一种基于普吕克矩阵的飞机侧偏解算方法与流程
1.本发明属于航空技术领域,尤其涉及一种基于普吕克矩阵的飞机侧偏解算方法。
背景技术:
2.随着电磁环境的日益复杂化,飞机依靠有源的导航信息的可靠性、可用性在大大的降低,应用视觉信息以及惯性信息进行飞机的着陆滑行是必要的,由于飞机在着陆滑行过程中的可用的信息仅有跑道的中线信息以及惯性信息,导致飞机着陆滑行存在安全隐患。
技术实现要素:
3.本发明解决的技术问题:利用跑道中线的视觉信息以及惯性信息,获取飞机相对跑道中心线的侧偏距,确保飞机的着陆滑行安全。
4.本发明的技术方案:一种基于普吕克矩阵的飞机侧偏解算方法,其特征在于,所述方法包括:
5.s1,获取飞机的惯性信息,并测量得到飞机前视摄像头至跑道平面的垂直距离;
6.s2,通过飞机前视摄像头获取实时视频,对所述实时视频中的图像建立像素坐标系;
7.s3,获取前视摄像头的内参矩阵;
8.s4,获取跑道中线两个端点的像素值;
9.s5,获取二维跑道中线的普吕克矩阵,并得到跑道中线像素坐标系的直线方程;
10.s6,通过飞机的惯性信息获取飞机机体坐标系至跑道坐标系的旋转矩阵;
11.s7,获取跑道中线在三维跑道坐标系向量,并得到跑道中线在三维跑道坐标系向量与二维跑道中线的普吕克矩阵的关系;
12.s8,根据s7得到的所述关系,计算得到飞机相对跑道的侧向距离。
13.进一步的,
14.s1具体为:通过飞机上的惯性设备获取飞机的惯性信息:俯仰角α、滚转角β、偏航角γ,并测量得到飞机前视摄像头至跑道平面的垂直距离h。
15.进一步的,s2具体为:通过飞机上的前视摄像头获取实时视频,从实时视频中拉取图像,建立图像中的像素坐标系:图像的左上角为像素坐标系的原点,u轴正方向指向右侧,v轴的正向指向正下方。
16.进一步的,s3具体为:利用摄像头标注工具,获取前视摄像头的内参矩阵k:
[0017][0018]
其中,f为相机焦距,dx为u轴方向每一个像素的物理大小,dy为v轴方向每一个像素的物理大小,(u0,v0)为图像的中心点像素坐标。
[0019]
进一步的,s4具体为:通过分割网络将跑道中线像素部分从背景中分割出来,并通过最大连通域算法,过滤噪声像素点,获取跑道中线两个端点的像素值(u1,v1),(u2,v2)。
[0020]
进一步的,s5中,根据图像的中心点像素坐标(u0,v0),跑道中线两个端点的像素值(u1,v1),(u2,v2),获取二维跑道中线的普吕克坐标为
[0021]
进一步的,s5中,得到跑道中线像素坐标系的直线方程具体为:
[0022][0023][0024]
其中m为跑道中线在像素坐标系的直线斜率。
[0025]
进一步的,s6具体为:
[0026]
通过俯仰角α,滚转角β,偏航角γ获取机体坐标至跑道坐标系的旋转矩阵r:
[0027][0028]
进一步的,s7具体为:
[0029]
跑道中线在三维跑道坐标系向量为跑道中线在三维跑道坐标系向量二维跑道中线的普吕克坐标满足以下关系其中α为待定系数,k为相机内参矩阵,t
x
为飞机相对跑道的纵向距离,ty为飞机相对跑道的侧向距离,tz为飞机相对跑道的高度,l
×
表示将向量l转换为对应的反对称矩阵;
[0030]
将已知量带入可得到
[0031][0032]
tz为相机相对跑道的垂直距离h,从而得到
作为飞机相对跑道的侧向距离。
[0033]
本发明技术方案是针对在卫星据止的情况下,设计了根据视觉信息计算飞机相对跑道中线距离的方法,通过普吕克矩阵计算找出在跑道坐标系的跑道中线向量与在像素坐标系下跑道中线向量的映射关系,将前视摄像头相对跑道的垂直距离与惯性信息作为输入,计算出飞机相对跑道中线的侧偏距。
附图说明
[0034]
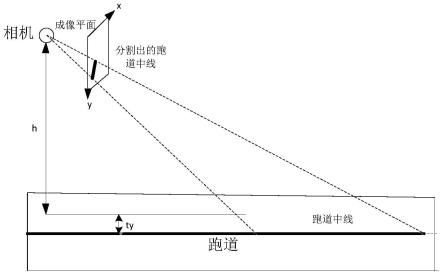
图1为本发明实施例提供的基于跑道中线求取飞机侧偏的示意图。
具体实施方式
[0035]
下面结合附图对本发明技术方案进行详细说明。
[0036]
本发明实施例提供一种基于普朗克矩阵的飞机侧偏解算方法,如图1所示,具体方案如下:
[0037]
1)通过飞机上的惯性设备获取惯性信息:俯仰角α,滚转角β,偏航角γ,测量飞机前视摄像头至跑道平面的垂直距离h;
[0038]
2)通过前视摄像头实时获取视频,从视频中拉取图像,规定图像中的像素坐标系,图像的左上角为像素坐标系的原点,u轴正方向指向右侧,v轴的正向指向正下方,建立像素坐标系
[0039]
3)利用摄像头标注工具,获取相机的内参矩阵k
[0040][0041]
其中,f为相机焦距,dx为u轴方向每一个像素的物理大小,dy为v轴方向每一个像素的物理大小,(u0,v0)为图像的中心点像素坐标。
[0042]
4)通过分割网络将跑道中线像素部分从背景中分割出来,并通过最大连通域算法,过滤噪声像素点,获取跑道中线两个端点的像素值(u1,v1),(u2,v2);
[0043]
5)根据图像的中心点像素坐标(u0,v0),跑道中线两个端点的像素值(u1,v1),(u2,v2),获取二维跑道中线的普吕克坐标为
[0044][0045]
跑道中线像素坐标系的直线方程:
[0046]
[0047][0048]
其中m为跑道中线在像素坐标系的直线斜率
[0049]
6)通过俯仰角α,滚转角β,偏航角γ可获取机体坐标至跑道坐标系的旋转矩阵r
[0050][0051]
7)跑道中线在三维跑道坐标系向量根据普吕克矩阵可获得与满足以下关系其中α为待定系数,k为相机内参矩阵,tx为飞机相对跑道的纵向距离,ty为飞机相对跑道的侧向距离,tz为飞机相对跑道的高度。
[0052]
8)将已知量带入可得到由于是着落滑行的飞机相对中线的侧偏,则tz为相机相对跑道的垂直距离h,得到
[0053][0054]
本发明技术方案是一中软件技术实现方案,通过上述技术方案已经应用实际飞行的视频素材进行验证,之后将该算法移植到视觉导航计算机中,进行试飞验证。
[0055]
通过对前视摄像机进行标定获取相机内参
[0056]
机上惯导实时输入俯仰角α,滚转角β,偏航角γ;
[0057]
确定前视摄像机相对跑道的垂直距离h=0.5m;
[0058]
通过分割网络实时获取跑道中线两端点在像素坐标系的像素坐标并计算从而得到斜率m;
[0059]
将上述所有输入带入实时计算ty。
[0060]
本发明技术方案是针对在卫星据止的情况下,设计了根据视觉信息计算飞机相对跑道中线距离的方法,通过普吕克矩阵计算找出在跑道坐标系的跑道中线向量与在像素坐标系下跑道中线向量的映射关系,将前视摄像头相对跑道的垂直距离与惯性信息作为输入,计算出飞机相对跑道中线的侧偏距。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1