光学位移计和测量对象的轮廓的测量方法与流程
光学位移计和测量对象的轮廓的测量方法
1.(本技术是申请日为2019年8月12日、申请号为201910740724.2、发明名称为“光学位移计”的申请的分案申请。)
技术领域
2.本发明涉及通过三角测量法来检测测量对象的位移的光学位移计。
背景技术:
3.在使用光切法的光学位移计中,从光投射单元利用具有线状截面的带状光照射测量对象(以下称为工件),并且反射光被二维的受光元件接收。基于受光元件所获得的受光量分布的峰的位置来测量工件的轮廓。这里,照射到工件上的光在工件的表面上可能发生多重反射。在这种情况下,由于因多重反射后的光入射到受光元件上而导致在受光量分布中出现多个峰,因此不能测量工件的准确轮廓。在来自除光投射单元以外的部分的光(干扰光)入射到受光元件上的情况下、或者在从工件的除测量目标部分以外的部分反射的光入射到受光元件上的情况下,发生相同的问题。
4.在日本特开2012-127887所述的光学位移计中,利用在彼此垂直的方向上偏振的第一光和第二光顺次照射工件。从工件反射的第一光和第二光被受光元件接收,并且生成指示第一光和第二光的受光量分布的第一波形数据和第二波形数据。
5.基于第一波形数据和第二波形数据之间的彼此对应的峰的比来从第一波形数据和第二波形数据中选择一个峰。基于所选择的峰的位置来测量工件的轮廓。
6.根据日本特开2012-127887所述的光学位移计,可以从受光量分布中的多个峰中选择由于在工件的表面上仅反射一次的光而产生的峰。然而,由于在光学位移计中需要设置用于发射在彼此垂直的方向上偏振的光的两个光投射元件,因此导致光学位移计的制造成本增加。另外,由于需要获取第一波形数据和第二波形数据并且需要对这些波形数据进行计算,因此不能高效地测量工件的轮廓。
技术实现要素:
7.本发明的目的是提供能够在防止制造成本增加的同时高效地测量测量对象的轮廓的光学位移计。
8.(1)根据本发明的光学位移计是一种光学位移计,其使用光切法,所述光学位移计用于对测量对象的轮廓进行测量,所述光学位移计包括:光投射单元,用于利用沿第一方向扩散的狭缝光或者沿所述第一方向扫描的点光来照射所述测量对象;受光单元,其包括沿所述第一方向和与所述第一方向相交的第二方向配置的多个像素,并且用于接收来自所述测量对象沿所述第一方向的各位置的反射光、并输出受光量分布;峰检测单元,用于基于从沿所述第一方向配置的多个像素列分别输出的多个受光量分布,针对各像素列来检测受光量在所述第二方向上的一个或多个峰候选位置;以及轮廓生成单元,用于从所述峰检测单元针对各像素列所检测到的峰候选位置中,基于与同该像素列相邻的其它像素列的峰位置
的相对位置关系来选择对所述轮廓所要采用的峰位置,并且基于所选择的峰位置来生成用于指示所述轮廓的轮廓数据。
9.在该光学位移计中,利用光投射单元扫描沿第一方向扩散的狭缝光或沿第一方向的点光,并将该狭缝光或点光照射到测量对象上。来自测量对象的反射光由受光单元中的沿第一方向配置的多个像素列接收,并且输出受光量分布。在各像素列中,多个像素沿第二方向配置。峰检测单元基于从多个像素列输出的多个受光量分布,针对各像素列来检测一个或多个受光量在第二方向上的峰候选位置。基于与相邻的其它像素列的峰位置的相对位置关系来从所检测到的峰候选位置中选择对轮廓所要采用的峰位置,并且轮廓生成单元基于所选择的峰位置来生成指示轮廓的轮廓数据。
10.利用该结构,即使在与任何像素列相对应的受光量分布中检测到多个峰候选位置的情况下,也针对各像素列基于与其它像素列的峰位置的相对位置关系来选择对轮廓所要采用的峰位置。在这种情况下,无需在光学位移计中设置具有不同偏振方向的多个光投射元件。此外,无需针对各像素列获取多个受光量分布,因此无需对多个受光量分布进行计算。结果,可以在防止制造成本的增加的同时高效地测量测量对象的轮廓。
11.(2)所述光学位移计还可以包括:切换单元,用于使所述轮廓生成单元的操作模式在第一操作模式和第二操作模式之间切换。在所述第一操作模式中,在所述峰检测单元检测到与任意像素列相对应的受光量分布中的多个峰候选位置的情况下,所述轮廓生成单元可以基于所述第一方向上至少与同该像素列相邻的像素列相对应的受光量分布中的峰候选位置和所检测到的多个峰候选位置之间的连续性,从多个峰候选位置中选择所述轮廓中所要采用的峰位置。在所述第二操作模式中,在所述峰检测单元在与像素列相对应的受光量分布中检测到多个峰候选位置的情况下,所述轮廓生成单元可以基于预设条件从多个峰候选位置中选择对所述轮廓所要采用的峰位置。
12.在测量对象的一些形状中,基于预设条件所选择的峰位置可以与测量对象的表面的位置一致。在这种情况下,可以通过选择第二操作模式来更高效地测量测量对象的轮廓。
13.(3)所述预设条件可以包括如下的条件:从各受光量分布中的多个峰候选位置中选择具有最大受光量的峰候选位置作为对所述轮廓所要采用的峰位置。利用该结构,在具有最大受光量的峰候选位置与测量对象的表面的位置一致的情况下,可以通过选择第二操作模式来更高效地测量测量对象的轮廓。
14.(4)所述预设条件还可以包括如下的条件:从各受光量分布中的多个峰候选位置中选择离所述第二方向上的一端或另一端最近的峰候选位置作为对所述轮廓所要采用的峰位置。利用该结构,在离第二方向上的一端或另一端最近的峰候选位置与测量对象的表面的位置一致的情况下,可以通过选择第二操作模式来更高效地测量测量对象的轮廓。
15.(5)所述光学位移计还可以包括:参数获取单元,用于获取用于指示所述峰检测单元所检测到的峰候选位置中的峰的模式的参数。所述轮廓生成单元可以基于所述参数获取单元所获取到的参数,从各受光量分布中的多个峰候选位置中选择对所述轮廓所要采用的峰位置。
16.在这种情况下,基于使用第一方向上的多个像素列的峰候选位置之间的相对位置关系以及峰的模式的综合判断来选择对轮廓所要采用的峰位置。结果,可以更准确地测量测量对象的轮廓。
17.(6)所述参数获取单元所获取到的参数可以包括峰的受光量或峰的宽度。在这种情况下,可以容易地获取指示峰的模式的参数。
18.(7)所述光学位移计还可以包括:簇生成单元,用于从所述峰检测单元所检测到的多个受光量分布中的多个峰候选位置,生成各自包括一个以上的峰候选位置的多个簇。各簇可以包括以在所述第一方向上彼此相邻的峰候选位置之间的距离等于或小于预定值的方式所选择的一个以上的峰候选位置,以及所述轮廓生成单元可以基于所述簇生成单元生成的各簇中所包括的峰候选位置的数量来判断所述相对位置关系。在这种情况下,可以基于各簇中所包括的峰候选位置的数量来容易地判断相对位置关系。
19.(8)所述光学位移计还可以包括距离计算单元,用于计算与各像素列相对应的受光量分布中的各峰候选位置和在所述第一方向上与同各像素列相邻的像素列相对应的受光量分布中的峰候选位置之间的距离。所述轮廓生成单元可以基于所述距离计算单元所计算出的距离来判断所述相对位置关系。在这种情况下,可以基于相邻的峰候选位置之间的距离来容易地判断相对位置关系。
20.(9)所述光学位移计还可以包括:图案生成单元,用于基于所述峰检测单元所检测到的多个峰候选位置来生成几何图案;以及相关计算单元,用于针对各像素列,计算所述图案生成单元所生成的几何图案和所述峰检测单元所检测到的多个峰候选位置之间的相关系数。所述轮廓生成单元可以基于所述相关计算单元所计算出的相关系数来判断所述相对位置关系。在这种情况下,可以基于几何图案和多个峰候选位置之间的相关系数来容易地判断相对位置关系。
21.(10)所述光学位移计还可以包括:滤波处理单元,用于对所述轮廓数据进行滤波处理,使得在所述轮廓生成单元所生成的所述轮廓数据的各部分中,平滑效果随着值的变化的变小而变大。在这种情况下,可以在维持轮廓中的台阶部分和边缘部分的形状的同时,使与测量对象的平坦部分相对应的轮廓的部分平滑化。
22.根据本发明,可以在防止制造成本的增加的同时高效地测量测量对象的轮廓。
附图说明
23.图1是示出根据第一实施例的光学位移计的结构的框图;
24.图2是摄像头和工件的外观立体图;
25.图3是示出工件的表面上的光照射位置和受光单元上的光入射位置之间的关系的图;
26.图4是示出工件的表面上的光照射位置和受光单元上的光入射位置之间的关系的图;
27.图5是示出受光单元的受光面上的受光量分布的图;
28.图6是示出图5的一个像素列中的受光量分布的图;
29.图7是示出图5的受光量分布中的所有峰位置的图;
30.图8是示出基于图7的峰位置所获取到的轮廓数据的图;
31.图9a和9b是用于说明工件的表面上的反射的图;
32.图10是示出受光单元中的受光量分布的另一示例的图;
33.图11是示出图10的一个像素列中的受光量分布的图;
34.图12是示出轮廓获取单元的结构的框图;
35.图13是用于说明第一操作模式中的轮廓获取单元的操作的图;
36.图14是用于说明第一操作模式中的轮廓获取单元的操作的图;
37.图15是用于说明第一操作模式中的轮廓获取单元的操作的图;
38.图16是示出根据变形例的轮廓获取单元的结构的框图;
39.图17a~17c是用于说明图12的滤波处理单元的操作的图;
40.图18是示出根据第二实施例的轮廓获取单元的结构的框图;
41.图19是用于说明根据第二实施例的第一操作模式中的轮廓获取单元的操作的图;
42.图20是示出根据第三实施例的轮廓获取单元的结构的框图;以及
43.图21a和21b是用于说明根据第三实施例的第一操作模式中的轮廓获取单元的操作的图。
具体实施方式
44.[1]第一实施例
[0045]
(1)光学位移计的结构
[0046]
以下将参考附图来说明使用光切法的光学位移计作为根据本发明实施例的光学位移计。图1是示出根据第一实施例的光学位移计的结构的框图。如图1所示,光学位移计500包括摄像头100、处理装置200、输入单元300和显示单元400。光学位移计500可以包括多个摄像头100。摄像头100被配置成可从处理装置200拆卸。摄像头100和处理装置200可以是一体设置的。
[0047]
摄像头100包括光投射单元110和摄像单元120。光投射单元110被配置为能够利用沿一个方向(后面要说明的x1方向)扩散的带状光照射测量对象(以下称为工件w)。光投射单元110可被配置为代替使用沿一个方向扩散的带状光,能够利用沿一个方向扫描的光来照射工件w。
[0048]
摄像单元120包括受光单元121和受光透镜122。来自工件w的反射光穿过受光透镜122,并且入射到受光单元121上。受光单元121包括例如互补金属氧化物半导体(cmos)传感器,并且具有二维配置的多个像素。将受光单元121的受光量分布输出作为数字数据。
[0049]
处理装置200包括存储单元210和控制单元220。处理装置200还包括光投射控制单元221、受光控制单元222、输入设置单元223、轮廓获取单元224、切换单元225、测量处理单元226和显示处理单元227作为功能单元。
[0050]
存储单元210包括随机存取存储器(ram)、只读存储器(rom)、硬盘或半导体存储器等,并且存储测量程序。控制单元220是例如中央处理单元(cpu)。控制单元220执行存储单元210中所存储的测量程序,由此实现处理装置200的功能单元。处理装置200的功能单元的一部分或全部可以由诸如电子电路等的硬件实现。
[0051]
光投射控制单元221控制光投射单元110的光照射定时和光强度等。受光控制单元222控制受光单元121的受光定时等。输入设置单元223基于输入单元300所给出的命令信号来将该命令信号提供至轮廓获取单元224、切换单元225和测量处理单元226。
[0052]
轮廓获取单元224基于从受光单元121输出的受光量分布和从输入设置单元223给出的命令信号来获取指示工件w的轮廓的轮廓数据。切换单元225基于输入设置单元223所
给出的命令信号来使轮廓获取单元224的操作模式在第一操作模式和第二操作模式之间切换。后面将说明轮廓获取单元224和操作模式的详情。
[0053]
测量处理单元226对轮廓获取单元224所获取到的轮廓数据进行测量处理。这里,测量处理是用于基于轮廓数据来计算工件w的表面上的任何部分的尺寸(位移)的处理。显示处理单元227生成指示基于轮廓数据的工件w的形状和通过测量处理所计算出的尺寸(位移)的图像数据,并且将所生成的图像数据提供至显示单元400。
[0054]
输入单元300包括键盘和指点装置,并且被配置成可由用户操作。使用鼠标或操纵杆等作为指点装置。可以使用专用控制台作为输入单元300。用户操作输入单元300,因而从输入单元300向处理装置200的输入设置单元223给出命令信号。
[0055]
显示单元400是例如液晶显示面板或有机电致发光(el)面板。显示单元400基于处理装置200的显示处理单元227所提供的图像数据来显示工件w的轮廓和测量处理单元226的测量结果。
[0056]
(2)操作的概要
[0057]
图2是摄像头100和工件w的外观立体图。图3和4是示出工件w的表面上的光照射位置和受光单元121上的光入射位置之间的关系的图。在图2~4中,在水平面内彼此垂直的两个方向被定义为x1方向和y1方向,并且分别由箭头x1和y1表示。垂直方向被定义为z1方向并且由箭头z1表示。在图3和4中,在受光单元121的受光面上彼此垂直的两个方向被定义为x2方向和z2方向,并且分别由箭头x2和z2表示。这里,受光面是由受光单元121的多个像素形成的面。
[0058]
在图2的示例中,在工件w的表面中形成具有沿y1方向延伸的梯形截面的槽。摄像头100利用沿着x1方向的带状光照射工件w的表面。在下文,将带状光照射到的工件w的表面上的线状区域称为照射区域t1。如图3所示,从照射区域t1反射的光穿过受光透镜122,并且入射到受光单元121上。在这种情况下,在照射区域t1中的光的反射位置在z1方向上不同时,反射光向受光单元121的入射位置在z2方向上不同。
[0059]
如图4所示,在照射区域t1中的光的反射位置在x1方向上不同时,反射光向受光单元121的入射位置在x2方向上不同。因此,z2方向上的光向受光单元121的入射位置表示z1方向上的照射区域t1的位置(高度),并且x2方向上的光向受光单元121的入射位置表示x1方向上的照射区域t1的位置。
[0060]
图5是示出受光单元121的受光面上的受光量分布的图。基于图5中的受光单元121的各像素p的受光量来生成受光量分布。受光单元121的多个像素p是沿着x2方向和z2方向二维地配置的。将沿着z2方向的多个像素p的各个列称为像素列ss。因此,在受光单元121的受光面上多个像素列ss沿x2方向配置,并且各像素列ss包括沿着z2方向的多个像素p。
[0061]
本发明中的各像素p不限于诸如cmos传感器等的摄像装置的一个像素(像素的最小单位),并且可以包括多个像素。例如,各像素p可以包括按2
×
2配置的四个像素,或者各像素p可以包括按3
×
3配置的九个像素。因此,在以多个像素作为一个单位进行组合处理(binning processing)的情况下,各像素p可以包括该一个单位中所包括的多个像素。
[0062]
从图2的照射区域t1反射的光入射到图5所示的受光区域r1上。结果,受光区域r1的受光量增加。针对各像素列ss将图5的受光量分布输出作为数字数据。
[0063]
图6是示出图5的一个像素列ss中的受光量分布的图。在图6中,横轴表示z2方向上
的位置,并且纵轴表示受光量。如图6所示,在一个像素列ss中的受光量分布中出现与图5的受光区域r1相对应的峰p(局部最大值)。峰p在z2方向上的位置(以下称为峰位置pp)指示照射区域t1中的工件w的表面(反射面)的高度。
[0064]
图1的轮廓获取单元224检测与多个像素列ss相对应的多个受光量分布各自中的一个以上的峰位置pp(在图6的示例中为一个)。轮廓获取单元224基于多个峰位置pp来获取指示工件w的轮廓(照射区域t1的形状)的轮廓数据。
[0065]
图7是示出图5的受光量分布中的所有峰位置pp的图。图8是示出基于图7的峰位置pp所获取到的轮廓数据的图。如图7和8所示,将所检测到的所有峰位置pp示出为连续线,因而获得指示工件w的轮廓的轮廓数据。
[0066]
如上所述,从照射区域t1反射的光入射到受光单元121上,因而在受光量分布中出现表示照射区域t1的高度的峰。然而,从除照射区域t1以外的部分反射的光可能入射到受光单元121上。在这种情况下,在受光量分布中出现与指示照射区域t1的高度的峰(以下称为真峰)不同的峰(以下称为伪峰)。图9a和9b是用于说明工件w的表面上的反射的图。图10是示出受光单元121中的受光量分布的另一示例的图。图11是示出图10的一个像素列ss中的受光量分布的图。
[0067]
如图9a所示,照射到工件w上的光从照射区域t1发生镜面反射和漫反射。这里,镜面反射是指入射角和反射角相等的反射,并且漫反射是指入射角和反射角不同的反射。通常,从照射区域t1发生镜面反射的光未入射到受光单元121上,而从照射区域t1发生漫反射的一部分光l1入射到受光单元121上。另一方面,如图9b所示,从照射区域t1发生漫反射的其它一些光l2可能从工件w的表面上的除照射区域t1以外的其它区域(以下称为伪照射区域t2)发生镜面反射,并且可能入射到受光单元121上。
[0068]
在光发生镜面反射的情况下,光的强度在该反射前后不会大幅改变。因此,在从照射区域t1入射到受光单元121的光l1的强度和从伪照射区域t2入射到受光单元121的光l2的强度之间不会产生大的差异。本实施例是示例,并且这样的多重反射(多次发生的反射)可以在各种状况下发生。例如,在工件w和摄像头100被配置成使得镜面反射光由受光单元121作为来自工件w的反射光而接收的情况下,除镜面反射光以外的漫反射光可能进一步从其它区域反射,并且可能由受光单元121接收。
[0069]
在这种情况下,如图10所示,在受光单元121的受光面上,除受光区域r1以外的其它区域(以下称为伪受光区域r2)的受光量增加。因此,如图11所示,在受光量分布中,除了作为与受光区域r1相对应的峰p的真峰p1之外,还出现作为与伪受光区域r2相对应的峰p的伪峰p2。也就是说,轮廓获取单元224检测真峰p1的位置和伪峰p2的位置作为峰p的候选位置(以下称为峰候选位置)。在代替真峰p1的位置而是使用伪峰p2的位置的情况下,不能获得准确的轮廓数据。
[0070]
另外,来自除光投射单元110以外的部分的光(干扰光)可能入射到受光单元121。可选地,照射到工件w的除照射区域t1以外的部分上的光可能被反射,并且可能入射到受光单元121上。在这些情况下,在受光量分布中除出现真峰p1之外还出现伪峰p2,因而发生相同的问题。
[0071]
因此,轮廓获取单元224选择性地以第一操作模式或第二操作模式操作。在第一操作模式中,基于与同像素列ss相邻的像素列ss相对应的受光量分布中的峰候选位置和所检
测到的多个峰候选位置之间的相对位置关系(例如,连续性),不是选择伪峰p2的位置而是选择真峰p1的位置作为峰位置pp。在第二操作模式中,基于预设条件从多个峰候选位置中选择一个峰候选位置作为峰位置pp。
[0072]
以下将详细说明轮廓获取单元224的操作。在以下的说明中,将与像素列ss相对应的受光量分布中的峰候选位置简称为像素列ss的峰候选位置。
[0073]
(3)轮廓获取单元
[0074]
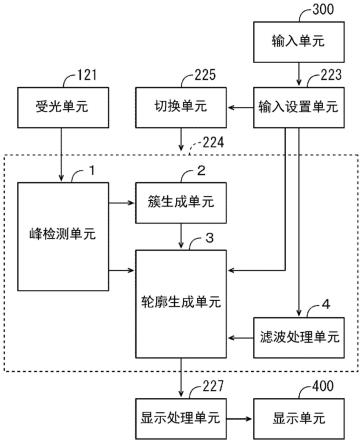
图12是示出轮廓获取单元224的结构的框图。如图12所示,轮廓获取单元224包括峰检测单元1、簇生成单元2、轮廓生成单元3和滤波处理单元4作为功能单元。图1的控制单元220执行存储单元210中所存储的测量程序,由此实现轮廓获取单元224的功能单元。轮廓获取单元224的功能单元的一部分或全部可以由诸如电子电路等的硬件实现。
[0075]
在第一操作模式和第二操作模式中,峰检测单元1基于从受光单元121输出的受光量分布来检测各像素列ss的峰(包括峰候选位置。后面同样适用)。在第一操作模式中,簇生成单元2从峰检测单元1所检测到的多个峰候选位置生成多个簇。这里,各簇包括以在x2方向上彼此相邻的峰候选位置之间的距离等于或小于预定值的方式选择的一个以上的峰候选位置。
[0076]
在第一操作模式中,轮廓生成单元3基于簇生成单元2所生成的各簇中包含的峰候选位置的数量来从各受光量分布中的多个峰候选位置中选择与工件w的表面的位置相对应的峰位置pp。在本实施例中,选择最大的簇中所包括的峰候选位置作为峰位置pp。簇的大小意味着簇中所包括的峰候选位置的数量。
[0077]
在第二操作模式中,轮廓生成单元3基于预设条件从各受光量分布中的多个峰候选位置中选择一个峰位置pp。预设条件包括“标准(standard)(最大峰)”、“近(near)”和“远(far)”。在“标准(最大峰)”的情况下,从各受光量分布中的多个峰候选位置中选择具有最大受光量的峰候选位置作为峰位置pp。在图11的示例中,从两个峰p中选择具有最大受光量的真峰p1的位置作为峰位置pp。
[0078]
在“近”的情况下,从各受光量分布中的多个峰候选位置中选择离z2方向上的一端(例如,左端)最近的峰候选位置作为峰位置pp。在图11的示例中,从两个峰p中选择出现在最左侧的伪峰p2的位置作为峰位置pp。在“远”的情况下,从各受光量分布中的多个峰候选位置中选择离z2方向上的另一端(例如,右端)最近的峰候选位置作为峰位置pp。在图11的示例中,从两个峰p中选择出现在最右侧的真峰p1的位置作为峰位置pp。
[0079]
用户操作输入单元300,因而可以利用输入设置单元223设置“标准(最大峰)”、“近”和“远”中的任一个。在工件w的一些形状中,基于任何条件所选择的峰位置pp可以与工件w的表面的位置一致。因此,在用户识别出与工件w的形状相对应的适当条件的情况下,可以通过在第二操作模式下设置该条件来更高效地选择与工件w的表面的位置相对应的适当峰位置pp。
[0080]
此外,轮廓生成单元3基于所选择的峰位置pp来生成指示工件w的轮廓的轮廓数据。滤波处理单元4对轮廓数据进行滤波处理,使得在轮廓生成单元3所生成的轮廓数据的各部分处,随着值的变化变小,平滑效果变大。后面将说明滤波处理单元4的详情。将基于轮廓生成单元3所生成的轮廓数据的轮廓通过显示处理单元227显示在显示单元400上。
[0081]
图13、14和15是用于说明第一操作模式中的轮廓获取单元224的操作的图。如上所
述,图12的峰检测单元1检测各像素列ss的峰候选位置。在图13的示例中,利用点图案表示与所检测到的峰候选位置相对应的受光单元121的像素p。如图13所示,在一些像素列ss中检测多个峰候选位置。
[0082]
图12的簇生成单元2从峰检测单元1所检测到的多个峰候选位置生成多个簇。在同一簇中包括在x2方向上彼此相邻的多个峰候选位置。同一簇中所包括的两个峰候选位置不必在x2方向上彼此相邻。预定峰候选位置和从该预定峰候选位置起的预定距离内的峰候选位置可以包括在同一簇中。
[0083]
在图14的示例中,从多个峰候选位置生成14个簇c1~c14,并且利用不同的点图案或阴影图案来指示这些簇c1~c14。簇c1是最大的簇,簇c14是第二大的簇,并且簇c2、c3、c5~c7和c9是最小的簇。在图14中,将沿x2方向配置的多个像素列ss从左侧起顺次称为像素列ss1、ss2、ss3、...。
[0084]
在像素列ss1中,检测到三个峰候选位置,并且这三个峰候选位置分别包括在簇c1、c2和c3中。在像素列ss2中,检测到三个峰候选位置,并且这三个峰候选位置分别包括在簇c1、c4和c5中。在像素列ss3中,检测到四个峰候选位置,并且这四个峰候选位置分别包括在簇c1、c4、c6和c7中。在这些情况下,图12的轮廓生成单元3选择最大的簇c1中所包括的峰候选位置作为峰位置pp。
[0085]
在像素列ss4~ss8中,仅检测到簇c1中所包括的一个峰候选位置。在这些情况下,轮廓生成单元3选择该峰候选位置作为峰位置pp。
[0086]
同样,如图15所示,在受光单元121的沿x2方向的区域a1的像素列ss中,选择簇c1中所包括的峰候选位置作为峰位置pp。在受光单元121的沿x2方向的区域a2的像素列ss中,选择簇c14中所包括的峰候选位置作为峰位置pp。在图15的示例中,利用点图案来指示与所选择的峰位置pp相对应的受光单元121的像素p。图12的轮廓生成单元3基于所选择的峰位置pp来生成轮廓数据。
[0087]
(4)变形例
[0088]
尽管在本实施例中已经说明了选择最大的簇中所包括的峰候选位置作为峰位置pp,但本发明不限于此。可以基于使用簇中所包括的峰候选位置的数量和指示峰候选的模式的其它参数的综合判断来选择峰位置pp。
[0089]
图16是示出根据变形例的轮廓获取单元224的结构的框图。将说明图16的轮廓获取单元224和图12的轮廓获取单元224之间的不同之处。如图16所示,根据变形例的轮廓获取单元224还包括参数获取单元5。在第一操作模式中,参数获取单元5获取分别指示峰检测单元1所检测到的多个候选峰p的模式的多个参数。
[0090]
具体地,真峰p1的受光量往往大于伪峰p2的受光量。可选地,真峰p1的宽度往往窄于伪峰p2的宽度。因此,参数获取单元5获取例如峰p的候选的受光量或峰p的候选的宽度作为上述参数。
[0091]
轮廓生成单元3综合判断簇生成单元2所生成的各簇中所包括的峰候选位置的数量、以及参数获取单元5所获取到的峰的候选的受光量或该峰的候选的宽度。作为该判断的结果,轮廓生成单元3选择任一个簇,并且选择所选择的簇中包括的峰候选位置作为峰位置pp。
[0092]
(5)滤波处理单元
[0093]
图17a~17c是用于说明图12的滤波处理单元4的操作的图。在图17a~17c中,工件w的轮廓显示在显示单元400上。在显示单元400的画面上定义了分别与图1的受光单元121的x2方向和z2方向相对应的x3方向和z3方向。
[0094]
即使在工件w的部分平坦的情况下,在工件w的表面的一些状态或颜色不均匀等方面,如图17a所示,基于轮廓数据的工件w的轮廓的部分也可能不平坦并且可能呈锯齿状。在对轮廓数据进行平滑滤波处理以使工件w的轮廓的部分平滑化的情况下,如图17b所示,轮廓的台阶部分或边缘部分消失,并且不能获得准确的轮廓。
[0095]
因此,在本实施例中,滤波处理单元4通过计算以下的表达式(1)来计算输出值fi。这里,在将沿x3方向配置的多个像素列ss从左侧起顺次编号为第i个(i是1以上的整数)的情况下,表达式(1)中的zi是轮廓数据中的与第i个像素列ss相对应的部分在z3方向上的位置(高度)。α是z3方向上的加权参数。k是1以上的整数,并且表示针对编号i进行计算的范围(核)。
[0096][0097]
对所有的编号i计算表达式(1)的输出值fi,因而对轮廓数据进行滤波处理,使得轮廓中的高度变化较小的部分处的平滑效果大于高度变化较大的部分处的平滑效果。结果,如图17c所示,在维持台阶部分和边缘部分的形状的同时使轮廓平滑化。
[0098]
滤波处理单元4可以通过代替表达式(1)而计算以下的表达式(2)来计算输出值fi。这里,表达式(2)中的xi是轮廓数据中的与第i个像素列ss相对应的部分在x3方向上的位置。β是x3方向上的加权参数。其它参数与表达式(1)中的参数相同。
[0099][0100]
对所有的编号i计算表达式(2)的输出值fi,因而对轮廓数据进行滤波处理,使得轮廓中的高度变化较小的部分处的平滑效果大于高度变化较大的部分处的平滑效果。对轮廓数据进行滤波处理,使得轮廓中的在x3方向上彼此相邻的部分之间的平滑效果大于在x3方向上彼此间隔开的部分之间的平滑效果。
[0101]
此外,用户可以通过操作输入单元300来指定在z3方向上要进行滤波处理的轮廓数据的范围。还可以指定进行滤波处理的多个范围。图17a示出利用点图案指定要进行滤波处理的两个范围f1和f2的示例。
[0102]
在表达式(1)或表达式(2)中,核k可以在图1的输入设置单元223中被设置为高斯核,或者可以由操作图1的输入单元300的用户在输入设置单元223中设置。可选地,在图1的测量处理单元226被设置成测量轮廓的预定台阶部分的情况下,可以根据该台阶部分的大小在输入设置单元223中自动设置核k。
[0103]
(6)效果
[0104]
在根据本实施例的光学位移计500中,光投射单元110利用光照射工件w。来自工件w的反射光由受光单元121中的沿x2方向配置的多个像素列ss接收,并且输出受光量分布。峰检测单元1在多个受光量分布各自中检测相应像素列ss的多个像素p配置的z2方向上的受光量的一个或多个峰候选位置。从针对各像素列ss所检测到的峰位候选位置中基于与同该像素列ss相邻的其它像素列ss的峰位置pp的相对位置关系来选择对轮廓所要采用的峰位置pp,并且轮廓生成单元3基于所选择的峰位置pp来生成指示工件w的轮廓的轮廓数据。
[0105]
利用该结构,即使在针对任何像素列ss检测到多个峰候选位置的情况下,也可以针对该像素列ss基于与其它像素列ss的峰位置pp的相对位置关系来选择对轮廓所要采用的峰位置pp。在这种情况下,无需在光学位移计500中设置具有不同偏振方向的多个光投射元件。此外,无需针对各像素列ss获取多个受光量分布。因此,无需对多个受光量分布进行计算。结果,可以在防止制造成本增加的同时高效地测量工件w的轮廓。
[0106]
在判断相对位置关系时,簇生成单元2从所检测到的多个受光量分布中的多个峰候选位置生成各自包括一个以上的峰候选位置的多个簇。各簇包括以在x2方向上彼此相邻的峰候选位置之间的距离等于或小于预定值的方式所选择的一个以上的峰候选位置。轮廓生成单元3基于所生成的各簇中所包括的峰候选位置的数量来判断相对位置关系。在这种情况下,可以容易地判断相对位置关系。
[0107]
[2]第二实施例
[0108]
将说明根据第二实施例的光学位移计500和根据第一实施例的光学位移计500之间的不同之处。图18是示出根据第二实施例的轮廓获取单元224的结构的框图。如图18所示,在本实施例中,代替图12的簇生成单元2,轮廓获取单元224包括距离计算单元6。
[0109]
在第一操作模式中,距离计算单元6计算各像素列ss的各峰候选位置和与该像素列ss相邻的像素列ss的峰位置pp之间的距离。轮廓生成单元3基于距离计算单元6所计算出的距离来从各像素列ss的多个峰候选位置中选择峰位置pp。在本实施例中,针对各像素列ss,选择与相邻的像素列ss的峰候选位置的距离最小的峰候选位置作为峰位置pp。
[0110]
图19是用于说明根据第二实施例的第一操作模式中的轮廓获取单元224的操作的图。图18的峰检测单元1检测各像素列ss的峰候选位置。在图19的示例中,利用点图案来指示与所检测到的峰候选位置相对应的受光单元121的像素p。
[0111]
具体地,在像素列ss1中,检测到一个峰候选位置,并且与该峰候选位置相对应的像素p是像素p1。在像素列ss2中,检测到两个峰候选位置,并且与这些峰候选位置相对应的像素p分别是像素p2和p3。在像素列ss3中,检测到两个峰候选位置,并且与这些峰候选位置相对应的像素p分别是像素p4和p5。在像素列ss4中,检测到两个峰候选位置,并且与这些峰候选位置相对应的像素p分别是像素p6和p7。
[0112]
以下将说明各像素列ss的各峰候选位置和与该像素列ss相邻的像素列ss的峰位置pp之间的距离作为与各峰候选位置相对应的像素和与峰位置pp相对应的像素之间的距离。由于在像素列ss1中仅检测到与像素p1相对应的一个峰候选位置,因此图18的轮廓生成单元3选择与像素p1相对应的峰候选位置作为峰位置pp。
[0113]
图18中的距离计算单元6计算像素列ss2中的各个像素p2和p3与同像素列ss2相邻的像素列ss1中的像素p1之间的距离。在该示例中,像素p1和p3之间的距离短于像素p1和p2之间的距离。因此,针对像素列ss2,轮廓生成单元3选择同与相邻的像素列ss1中的像素p1
的距离最小的像素p3相对应的峰候选位置作为峰位置pp。
[0114]
同样,距离计算单元6计算像素列ss3中的各个像素p4和p5与同像素列ss3相邻的像素列ss2中的像素p3之间的距离。在该示例中,像素p3和p5之间的距离短于像素p3和p4之间的距离。因此,针对像素列ss3,轮廓生成单元3选择与像素p5相对应的峰候选位置作为峰位置pp。
[0115]
距离计算单元6计算像素列ss4中的各个像素p6和p7与同像素列ss4相邻的像素列ss3中的像素p5之间的距离。在该示例中,像素p5和p7之间的距离短于像素p5和p6之间的距离短。因此,针对像素列ss4,轮廓生成单元3选择与像素p7相对应的峰候选位置作为峰位置pp。图18的轮廓生成单元3基于针对各像素列ss所选择的峰位置pp来生成轮廓数据。
[0116]
如上所述,在本实施例中,在任何像素列ss中检测到多个峰的情况下,轮廓生成单元3判断在x2方向上与该像素列ss相邻的像素列ss中的峰候选位置和所检测到的多个峰候选位置之间的相对位置关系。在判断相对位置关系时,距离计算单元6计算各像素列ss的多个峰候选位置中的各峰候选位置和在x2方向上与该像素列ss相邻的像素列ss的峰候选位置之间的距离。轮廓生成单元3基于所计算出的距离来判断峰候选位置之间的相对位置关系。在这种情况下,也可以容易地判断相对位置关系。
[0117]
尽管在本实施例中已经说明了针对各像素列ss选择与相邻的像素列ss中的峰位置pp的距离最小的峰候选位置作为峰位置pp,但本发明不限于此。与图16的变形例相同,轮廓获取单元224还可以包括参数获取单元5。在这种情况下,轮廓生成单元3基于使用距离计算单元6所计算出的与相邻的像素列ss中的峰位置pp的距离以及参数获取单元5所获取到的参数的综合判断来选择峰位置pp。
[0118]
[3]第三实施例
[0119]
将说明根据第三实施例的光学位移计500和根据第一实施例的光学位移计500之间的不同之处。图20是示出根据第三实施例的轮廓获取单元224的结构的框图。如图20所示,在本实施例中,代替图12的簇生成单元2,轮廓获取单元224包括图案生成单元7和相关计算单元8。
[0120]
在第一操作模式中,图案生成单元7基于峰检测单元1所检测到的多个峰候选位置来生成几何图案。几何图案包括直线和弧线等。相关计算单元8计算图案生成单元7所生成的几何图案和峰检测单元1所检测到的多个峰候选位置之间的相关系数。
[0121]
轮廓生成单元3基于相关计算单元8所计算出的相关系数来从各像素列ss的多个峰候选位置中选择峰位置pp。在本实施例中,针对各像素列ss,选择与所生成的几何图案的相关系数最大的峰候选位置作为峰位置pp。
[0122]
图21a和21b是用于说明根据第三实施例的第一操作模式中的轮廓获取单元224的操作的图。图20的峰检测单元1检测各像素列ss的峰候选位置。在该示例中检测到的峰候选位置与图13所示的峰候选位置相同。
[0123]
如图21a所示,图20的图案生成单元7基于峰检测单元1所检测到的多个峰候选位置来生成直线状的几何图案。在图21a的示例中,在排除与其它峰候选位置不连续的孤立峰候选位置(与图14的簇c2~c9相对应的峰候选位置)的状态下,进行几何图案的生成。
[0124]
接着,图20的相关计算单元8计算图案生成单元7所生成的图21a的几何图案和峰检测单元1所检测到的图13的多个峰候选位置之间的相关系数。针对各像素列ss,图20的轮
廓生成单元3选择与所生成的几何图案的相关系数最大的峰候选位置作为峰位置pp。在图21b的示例中,利用点图案来指示与所选择的峰候选位置相对应的受光单元121的像素p。
[0125]
如上所述,在本实施例中,轮廓生成单元3判断在x2方向上至少与像素列ss相邻的像素列ss中的峰候选位置和所检测到的多个峰候选位置之间的相对位置关系。在判断相对位置关系时,图案生成单元7基于所检测到的多个峰候选位置来生成几何图案。相关计算单元8针对多个像素列ss中的各像素列ss,计算所生成的几何图案和所检测到的多个峰候选位置之间的相关系数。基于所计算出的相关系数来判断峰候选位置之间的相对位置关系。在这种情况下,也可以容易地判断相对位置关系。
[0126]
尽管在本实施例中已经说明了针对各像素列ss选择与所生成的几何图案的相关系数最大的峰候选位置作为峰位置pp,但本发明不限于此。与图16的变形例相同,轮廓获取单元224还可以包括参数获取单元5。在这种情况下,轮廓生成单元3基于使用相关计算单元8所计算出的相关系数和参数获取单元5所获取到的参数的综合判断来选择峰位置pp。
[0127]
[4]权利要求书的要素和实施例的要素之间的对应关系
[0128]
以下将说明权利要求书的要素和实施例的要素之间的对应关系的示例,但本发明不限于以下示例。可以使用具有权利要求书中所述的结构或功能的各种其它要素作为权利要求书的要素。
[0129]
工件w是测量对象的示例,光学位移计500是光学位移计的示例,光投射单元110是光投射单元的示例,x2方向是第一方向的示例,并且z2方向是第二方向的示例。像素p是像素的示例,像素列ss是像素列的示例,受光单元121是受光单元的示例,并且峰检测单元1是峰检测单元的示例。
[0130]
轮廓生成单元3是轮廓生成单元的示例,切换单元225是切换单元的示例,参数获取单元5是参数获取单元的示例,并且簇生成单元2是簇生成单元的示例。距离计算单元6是距离计算单元的示例,图案生成单元7是图案生成单元的示例,相关计算单元8是相关计算单元的示例,并且滤波处理单元4是滤波处理单元的示例。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1