用于水下机器人的滤网的位置检测组件和水下机器人的制作方法
1.本技术涉及水下机器人技术领域,具体而言,涉及一种用于水下机器人的滤网的位置检测组件和水下机器人。
背景技术:
2.随着时间的推移,泳池的底部在使用的过程中难免会沉淀诸多杂物,如落叶、树枝、塑料袋、碎石等,如果对这些杂物放任不管,则泳池的水质会受到污染。不仅如此,尖锐的杂物还会危及游泳者的身体健康。由于水下环境错综复杂,且水下视力受限,对这些杂物清洁的过程中,如果采用人工清洁的方式,清洁效率难以得到保障,而如果选择将泳池中的水抽取后进行清洁,则又会产生不小的开销。
3.目前在泳池清洁的市场上,利用水下机器人进行泳池清洁的呼声越来越大。由于受到水下机器人的进水口的尺寸限制,水下机器人在对泳池进行清洁的过程中,需要遴选出合适尺寸的杂物进行清洁,以免杂物的体积过大导致堵塞进水口。因此水下机器人通常在进水口处设置有滤网,水下机器人通过滤网过滤掉大体积的杂物,然后再对合适尺寸的杂物进行清洁收纳。
4.然而,目前市面上的水下机器人很少或没有配置有滤网在位检测装置,往往是简单的对滤网进行机械上的连接,而不设置有二次的在位检测。如果水下机器人工作的过程中,对滤网进行了漏装,则会导致水下机器人在清洁的过程中失去过滤效果,容易导致水下机器人的卡堵。而如果滤网没有正确的安装到位,则会导致部分水流未经过滤网过滤就被吸入或排出,使得水下机器人的清洁效果大打折扣。
5.在所述背景技术部分,公开的上述信息仅用于加强对本技术的背景的理解,因此它可以包括不构成对本领域普通技术人员已知的现有技术信息。
技术实现要素:
6.本公开至少提供一种用于水下机器人的滤网的位置检测组件和水下机器人。
7.第一方面,本公开的至少一个实施例提供一种用于水下机器人的滤网的位置检测组件,所述滤网可拆卸地设置于所述水下机器人的进水口,所述位置检测组件包括:位置感测磁铁,设置于所述滤网的内部;信号检测元件,设置于所述水下机器人的第一隔水容置腔内,且所述信号检测元件的检测范围覆盖所述进水口;其中,当所述滤网安装到位于所述进水口时,所述信号检测元件检测到所述位置感测磁铁的位置信息并发出安装到位信号。
8.第二方面,本公开的至少一个实施例提供一种水下机器人,所述水下机器人包括:壳体,具有进水口;滤网,可拆卸地设置于所述进水口;以及第一方面实施例中的用于水下机器人的滤网的位置检测组件。
9.例如,在本公开的第一方面和第二方面的一些实施例中,所述信号检测元件为霍尔元件或干簧管。
10.例如,在本公开的第一方面和第二方面的一些实施例中,所述滤网的内部具有第
二隔水容置腔,所述位置感测磁铁设置于所述第二隔水容置腔内。
11.例如,在本公开的第一方面和第二方面的一些实施例中,所述位置感测磁铁包括阵列设置的多组磁铁。
12.例如,在本公开的第一方面和第二方面的一些实施例中,所述滤网包括:滤网本体,所述位置感测磁铁设置于所述滤网本体的内部;限位部,设置于所述滤网本体,当所述滤网本体安装到位于所述进水口后,所述滤网本体通过所述限位部锁紧至所述水下机器人的壳体。
13.例如,在本公开的第一方面和第二方面的一些实施例中,所述壳体具有呈圆弧状的内凹段;所述滤网本体具有呈圆弧状的耦合段,所述滤网本体通过所述耦合段可旋转的设置于所述内凹段的内壁。
14.例如,在本公开的第一方面和第二方面的一些实施例中,所述水下机器人还包括:驱动轮,所述驱动轮与所述内凹段的外壁相互匹配。
15.例如,在本公开的第一方面和第二方面的一些实施例中,所述水下机器人还包括:垃圾收集仓,设置于所述壳体内,所述垃圾收集仓与所述滤网连通;吸水泵,设置于所述壳体内,所述吸水泵与所述垃圾收集仓连通,通过所述吸水泵产生的负压将水中的垃圾经由所述滤网过滤后吸入所述垃圾收集仓内。
16.例如,在本公开的第一方面和第二方面的一些实施例中,所述水下机器人还包括:控制器,设置于所述第一隔水容置腔内,所述信号检测元件与所述控制器电性连接,所述信号检测元件检测所述位置感测磁铁的位置信息并传递至所述控制器。
17.本技术的用于水下机器人的滤网的位置检测组件,通过在滤网的内部集成位置感测磁铁,同时在水下机器人的第一隔水容置腔内设置信号检测元件,可以实现在水下作业的过程中,位置感测磁铁和信号检测元件不受水下作业环境的干扰。通过信号检测元件的实时检测,可以实时监控滤网的位置状态,使得滤网的安装效果稳定可靠。
18.应当理解的是,以上的一般描述和后文的细节描述仅是示例性的,并不能限制本技术。
附图说明
19.为了更清楚地说明本技术实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本技术的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
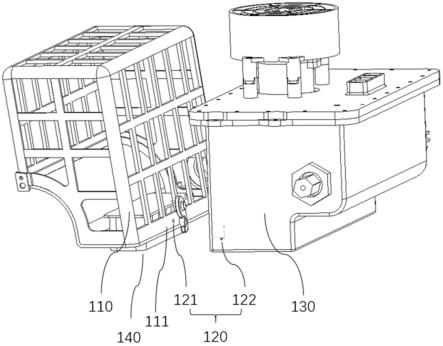
20.图1示出根据本技术示例实施例的用于水下机器人的滤网的位置检测组件的结构示意图。
21.图2示出根据本技术示例实施例的水下机器人的结构示意图。
22.图3示出根据本技术一些实施例的滤网的结构示意图。
23.图4示出根据本技术一些实施例的水下机器人的结构示意图。
具体实施方式
24.现在将参考附图更全面地描述示例实施例。然而,示例实施例能够以多种形式实
施,且不应被理解为限于在此阐述的实施例;相反,提供这些实施例使得本技术将全面和完整,并将示例实施例的构思全面地传达给本领域的技术人员。在图中相同的附图标记表示相同或类似的部分,因而将省略对它们的重复描述。
25.所描述的特征、结构或特性可以以任何合适的方式结合在一个或更多实施例中。在下面的描述中,提供许多具体细节从而给出对本公开的实施例的充分理解。然而,本领域技术人员将意识到,可以实践本公开的技术方案而没有这些特定细节中的一个或更多,或者可以采用其它的方式、组元、材料、装置等。在这些情况下,将不详细示出或描述公知结构、方法、装置、实现、材料或者操作。
26.附图中所示的流程图仅是示例性说明,不是必须包括所有的内容和操作/步骤,也不是必须按所描述的顺序执行。例如,有的操作/步骤还可以分解,而有的操作/步骤可以合并或部分合并,因此实际执行的顺序有可能根据实际情况改变。
27.本技术的说明书和权利要求书及上述附图中的术语“第一”、“第二”等是用于区别不同对象,而不是用于描述特定顺序。此外,术语“包括”和“具有”以及它们任何变形,意图在于覆盖不排他的包含。例如包含了一系列步骤或单元的过程、方法、系统、产品或设备没有限定于已列出的步骤或单元,而是可选地还包括没有列出的步骤或单元,或可选地还包括对于这些过程、方法、产品或设备固有的其他步骤或单元。
28.下文的公开提供了许多不同的实施方式或例子用来实现本技术的不同结构。为了简化本技术的公开,下文中对特定例子的部件和设置进行描述。当然,它们仅仅为示例,并且目的不在于限制本技术。此外,本技术可以在不同例子中重复参考数字和/或参考字母,这种重复是为了简化和清楚的目的,其本身不指示所讨论各种实施方式和/或设置之间的关系。此外,本技术提供了的各种特定的工艺和材料的例子,但是本领域普通技术人员可以意识到其他工艺的应用和/或其他材料的使用。
29.目前市面上的水下机器人很少或没有配置有滤网在位检测装置,往往是简单的对滤网进行机械上的连接,而不设置有二次的在位检测。如果水下机器人工作的过程中,对滤网进行了漏装,则会导致水下机器人在清洁的过程中失去过滤效果,容易导致水下机器人的卡堵。而如果滤网没有正确的安装到位,则会导致部分水流未经过滤网过滤就被吸入或排出,使得水下机器人的清洁效果大打折扣。
30.本技术的发明人发现,通过在滤网的内部集成位置感测磁铁,同时在水下机器人的第一隔水容置腔内设置信号检测元件,可以实现在水下作业的过程中,位置感测磁铁和信号检测元件不受水下作业环境的干扰。通过信号检测元件的实时检测,可以实时监控滤网的位置状态,使得滤网的安装效果稳定可靠。
31.以下结合附图对本技术的优选实施例进行说明,应当理解,此处所描述的优选实施例仅用于说明和解释本技术,并不用于限定本技术。
32.图1示出根据本技术示例实施例的用于水下机器人的滤网的位置检测组件的结构示意图。
33.参见图1,示例实施例的用于水下机器人的滤网110的位置检测组件120包括位置感测磁铁121和信号检测元件122。
34.位置感测磁铁121设置于滤网110的内部。信号检测元件122设置于水下机器人的第一隔水容置腔130内,且信号检测元件122的检测范围覆盖水下机器人的进水口140。
35.当滤网110安装到位于进水口140时,信号检测元件122检测到位置感测磁铁121的位置信息并发出安装到位信号。
36.第一隔水容置腔130为水下机器人内部相对独立的容置空间,用于设置水下机器人工作所需的电子元器件,如电源、传感器、供电线路等。信号检测元件122设置于第一隔水容置腔130内部与进水口140相邻的位置,使得信号检测元件122的检测范围得以覆盖进水口140周围的环境。在信号检测元件122工作的过程中,通过第一隔水容置腔130隔绝水流,使得信号检测元件122在无水环境中工作,使得信号检测元件122的工作更稳定,检测效果更精确。
37.第一隔水容置腔130可以是由密封隔水效果好、耐高压、信号穿透率高且绝缘的材料制备而成,如硅胶、mq树脂、沥青等,本技术与此不做具体限制。由于水下机器人长期工作于水下环境,即第一隔水容置腔130长期处于高水压的状态,使用耐高压的材料可以使得水下机器人的第一隔水容置腔130具有稳定的防渗透、防破碎性能。可以理解的是,第一隔水容置腔130用于设置水下机器人工作所需的电子元器件,使用绝缘材料制备可以壁面在电子元器件工作的过程中产生漏电、走电,进而壁面水下机器人在水下工作的过程中出现漏电现象。
38.同理,滤网110的内部具有第二隔水容置腔111,位置感测磁铁121设置于第二隔水容置腔111内。通过设置于第二隔水容置腔111,可以使得位置感测磁铁121壁面直接接触空气或水流,同时又不会影响信号检测元件122对位置感测磁铁121的检测效果。由于水下机器人长期处于水下工作环境,且滤网110位于水下机器人的进水口140,在工作的过程中,滤网110会长时间受到强水流的冲洗。如果位置感测磁铁121暴露于水流之中,势必会对位置感测磁铁121的磁性造成不利的影响,进而会影响到位置检测组件120的检测效果,通过将位置感测磁铁121设置于滤网110的第二隔水容置腔111内可以有效的避免这点。
39.滤网110可以是由密封隔水效果好、刚性大、耐高压、信号穿透率高、不易腐蚀的材料制备而成,如涂有防腐涂层的铝板、不锈钢等。由于滤网110长时间受到强水流的冲洗,在选材过程中,需要选用刚性大、不易腐蚀的材料来保证滤网110工作的稳定性。
40.可选地,滤网110呈栅栏状,滤网110具有阵列排布的多个长条型过滤孔,通过栅栏状的结构实现对大体积的杂物的拦截效果,使得合适尺寸的杂物能够通过过滤后进入水下机器人的内部进行清洁收纳。而在实际使用的过程中,也可以根据使用需求,对滤网110的结构进行改型,使得其具备对特定的杂物的清洁效果,本技术于此不做具体限制。
41.可选地,信号检测元件122为霍尔元件或干簧管。在滤网110安装到位后,信号检测元件122检测到感测磁铁121的位置信息,随后线路导通,信号检测元件122发出安装到位信号。而在滤网110并未安装到位时,信号检测元件122检测不到感测磁铁121的位置信息,根据实际应用过程中的运算逻辑,信号检测元件122的应对方式可以是不发出任何信号或发出未安装到位信号。
42.位置感测磁铁121包括阵列设置的多组磁铁,从而使得在位置感测磁铁121中的特定磁铁失效后,其余磁铁能够维持正常工作,使得本技术的位置检测组件120不至于因为特定磁铁失效而导致失去检测效果。进一步的,可以对位置感测磁铁121中的多组磁铁的磁性进行分级设置,信号检测元件122检测到不同磁铁时发出不同强度的检测信号,从而更精确的定位滤网110的位置状态。
43.图2示出根据本技术示例实施例的水下机器人的结构示意图。图3示出根据本技术一些实施例的滤网的结构示意图。
44.参见图2,示例实施例的水下机器人包括滤网110、位置检测组件120、壳体150和驱动轮160。
45.壳体150具有进水口140。滤网110可拆卸地设置于进水口140。
46.位置检测组件120包括位置感测磁铁121和信号检测元件122。
47.位置感测磁铁121设置于滤网110的内部。信号检测元件122设置于水下机器人的第一隔水容置腔130内,且信号检测元件122的检测范围覆盖水下机器人的进水口140。
48.当滤网110安装到位于进水口140时,信号检测元件122检测到位置感测磁铁121的位置信息并发出安装到位信号。
49.参见图3,滤网110包括滤网本体112和限位部113。位置感测磁铁121设置于滤网本体112的内部的第二隔水容置腔111内。限位部113设置于滤网本体112,当滤网本体112安装到位于进水口140后,滤网本体112通过限位部113锁紧至水下机器人的壳体150。
50.可选地,限位部113呈月牙状,可枢转的设置于滤网本体112,壳体150上具有对应的限位凸起151,随着限位部113的枢转,可以实现限位部113被锁紧限位于限位凸起151或被被空置。
51.壳体150具有呈圆弧状的内凹段152。与内凹段152对应的,滤网本体112具有呈圆弧状的耦合段1121,滤网本体112通过耦合段1121可旋转的设置于内凹段152的内壁。即,滤网本体112可以绕着圆弧状的内凹段152的内壁做转动,当滤网本体112转动至最低点时,滤网本体112可以通过限位部113锁紧至水下机器人的壳体150,此时滤网本体112处于安装到位的状态。在滤网本体112安装到位后,可以在进水口140设置诸如软胶片之类的格挡物,以防止水下机器人在行进的过程中杂物掉落。
52.当需要对滤网110或水下机器人内部进行清洗更换时,可以将滤网本体112沿着内凹段152的内壁向上转动,使得滤网110不再遮挡进水口140。
53.驱动轮160与内凹段152的外壁相互匹配,即由于内凹段152呈圆弧段,内凹段152的外壁形成了可以用于设置驱动轮160的放置槽,这种设计状态可以使得水下机器人的整体设计布局更为紧凑,实现轻量化的同时可以节约成本。
54.图4示出根据本技术一些实施例的水下机器人的结构示意图。
55.参见图4,一些实施例的水下机器人包括滤网110、位置检测组件120、壳体150、驱动轮160、垃圾收集仓170、吸水泵180和控制器190。
56.垃圾收集仓170设置于壳体150内,且垃圾收集仓170与滤网110连通。吸水泵180设置于壳体150内,且吸水泵180与垃圾收集仓170连通。在水下机器人工作的过程中,通过吸水泵180产生的负压将水中的垃圾经由滤网110过滤后吸入垃圾收集仓170内,从而实现水下机器人对泳池内杂物的过滤收集。
57.吸水泵180与垃圾收集仓170之间设置有过滤器,用于阻止进入到垃圾收集仓170的杂物通过吸水泵180与垃圾收集仓170之间的连通通道进入到吸水泵180之中,从而保证吸水泵180能够稳定高效的运转。
58.在本技术一些未公开的实施例中,吸水泵180也可以被替换为风机、吸盘等任意能提供负压的装置。
59.控制器190设置于第一隔水容置腔130内,且信号检测元件120与控制器190电性连接,信号检测元件120检测位置感测磁铁121的位置信息后,可以将检测到的位置信息传递至控制器190。
60.控制器190电性连接至驱动轮160,驱动轮160根据控制器190下达的移动信号可以带动水下机器人自移动。
61.以上对本技术实施例进行了详细描述和解释。应清楚地理解,本技术描述了如何形成和使用特定示例,但本技术不限于这些示例的任何细节。相反,基于本技术公开的内容的教导,这些原理能够应用于许多其它实施例。
62.最后应说明的是:以上所述仅为本公开的示例实施例而已,并不用于限制本公开,尽管参照前述实施例对本公开进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换。凡在本公开的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本公开的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1