一种实现高度误差分离的形貌测量装置及其系统
1.本实用新型涉及微纳计量领域,具体涉及一种实现高度误差分离的形貌测量装置及其系统。
背景技术:
2.随着科技进步和产业需求增长,出现了诸如晶圆、衬底、光学窗口、手机屏幕玻璃基板等大尺寸工件三维形貌的检测。其需求是在数百毫米的测量范围内,实现微米级甚至亚微米级的测量精度,其尺度比接近106,超出了绝大多数表面计量仪器的指标范围。以led芯片生长所用的蓝宝石衬底举例,其表面质量及形状精度是影响衬底产品质量的关键,对加工过程中的形貌测量追踪有助于工艺调整。衬底厚度(thickness)、厚度变化(ttv)也对于外延薄膜生长和加工成本的控制有极为重要的影响。对于以上低陡峭度工件测量过程中高度向精度要求往往达到微米和亚微米等级。
3.超大尺寸的表面形貌测量是传统计量学的一直以来的难点。在当前表面计量领域中的光学三维测量方法,如共焦显微镜(confocal microscope)和扫描相干显微镜(scanning coherence microscope)等,可实现亚微米至纳米级测量精度,然而其测量范围只有几百微米至几毫米,远不能满足诸如蓝宝石衬底材料的全域测量需求。因此,该领域研究的主要方向是大行程运动装置搭载高分辨率测头。为实现这一理念,在2000年加拿大维多利亚大学的bradley等学者就提出使用三坐标测量机的大行程定位装置搭载探针轮廓仪测头,实现跨尺度测量。2020年sensofar公司推出的新一代swide测量装置,二维平台可实现300mm横向扫描范围,测头采用机构光投影装置,单帧测量不确定度为2.5μm。然而,以上测量装置仅考虑了行程和测量空间要求,并未考虑运动装置本身引入的测量误差。大行程运动装置不可避免地引入运动直线度误差和平面度误差,这将对装置的精度特别是高度向精度带来不利影响。而三坐标测量机(cmm,coordinate measuring machine)本身具有高精度的运动和测量基准,如气浮导轨和大理石平台,因此传统三坐标测量机成本极为高昂,并且为保证精度还需要严苛的安装校正调试。
4.有鉴于此,提出本技术。
技术实现要素:
5.有鉴于此,本实用新型的目的在于提供一种实现高度误差分离的形貌测量装置及其系统,能够有效解决现有技术中的光学三维测量方案存在测量精度低,成本高昂的问题。
6.本实用新型公开了一种实现高度误差分离的形貌测量装置,包括二维运动模组、配置在所述二维运动模组上的测量桥组件、以及配置在所述测量桥组件上的高度误差分离模块;
7.其中,所述高度误差分离模块包括外置基准光学平晶以及误差光学测量组件,所述外置基准光学平晶独立固定在所述误差光学测量组件的上端,所述误差光学测量组件配置在所述测量桥组件的第一端面上,所述外置基准光学平晶的下表面与所述误差光学测量
组件的上表面耦合形成薄膜气隙,且所述测量桥组件会随着二维运动模组进行二维直线运动,进而带动所述误差光学测量组件进行二维直线运动;
8.其中,所述误差光学测量组件配置为采集所述外置基准光学平晶的下表面与所述误差光学测量组件发生靠近或远离的位移转值;
9.其中,所述位移转值用于补偿所述测量桥组件采集待测工件的形貌值。
10.优选地,所述误差光学测量组件包括激光器、棱镜、相机以及光屏,所述激光器配置在所述测量桥组件的第一端面上,所述激光器的发光端与所述棱镜的第一端面邸接,所述相机配置在所述测量桥组件的第一端面上,所述光屏配置在所述相机的摄像头的前端,且所述光屏与所述棱镜的第二端面相对,所述棱镜的第三端面与所述外置基准光学平晶的下表面耦合形成薄膜气隙。
11.优选地,所述测量桥组件包括配置在所述二维运动模组上的测量桥架、配置在所述测量桥架开口侧上方的第一测头以及配置在所述测量桥架开口侧下方的第二测头,待测工件放置在所述第一测头的测量端与所述第二测头的测量端之间,且所述高度误差分离模块的测量点与所述第一测头的测量点和所述第二测头的测量点轴向共线。
12.优选地,所述第一测头为confocaldt 2422彩色共焦测头。
13.优选地,所述第二测头为confocaldt 2422彩色共焦测头。
14.本实用新型还提供了一种实现高度误差分离的形貌测量系统,包括终端以及如上任意一项所述的一种实现高度误差分离的形貌测量装置,所述二维运动模组的输出端与所述终端的输入端电气连接,所述测量桥组件的输出端与所述终端的输入端电气连接,所述高度误差分离模块的输出端与所述终端的输入端电气连接。
15.综上所述,本实施例提供的一种实现高度误差分离的形貌测量装置及其方法、系统,由于设备的二维导轨在微观上是不平的,在对待测工件进行测量时,会存在高低起伏的变化,通过将所述外置基准光学平晶固定放置,就形成了一个参照物,在二维运动的过程中通过所述误差光学测量组件采集到的由于导轨不平引入的上下移动的误差,通过高度误差的获取对所述测量桥模块采集到的待测工件的形貌值进行补偿,从而解决现有技术中的光学三维测量方案存在测量精度低,成本高昂的问题。
附图说明
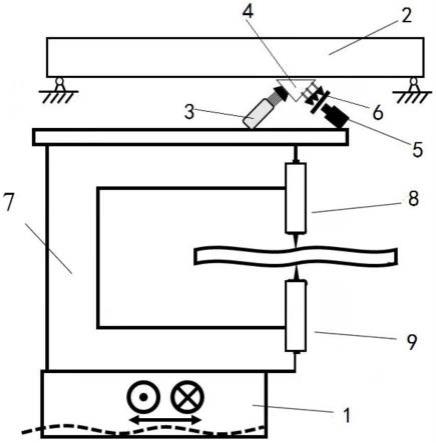
16.图1是本实用新型实施例提供的实现高度误差分离的形貌测量装置的结构示意图。
17.图2是本实用新型实施例提供的实现高度误差分离的形貌测量系统的结构示意图。
18.图3是本实用新型实施例提供的实现高度误差分离的形貌测量装置的高度误差分离模型示意图。
19.图4是本实用新型实施例提供的实现高度误差分离的形貌测量装置的干涉现象条纹移动的仿真图及测头共线示意图。
20.图5是本实用新型实施例提供的实现高度误差分离的形貌测量装置的薄膜干涉原理示意图。
具体实施方式
21.为使本实用新型实施方式的目的、技术方案和优点更加清楚,下面将结合本实用新型实施方式中的附图,对本实用新型实施方式中的技术方案进行清楚、完整地描述,显然,所描述的实施方式是本实用新型一部分实施方式,而不是全部的实施方式。基于本实用新型中的实施方式,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施方式,都属于本实用新型保护的范围。因此,以下对在附图中提供的本实用新型的实施方式的详细描述并非旨在限制要求保护的本实用新型的范围,而是仅仅表示本实用新型的选定实施方式。基于本实用新型中的实施方式,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施方式,都属于本实用新型保护的范围。
22.以下结合附图对本实用新型的具体实施例做详细说明。
23.请参阅图1至图3,本实用新型的第一实施例提供了一种实现高度误差分离的形貌测量装置,包括二维运动模组1、配置在所述二维运动模组1上的测量桥组件、以及配置在所述测量桥组件上的高度误差分离模块;
24.其中,所述高度误差分离模块包括外置基准光学平晶2以及误差光学测量组件,所述外置基准光学平晶2独立固定在所述误差光学测量组件的上端,所述误差光学测量组件配置在所述测量桥组件的第一端面上,所述外置基准光学平晶2的下表面与所述误差光学测量组件的上表面耦合形成薄膜气隙,且所述测量桥组件会随着二维运动模组1进行二维直线运动,进而带动所述误差光学测量组件进行二维直线运动;
25.其中,所述误差光学测量组件配置为采集所述外置基准光学平晶2的下表面与所述误差光学测量组件发生靠近或远离的位移转值;
26.其中,所述位移转值用于补偿所述测量桥组件采集待测工件的形貌值。
27.具体地,在本实施例中,所述误差光学测量组件在二维直线运动过程中,所述误差光学测量组件上表面与所述外置基准光学平晶2下表面产生的靠近或者远离的位移值转化为干涉图像,通过干涉图像来获得放大所述误差光学测量组件上表面与所述外置基准光学平晶2下表面产生的靠近或者远离产生的误差值,进而获得位移转值;根据得到的位移转值和所述测量桥组件采集的待测工件的形貌值,可以得到更加精准的待测工件的形貌值。
28.具体地,在本实施例中,被测样品置于载物台上,由于二维导轨在微观上是不平的,在对待测工件进行测量时,会存在高低起伏的变化,将所述外置基准光学平晶2作为测量基准独立放置,就形成了一个外置基准参照物,进行二维运动,对被测样品的上下表面进行同步扫描,实时跟踪测量过程在高度方向的运动误差,用于误差补偿,在整个过程中,所述测量桥组件带动刚性固定于其上的感知元件作为动子进行二维运动,置于载物台上的待测样品作为定子;在二维运动的过程中通过所述误差光学测量组件采集到的由于导轨不平引入的上下移动的误差,通过高度误差的获取对所述测量桥模块采集到的待测工件的形貌值进行补偿,被测样品可为如晶圆、衬底片、手机屏幕、光学窗口等低陡峭度工件。
29.具体地,在本实施例中,通过所述外置基准光学平晶2配合所述误差光学测量组件分离运动过程中误差对轴向精度影响,提高了测量精度、扩展了形貌测量的测量尺度比,放宽了精密形貌测量测量对导轨的要求、降低了测量装置的装调要求,控制测量系统的设计成本。同时所述误差光学测量组件配合所述外置基准光学平晶2可扩展测量系统的运动行程,实现大尺寸工件的高精度测量。
30.在本实施例中,所述二维运动模组1包括电机以及滚珠丝杠导轨滑轨,设备启动时,电机开始工作,并通过带动滚珠丝杠导轨滑轨进行二维直线运动,进而带动所述测量桥组件和所述误差光学测量组件进行前后左后平移的二维直线运动;其中,所述二维运动模组1可以选用高工传导公司行程350mm的二维电动位移模组和从动模组组成,其直线度≤
±
50μm。需要说明的是,在其他实施例中,还可以采用其他类型的二维运动模组1,这里不做具体限定,但这些方案均在本实用新型的保护范围内。
31.在本实施例中,外置基准精度上限决定了误差分离的精度上限,所述外置基准光学平晶2可以选择恒益光学公司光学平晶,所述光学平晶材质为石英材质,直径350mm,平面度≤0.05μm;可根据工件形貌的测量需求选择不同精度等级光学平晶基准。需要说明的是,在其他实施例中,还可以采用其他类型的外置基准光学平晶2,这里不做具体限定,但这些方案均在本实用新型的保护范围内。
32.在本实用新型一个可能的实施例中,所述误差光学测量组件包括激光器3、棱镜4、相机5以及光屏6,所述激光器3配置在所述测量桥组件的第一端面上,所述激光器3的发光端与所述棱镜4的第一端面邸接,所述相机5配置在所述测量桥组件的第一端面上,所述光屏6配置在所述相机5的摄像头的前端,且所述光屏6与所述棱镜4的第二端面相对,所述棱镜4的第三端面与所述外置基准光学平晶2的下表面耦合形成薄膜气隙。
33.请参阅图4至图5,具体地,在本实施例中,通过所述棱镜4的上表面和静止的所述外置基准光学平晶2的下表面发生耦合,则所述棱镜4和所述外置基准光学平晶2形成薄膜气隙,所述激光器3发生出的激光通过所述棱镜4与所述外置基准光学平晶2组成气隙的两个反射面由于光程差产生的干涉现象;所述光屏6上将出现明暗相间的干涉条纹。随着所述二维运动模组1进行二维运动时,由于驱动机构和从动机构的直线度等因素的影响,所述棱镜4与所述外置基准光学平晶2相互耦合过程中干涉条纹的变化会被所述相机5获取,经线缆传输到所述计算机保存和处理得到高度向误差数据。根据等厚干涉原理,随着所述棱镜4高度变化,即棱镜反射面与基准光学平晶反射面的距离变化,与干涉条纹的相位变化成线性。
34.在本实施例中,所述光屏6可以为可将像呈现在其中的毛玻璃,所述相机5可以为basler aca2000-165um面阵相机,感光芯片为cmos类型,靶面尺寸2/3",分辨率200万像素(2048
×
1088),最高帧速率可达165fps,搭配moritex公司ml-mc50hr微距镜头,焦距50mm,放大倍率在0.5~0.8的范围内,tv畸变小于0.07%。像素越高、像元越小能在图像处理中带来更高的分辨率,但是像素越高,图像所占内存越大,所用算力越高。该款工业相机在实现测量系统的同时,可兼顾图像处理速度的影响。所述激光器3可以为功率50mw,出瞳光束直径15mm、发散角0.1mrad、波长650nm单色红光光源。所述棱镜4为k9玻璃材质,尺寸30mm
×
30mm
×
30mm、表面面型为λ/10@632.8nm的直角棱镜。需要说明的是,在其他实施例中,还可以采用其他类型的误差光学测量组件,这里不做具体限定,但这些方案均在本实用新型的保护范围内。
35.在本实施例中,调整所述激光器3的激光的入射角度应保证激光光束到达棱镜与光学平晶反射面时应小于全反射的临界角,否则将不会出现干涉条纹;同时所述棱镜4与所述外置基准光学平晶2组成气隙的间距决定了干涉系统的最大量程,需根据运动系统导向机构直线度情况和运动范围合理的调整气隙的间距,实现运动系统工作距离的高度误差分
离。
36.在本实用新型一个可能的实施例中,所述测量桥组件包括配置在所述二维运动模组上的测量桥架7、配置在所述测量桥架7开口侧上方的第一测头8以及配置在所述测量桥架7开口侧下方的第二测头9,待测工件放置在所述第一测头8的测量端与所述第二测头9的测量端之间,且所述高度误差分离模块的测量点与所述第一测头8的测量点和所述第二测头9的测量点轴向共线。
37.具体地,在本实施例中,采用两个测头对工件进行测量,可获取被测样件的全三维形貌;为了避免测量过程对样品表面的损伤,测头可选择非接触式测头;所述第一测头8可以为confocaldt 2422彩色共焦测头;所述第二测头9可以为confocaldt 2422彩色共焦测头;彩色共焦测头,其基于多光谱轴向色散原理,该测头无需轴向机械结构辅助对焦即可获取工件高度方向(z向)三维形貌数据;对象测头分辨力优于20nm,测量范围2500μm。高精度的测头是决定形貌测量精度的决定性因素之一。更高精度的测头将带来更高的成本,需根据工件形貌的测量需求选择不同精度等级的测头。需要说明的是,在其他实施例中,还可以采用其他类型的测头,这里不做具体限定,但这些方案均在本实用新型的保护范围内。
38.在本实施例中,所述二维运动模组1搭载所述测量桥架作为动子进行二维运动,所述外置基准光学平晶2作为外置基准,将其作为分离运动过程中高度误差的外置基准放置于二维运动机台之上,将棱镜、工业相机、激光器、光屏独立、双测头固定在所述测量桥架中;所述棱镜4的上表面与所述外置基准光学平晶2的下表面形成薄膜气隙,调整所述激光器3的激光的入射角度,使激光光束可通过所述棱镜4与所述外置基准光学平晶2组成气隙的两个反射面产生的明暗相间干涉条纹呈现在所述光屏中;所述棱镜4在高度方向的变化相对于所述光屏6的干涉图像条纹开始滚动和旋转。
39.在本实施例中,所述实现高度误差分离的形貌测量装置,具有两个测头,此时将所述外置基准光学平晶2进行固定,只驱动所述测量桥组件和所述高度误差分离模块进行二维直线运动,可同时测量待测工件双面的形貌值。
40.本实用新型的第三实施例提供了一种实现高度误差分离的形貌测量系统,包括终端以及如上任意一项所述的一种实现高度误差分离的形貌测量装置,所述二维运动模组1的输出端与所述终端的输入端电气连接,所述测量桥组件的输出端与所述终端的输入端电气连接,所述高度误差分离模块的输出端与所述终端的输入端电气连接。
41.具体地,在本实施例中,所述终端控制二维运动机台二维运动,根据测头数据和所述高度误差分离装置采集的图像经过计算获取经过高度误差分离后的形貌信息。
42.以上仅是本实用新型的优选实施方式,本实用新型的保护范围并不仅局限于上述实施例,凡属于本实用新型思路下的技术方案均属于本实用新型的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1