨量(毫米/小时),λ为波长(米)。
[0098]
该雷达波长取0.028m,η与雨量r的关系如下表所示:
[0099]
雨量r(mm/h)41030100反射效率η(m2/m3)8.97
×
10-73.89
×
10-62.25
×
10-51.55
×
10-4
[0100]
表4气象杂波反射效率与雨量对应表
[0101]
实施例在雨量为10mm/h时计算杂波强度,其值如下表所示:
[0102]
距离(km)13510雨杂波截面积(dbm2)12.422.627.133.3
[0103]
表5气象杂波强度与距离对应表
[0104]
按10km计算相应的地杂波以及气象杂波强度,计算结构如图5所示:
[0105]
3、考虑改善因子:
[0106]
需要的改善因子如下式所示,计算公式为:
[0107][0108]
式中:和σ
t
分别为杂波雷达反射面强度和目标雷达反射面强度,do为检测因子,考察rcs为0.5m2的目标,对于10km的地物杂波,i≥50.1db;对10km气象杂波(降雨量为10mm/h),i≥48.9db;
[0109]
实施例对改善因子的设计指标为52db,能满足使用要求。
[0110]
则系统总的改善因子限制i的计算公式为:
[0111][0112]
式中各改善因子限制为:
[0113]
杂波内部起伏:i1=64db;
[0114]
天线扫描调制:i2=66db;
[0115]
本振频率稳定度:i3=70db;
[0116]
发射信号幅度稳定度:i4=70db;
[0117]
发射信号脉宽抖动:i5=70db;
[0118]
接收机线性动态范围:i6=60db;
[0119]
a/d量化:i6=64db。
[0120]
进一步的,本发明还可采用雷达组网进行监视,本发明使用的雷达属于地面监视雷达,由于作用距离仅10km,因此为了满足较大范围的区域覆盖监视,可以考虑根据用户的需求,将多部雷达进行组网配置,每部雷达站终端设备与上级情报监视网互联,由上级情报网实现各雷达的状态控制(工作频率等),各雷达独立工作,并将各自检测区域内的信息由终端再上报至上级情报监视网,监视雷达组网功能的示意图如图6所示。
[0121]
最后还需考虑雷达展开撤收的时间分配:移动式监视雷达由天线部分、支撑部分以及相关的通信及供电电缆组成,架设和时首先选择平整坚硬的场地,然后架设雷达支撑部分,固定牢靠后将天线部分可靠安装于支撑部分之上,最后连接通信及供电电缆即可。由于系统组成简单,零部件规整,因此架设时间能满足3min的指标要求;撤收是架设的逆过程,首先雷达关机,然后断开供电及通信电缆,最后拆除天线和支撑部件。此时雷达完成撤收工作,可以满足转场需要。
[0122]
最后应说明的是:以上各实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述各实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分或者全部技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1