一种基于时空最优关联匹配的多目标实时交会测量方法
本发明属于空中目标观测领域,具体涉及一种基于时空最优关联匹配的多目标实时交会测量方法。
背景技术:
1、利用光学经纬仪实现交会测量,获取飞行目标的三维坐标、速度、加速度等时空信息,已经广泛应用于空中目标观测领域。此类交会测量系统至少需要包括2台经纬仪,每台经纬仪分别测得目标的方位角和俯仰角,基于经纬仪的空间坐标,利用双站或多站交会的方式,可完全确定飞行目标在某一时刻的空间位置。该测量系统具有测量精度高、同时可观测多个目标等优势。然而,在多目标交会测量中,多目标像点的帧间关联和站间匹配是难点,关联和匹配的准确率对交会测量精度的影响非常大。因此,多目标像点的帧间关联和站间匹配是多目标交会测量的核心。
2、目前的多目标交会测量大多为事后交会处理算法,事后多目标交会处理算法研究重点主要集中于系统精度分析,坐标转换、交会测量的公式推导、站间像点匹配等方面。多数已有的实时交会测量算法仅是对单目标进行计算,针对多目标实时交会测量的算法较少。
3、如图1所示,在进行多目标像点帧间关联和站间匹配时会出现以下情况:①当探测器或检测处理单元未能分辨所有目标,或目标在测量坐标系下存在严重遮挡、粘连现象;②测量站测量数据存在一对多现象;③复杂成像背景出现假目标;④观测过程出现丢帧现象,都给多目标像点帧间关联和站间匹配带来困难。目前常用的多目标匹配算法有最大似然法、最小距离法、谱相关法、整数规划法,拉格朗日松弛算法以及神经网络等,但是这些算法在同时保证交会精度和实时性方面均存在局限性。
技术实现思路
1、本发明的目的是解决现有多目标实时交会测量方法,无法兼顾高精度和实时性的难题,而提供了一种基于时空最优关联匹配的多目标实时交会测量方法。
2、为达到上述目的,本发明采用的技术方案为:
3、一种基于时空最优关联匹配的多目标实时交会测量方法,其特殊之处在于,包括以下步骤:
4、步骤1、在待测空间建立若干个测量站,每个测量站分别测量并记录空间内每个时刻的目标像点数据;目标像点数据包括目标像点成像时间、目标像点相对每个测量站的方位角和俯仰角;
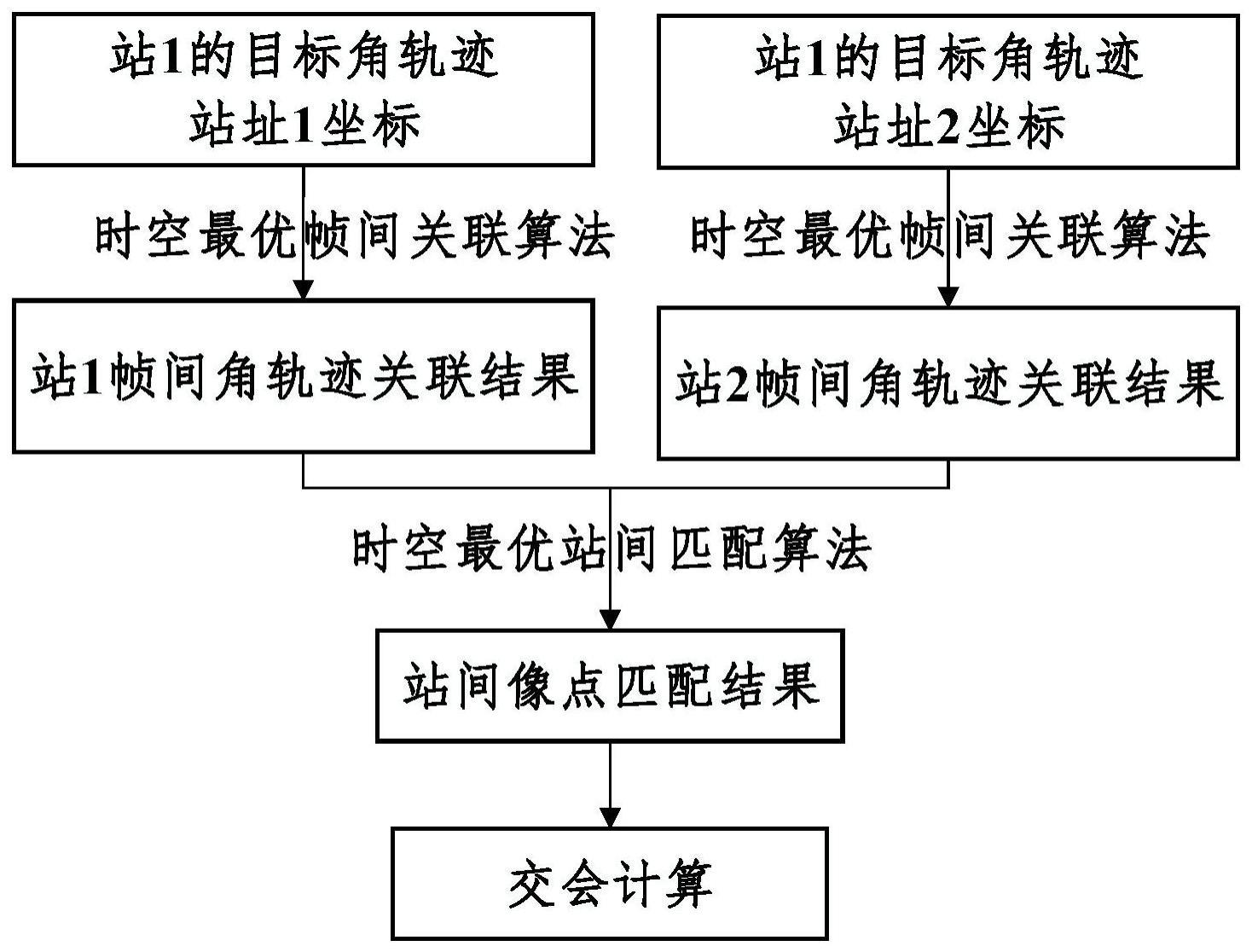
5、步骤2、每个测量站对获取的每个时刻的目标像点的数据进行时空最优帧间关联计算,得到每个测量站测量的目标像点的角轨迹关联结果;
6、步骤3、根据每个测量站测量的目标像点的角轨迹关联结果,进行时空最优站间匹配,得到每个目标像点的站间目标像点匹配结果;
7、步骤4、根据每个目标像点的站间目标像点匹配结果进行交会计算,得到目标在三维空间的坐标及运动速度。
8、进一步地,步骤2具体为:
9、2.1、每个测量站对获取的目标像点进行编号1,2,...,i,...,ni;
10、2.2、每个测量站分别建立目标像点成功关联的角轨迹集合,对获取的前两帧编号相同的目标像点关联,记为成功关联的角轨迹并予以编号1,2,...,j,...,mj,同时根据角轨迹中目标像点数据保存集合中角轨迹的方位角向量和俯仰角向量;
11、2.3、每个测量站对获取的当前时刻目标像点依次与成功关联的角轨迹集合中的角轨迹进行时空最优帧间关联;若成功关联,则赋予与目标像点的成功关联的角轨迹的编号;若未成功关联,则将该目标像点作为一条新的角轨迹加入轨迹集合中,并赋予角轨迹编号mj+c,且mj+c的数值大于ni;c≥1;
12、2.4、根据设定的角轨迹长度,以滑窗的方式填充角轨迹集合中的所有角轨迹的方位角向量和俯仰角向量;若角轨迹成功关联到新目标像点,则将新目标像点的方位角和俯仰角依次填充在相应的角轨迹的方位角向量和俯仰角向量中;若角轨迹未成功关联到新目标像点,则在相应的角轨迹的方位角向量和俯仰角向量中填充无穷大inf;
13、2.5、按照2.1~2.4的方法,测量站将获取的所有帧的目标像点进行时空最优帧间关联,获得每个测量站每个时刻的目标像点的角轨迹关联结果。
14、进一步地,步骤2.3具体为:
15、2.3.1、在成功关联的角轨迹集合中选择任一条角轨迹中的两个目标像点,与当前时刻的目标像点构成具有三个时间点的角轨迹;
16、2.3.2、计算选择的角轨迹与当前时刻的目标像点的方向一致性;
17、令选择任一条角轨迹中的两个目标像点为目标像点3,其坐标为(a3,e3)和目标像点4,其坐标为(a4,e4),当前时刻目标像点为目标像点5,其坐标为(a5,e5);角轨迹依次为:目标像点3、目标像点4到当前时刻目标像点5;其中,a3,a4,a5代表目标像点的方位角,e3,e4,e5代表目标像点的俯仰角;
18、计算角轨迹与当前时刻的目标像点的飞行方向一致性θ:
19、
20、
21、
22、
23、其中,表示目标像点3与目标像点4的距离的平方,表示目标像点4与当前时刻目标像点5的距离的平方;(a5-a4)(a4-a3)表示向量与向量在方位方向的距离乘积,(e5-e4)(e4-e3)表示向量与向量在俯仰方向的距离乘积,表示这两个乘积之和;向量为目标像点3与目标像点4组成的向量;向量为目标像点4与当前时刻目标像点5组成的向量;
24、2.3.3、计算选择的角轨迹与当前时刻的目标像点的飞行方向一致性阈值ε(θ*):
25、
26、其中,ε(ae*)为选择的角轨迹的误差上限;
27、2.3.4、计算选择的角轨迹与当前时刻的目标像点的飞行速度一致性v:
28、
29、其中,a为目标像点4与目标像点3的时刻差,b为目标像点4与当前时刻目标像点5的时刻差;
30、2.3.5、计算选择的角轨迹与当前时刻的目标像点的飞行速度一致性阈值ε(v*):
31、
32、2.3.6、以排列组合的方式从所选角轨迹中依次选取两个目标像点,按照步骤2.3.1~2.3.5的方法,计算选择的角轨迹中两个目标像点与当前时刻的目标像点的飞行方向一致性、飞行方向一致性阈值、飞行速度一致性以及飞行速度一致性阈值;
33、2.3.7、计算选择的角轨迹与当前时刻的目标像点的平均飞行方向一致性平均飞行方向一致性阈值平均飞行速度一致性以及平均飞行速度一致性阈值
34、2.3.8、计算选择的角轨迹与当前时刻的目标像点的平均飞行方向-速度一致性加权值
35、
36、其中,ρ为关联的权重系数,0≤ρ≤1;
37、2.3.9、计算选择的角轨迹与当前时刻目标像点的平均飞行方向-速度一致性加权阈值
38、
39、2.3.10、将当前时刻获取的所有目标像点与角轨迹集合中的角轨迹一一进行关联,按照2.3.1-2.3.9方法,得到当前时刻所有目标像点的平均飞行方向-速度一致性加权值矩阵和平均飞行方向-速度一致性加权阈值矩阵;
40、2.3.11、建立多目标帧间关联最优化模型;
41、
42、
43、其中,为当前时刻第i个目标像点与第j条角轨迹的平均飞行方向-速度一致性的加权值;
44、为第i个目标像点与第j条角轨迹的平均飞行-速度一致性加权阈值;
45、qij为0或1决策变量,表示第i个目标像点与第j条角轨迹的关联关系;若成功关联,则qij=1,若关联不成功,则qij=0;
46、2.3.12、利用匈牙利算法求得帧间关联结果,若成功关联,则赋予与目标像点的成功关联的角轨迹的编号;若未成功关联,则将该目标像点作为一条新的角轨迹加入轨迹集合中,并赋予角轨迹编号mj+c,且mj+c的数值大于ni;c≥1。
47、进一步地,步骤3具体为:
48、3.1、根据步骤2获得每个测量站各自测量的目标像点的角轨迹关联结果,以及每个测量站所有目标像点的方位角和俯仰角,分别计算每个测量站内目标像点的角轨迹单位矢量;
49、定义测量站s1的空间位置坐标为(x1,y1,z1),测量站s2的空间位置坐标为(x2,y2,z2),当前时刻测量站s1视场内任一目标像点o1相对于测量站s1的方位角和俯仰角为和测量站s2视场内任一目标像点o2相对于测量站s2的方位角和俯仰角为和则
50、当前时刻目标像点o1相对于测量站s1的角轨迹单位矢量为:
51、
52、当前时刻目标像点o2相对于测量站s2的角轨迹单位矢量为:
53、
54、3.2、令l1为目标像点o1与测量站s1、测量站s2构成的平面,l2为目标像点o2与测量站s1、测量站s2构成的平面,计算目标像点o1所在的平面l1与像点o2所在的平面l2的夹角β:
55、
56、3.3、计算平面l1与平面l2的夹角自适应阈值ε(β*):
57、
58、其中,ε(xi*)为站址坐标x方向的测量误差上限,ε(yi*)为站址坐标y方向的测量误差上限,ε(zi*)为站址坐标z方向的测量误差上限,ε(ai*)为目标像点相对测量站方位角测量误差上限,ε(ei*)为目标像点相对测量站俯仰角测量误差上限;
59、3.4、按照步骤3.1-3.3的方法,计算当前时刻两个测量站所有目标像点所在平面之间的夹角矩阵,以及对应的夹角自适应阈值矩阵;
60、3.5、结合历史q帧的夹角及夹角自适应阈值矩阵,计算当前时刻两个测量站所有目标像点的平均夹角矩阵,以及对应的平均夹角自适应阈值矩阵;
61、3.6、建立多目标时空最优匹配模型;
62、
63、
64、其中,为当前时刻测量站s1第k个目标像点所在的平面与当前时刻测量站s2第l个目标像点所在的平面之间的夹角平均值;m和n分别为当前时刻测量站s1和测量站s2目标像点的个数;
65、为当前时刻测量站s1第k个目标像点所在的平面与当前时刻测量站s2第l个目标像点所在的平面之间的平均夹角自适应阈值;
66、pkl为0或1决策变量,表示测量站s1的第k个目标像点与测量站s2第l个目标像点的匹配关系;若匹配成功,则pkl=1,若匹配不成功,则pkl=0。
67、3.7、利用匈牙利算法求得每个目标像点的站间目标像点匹配结果。
68、进一步地,步骤2.3.4中,所述相邻角轨迹点的时刻相差为1。
69、进一步地,步骤2.2中,所述方位角向量和俯仰角向量的维数均为1×nmax,其中,nmax为可填充的角轨迹中目标像点的数量。
70、进一步地,步骤2.2中,nmax=3~7。
71、与现有技术相比,本发明具有的有益技术效果如下:
72、1、本发明提供的基于时空最优关联匹配的多目标实时交会测量方法,考虑系统测角误差,提出帧间自适应关联阈值,建立了多目标时空帧间关联最优化模型,可利用任意多帧目标运动信息进行多目标像点关联,提高了多目标帧间关联准确性。
73、2、本发明提供的基于时空最优关联匹配的多目标实时交会测量方法,考虑系统测角误差和测站误差,提出站间自适应匹配阈值,剔除了假目标,所设阈值无需因观测距离的变化而重新设置。考虑目标多帧运动信息,建立了多目标时空站间匹配最优化模型,利用复杂度低的匈牙利算法求解全局最优匹配结果,保证了多目标交会测量的高精度和实时性。
74、3、本发明提供的基于时空最优关联匹配的多目标实时交会测量方法,适用性更广泛,当探测器或检测处理单元未能分辨所有目标,或目标在测量坐标系下存在严重遮挡、粘连现象,或测量站测量数据存在一对多现象,或复杂成像背景出现假目标,或观测过程出现丢帧现象,仍然可以实现多目标的高准确率匹配。
75、4、本发明提供的基于时空最优关联匹配的多目标实时交会测量方法,先对二维目标像点进行匹配,再利用匹配结果计算目标三维轨迹,此方法计算量小,实现了输入数据出现断帧的异常情况处理,提高了算法的鲁棒性,且算法输入的约束条件少,算法普适性强。
- 还没有人留言评论。精彩留言会获得点赞!