自动分析装置的制作方法
1.本实用新型涉及一种自动分析装置。
背景技术:
2.自动分析装置是以生物化学检查项目、免疫检查项目、血凝检查项目等为对象,光学地对从被检体取样的试样与分析各检查项目的试剂的混合液进行测量并生成分析数据的装置。自动分析装置通过试剂库存放检测用的试剂,通过传送带输送收容标准试样或被检试样的试样容器,通过反应部对混合了试剂与标准试样的混合液或混合了试剂与被检试样的混合液进行测定。
3.在现有技术中,自动分析装置在对试样容器进行采样前,需要先通过打孔臂对试样容器进行穿孔。在穿孔时,打孔臂的探针会沾到试样,因此需要对打孔臂的探针进行清洗和干燥后才能再次使用。然而,对打孔臂的探针进行清洗和干燥的结构复杂,导致自动分析装置占用空间大、维护性差。另外,由于需要额外的清洗和干燥的动作,导致自动分析装置整体的工作效率变低。
技术实现要素:
4.本实用新型的目的在于提供一种在采样过程中不需要对开栓臂进行清洗和干燥的自动分析装置。
5.为了达到上述目的,本实用新型的实施方式的自动分析装置包括:试样容器,其被收容在以可移动的方式保持的试样架中,所述试样容器由瓶体和盖构成;开栓臂,其可转动到所述试样容器的上方或从所述试样容器的上方移开,所述开栓臂在转动到所述试样容器的上方时对所述试样容器进行开栓或封栓;以及试样分注臂,其对试样容器进行采样,其中,所述开栓臂包括:夹持部,其在纵向方向上设置在靠近所述试样架的位置或远离所述试样架的位置中的一方,并夹持所述瓶体或所述盖;开闭部,其在纵向方向上设置在靠近所述试样架的位置或远离所述试样架的位置中的另一方,并使所述盖与所述瓶体在纵向方向上分离;以及移动部,其与所述夹持部或所述开闭部中的在纵向方向上远离所述试样架的一方连接,并可将所述盖从所述瓶体上方移开或将所述盖移回到所述瓶体上方。
6.通过本实用新型,通过在自动分析装置中设置不与试样容器中的试样接触就可完成开栓动作的开栓臂,实现在采样过程中不需要对开栓臂进行清洗和干燥的效果。
附图说明
7.图1是表示本实用新型的自动分析装置的结构示意图;
8.图2是表示第一实施方式所涉及的自动分析装置的开栓臂的示意图;
9.图3是表示从图2中的a方向观察的示意图;
10.图4是表示第一实施方式所涉及的自动分析装置的开栓臂的另一示意图;
11.图5是表示第一实施方式所涉及的自动分析装置的开栓臂的又一示意图;
12.图6是表示第一实施方式所涉及的自动分析装置的开栓臂的开闭部的变形例的示意图;
13.图7是表示第一实施方式所涉及的自动分析装置的开栓臂的开闭部的变形例的另一示意图;
14.图8是表示第二实施方式所涉及的自动分析装置的开栓臂的示意图;
15.图9是表示从图8中的b方向观察的示意图;
16.图10是表示第二实施方式所涉及的自动分析装置的开栓臂的另一示意图;
17.图11是表示从图10中的c方向观察的示意图;
18.图12是表示第二实施方式所涉及的自动分析装置的开栓臂的又一示意图。
具体实施方式
19.以下,参照附图,对本实用新型所涉及的自动分析装置的实施方式进行说明。另外,在各图中,对同一结构标注相同符号。
20.为了便于说明,在图中示出了坐标轴。
21.将自动分析装置的长边方向定义为x轴方向(左右方向),将自动分析装置的短边方向定义为z轴方向(前后方向),将与z轴方向、x轴方向垂直的方向定义为y轴方向(纵向方向)。x轴箭头朝向的方向作为左侧(左方),与上述相对的即为右侧(或右方)。z轴箭头朝向的方向作为前侧(前方),与上述相对的即为后侧(后方)。y轴箭头朝向的方向作为上侧(上方),与上述相对的即为下侧(下方)。此外,在各图中,为了便于说明,将结构适当地放大、缩小或省略地表示。另外,为了清楚地说明本实用新型中的自动分析装置,省略了与本实用新型没有直接关系的部件。
22.(第一实施方式)
23.图1是表示本实用新型的自动分析装置1的结构示意图。
24.下面,通过图1对本实用新型的自动分析装置1的一种结构进行示例性的说明。
25.自动分析装置1是以生物化学检查项目、免疫检查项目、血凝检查项目等为对象,光学地对从被检体取样的试样与分析各检查项目的试剂的混合液进行测量并生成分析数据的装置。
26.如图1所示,自动分析装置1包括传送带2、试样分注臂21、试剂库3、试剂分注臂31、反应部4、搅拌臂41、开栓臂5、测定部6以及清洗部7。
27.传送带2以沿x轴方向(左右方向)延伸的方式设置,传送带2以可移动的方式保持试样架23。具体地,传送带2上设置有可沿传送带2的延伸方向移动的载置架22,载置架22上以可拆装地方式设置有试样架23,试样架23中收容有由瓶体和盖构成的试样容器9,传送带2通过载置架22将放置在载置架22上的试样架23沿x轴方向输送。
28.试剂库3内设置有环状的转动轨道,转动轨道上放置有收纳着试剂的试剂容器。试剂容器沿试剂库3的环状的转动轨道等间隔地配置。试剂库3以可旋转移动地方式保持环状的转动轨道。试剂库3对试剂容器进行保冷。
29.反应部4内设置有环状的转动轨道,转动轨道上放置有收纳着试样与试剂的混合液的反应容器。反应容器沿反应部4的环状的转动轨道等间隔地配置。反应部4以可旋转移动地方式保持环状的转动轨道。
30.试样分注臂21绕自身的与y轴平行的轴线以在反应部4与传送带2之间转动自如的方式设置。试样分注臂21的一端具有试样分注探针。试样分注探针伴随着试样分注臂21的转动而转动。试样分注探针的转动路径分别与传送带2上的试样架23中的试样容器9、反应部4内的反应容器的转动轨道交叉,试样分注探针的转动路径与传送带2上的试样架23中的试样容器9、反应部4内的反应容器的转动轨道的交叉点成为试样吸引位置、试样排出位置。
31.试样分注臂21对试样容器9进行采样,试样分注臂21在传送带2的试样容器9与反应部4的反应容器之间转送试样。试样分注臂21可沿纵向方向(y轴方向)升降,以使试样分注探针在试样吸引位置和试样排出位置之间沿纵向方向移动。试样分注探针抽吸位于试样吸引位置的试样容器9内的标准试样,并向反应部4中的位于试样排出位置的反应容器进行分注。另外,试样分注探针抽吸位于试样吸引位置的试样容器9内的被检试样,并向反应部4中的停止在试样排出位置的反应容器进行分注。
32.试剂分注臂31为绕自身的与y轴平行的轴线以在试剂库3与反应部4之间转动自如的方式设置。试剂分注臂31具有试剂分注探针。试剂分注探针伴随着试剂分注臂31的转动而转动。试剂分注探针的转动路径分别与试剂库3内的试剂容器的转动轨道、反应部4内的反应容器的转动轨道交叉,试剂分注探针的转动路径与试剂库3内的试剂容器的转动轨道、反应部4内的反应容器的转动轨道的交叉点成为试剂吸引位置、试剂排出位置。
33.试剂分注臂31在试剂库3的试剂容器与反应部4的反应容器之间转送试剂。试剂分注臂31可沿纵向方向(y轴方向)升降,以使试剂分注探针在试剂吸引位置和试剂排出位置之间沿纵向方向移动。试剂分注探针抽吸位于试剂吸引位置的试剂容器内的试剂,并向反应部4中的位于试剂排出位置的反应容器进行分注。
34.搅拌臂41在由试样分注探针排出标准试样或被检试样、试剂分注探针排出试剂后,搅拌反应部4中的停止在搅拌位置的反应容器内的标准试样与试剂的混合液或被检试样与试剂的混合液。
35.测定部6对反应部4中的反应容器内的混合液进行光学测定。测定部6对反应部4中的各个反应容器内的混合液照射光,测定部6检测透过反应部4中的反应容器内的混合液的光,并基于得到的检测信号生成例如以吸光度、吸光度的变化量表示的标准数据、被检数据。
36.清洗部7清洗由测定部6完成了测定的反应部4中的停止在清洗位置的反应容器。清洗部7具备废液喷嘴、清洗单元以及干燥喷嘴。清洗部7通过废液喷嘴抽吸反应部4中的反应容器内的作为废液的混合液。清洗部7利用清洗单元向抽吸过废液的反应容器排出清洗液以对反应容器进行清洗。清洗部7通过干燥喷嘴向清洗过的反应容器供给干燥空气,由此使反应容器干燥。
37.在现有技术中,自动分析装置在对试样容器进行采样前,需要先通过打孔臂对试样容器进行穿孔。在穿孔时,打孔臂的探针会沾到试样,因此需要对打孔臂的探针进行清洗和干燥后才能再次使用。然而,对打孔臂的探针进行清洗和干燥的结构复杂,导致自动分析装置占用空间大、维护性差。另外,由于需要额外的清洗和干燥的动作,导致自动分析装置整体的工作效率变低。
38.在本实用新型中,如图1所示,自动分析装置1还包括开栓臂5。开栓臂5绕自身的与y轴平行的轴线以在位于传送带2的试样架23的上方的位置与避开传送带2的试样架23的上
方的位置之间转动自如的方式设置,开栓臂5可转动到试样架23中的试样容器9的上方或从试样容器9的上方移开。当开栓臂5转动到试样容器9的上方时,将试样容器9的盖从瓶体移开(即对试样容器9进行开栓),在采样完成后,当开栓臂5再次转动回试样容器9的上方时,将试样容器9的盖移回到瓶体上(即对试样容器9进行封栓)。由于开栓臂5不会接触到试样容器9中的试样,因此本实用新型的自动分析装置1在采样过程中不需要对开栓臂5进行清洗和干燥。
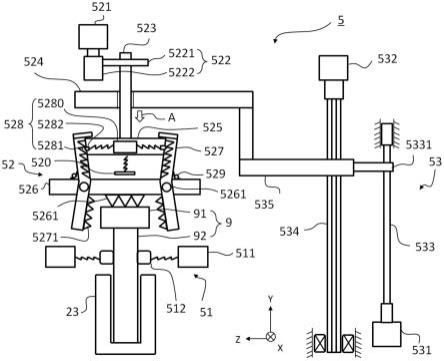
39.下面,通过图2、图3对第一实施方式中的自动分析装置1的开栓臂5的结构进行说明。
40.图2是表示第一实施方式所涉及的自动分析装置1的开栓臂5的示意图。
41.图3是表示从图2中的a方向观察的示意图。
42.如图2所示,在本实施方式中,试样容器9包括盖91以及瓶体92。开栓臂5包括夹持部51、开闭部52以及移动部53。
43.夹持部51在纵向方向(y轴方向)上设置在靠近试样架23的位置,夹持部51用于夹持试样容器9的瓶体92。
44.夹持部51包括电磁铁511(第一电磁铁)以及保持块512,在本实施方式中,电磁铁511为两个,保持块512为两块。两个电磁铁511隔着瓶体92设置在瓶体92的两侧,两个电磁铁511分别与两块保持块512连接。两块保持块512同样隔着瓶体92设置在瓶体92的两侧。两个电磁铁511分别使两块保持块512朝靠近瓶体92的方向伸出或朝远离瓶体92的方向收缩。当保持块512伸出时与瓶体92抵接,两块保持块512将瓶体92夹紧,当保持块512收缩时不与瓶体92接触,两块保持块512将瓶体92松开。也就是说,在电磁铁511的带动下,保持块512夹紧或松开瓶体92。为了增加保持块512与瓶体92的摩擦力,可以将保持块512形成为与瓶体92的外壁相互匹配的形状。另外,通过硅胶等材料形成保持块512,也可以实现增大摩擦力的效果。另外,由于电磁铁511的动作迅速,稳定性强,因此通过电磁铁511驱动保持块512将瓶体92夹持的方式,可以提高夹持部51夹持瓶体92的效率,并增强夹持试样容器9的瓶体92的稳定性。
45.开闭部52在纵向方向上设置在远离所述试样架23的位置,开闭部52可夹紧或松开试样容器9的盖91,开闭部52通过夹紧盖91并旋转盖91的方式,使盖91与瓶体92在纵向方向上分离。
46.开闭部52包括第一驱动部521、第一传动组522、第一丝杠523、支架524、压板525、支撑板526、两个连杆527、联动部528、复位部529以及传感器520(第一传感器)。
47.第一驱动部521固定设置,第一驱动部521为向外输出驱动力的部件,例如第一驱动部521为马达。第一传动组522与第一驱动部521连接,第一传动组522被第一驱动部521带动从而传递驱动力。如图2所示,作为一种具体的示例,第一传动组522由相互啮合的圆齿轮5221以及圆齿轮5222组成。圆齿轮5222与第一驱动部521的输出轴连接。
48.第一丝杠523的一端(+y方向上的一端)与第一传动组522固定连接。如图2所示,第一丝杠523的一端(+y方向上的一端)套设在圆齿轮5221中,第一丝杠523与圆齿轮5221刚性连接,第一丝杠523在圆齿轮5221的带动下可绕自身轴线旋转。
49.支架524上开设有螺纹孔,第一丝杠523贯插在支架524的螺纹孔中。由于第一丝杠523与支架524螺纹连接,因此当第一丝杠523在绕自身轴线旋转时,还可相对支架524沿纵
向方向升降。
50.压板525构成为沿纵向方向上宽下窄的楔形,压板525的较宽的一端(+y方向上的端部)与第一丝杠523的另一端(-y方向上的端部)固定连接。因此,当第一丝杠523绕自身轴线旋转时会带动压板525旋转;第一丝杠523沿纵向方向升降时会带动压板525沿纵向方向升降。
51.支撑板526为板状部件,支撑板526上设置有两根杆轴5261,杆轴5261的轴线与x轴平行,杆轴5261在支撑板526的支撑下可绕自身轴线自如旋转。
52.两个连杆527分别与支撑板526的两个杆轴5261连接,两个连杆527通过杆轴5261被支撑板526支撑,两个连杆527可以绕杆轴5261的轴线在yz平面内自如转动。以两个连杆527与杆轴5261的连接点为界限,两个连杆527的位于杆轴5261的上方的部分为两个连杆527的上部,两个连杆527的位于杆轴5261的下方的部分为两个连杆527的下部。两个连杆527的上部分别位于压板525的两侧,两个连杆527的上部隔着压板525相对设置。
53.在图3中,为了清楚说明相关结构,只示出了压板525以及两个连杆527。如图3所示,从压板525上方观察时,压板525的两侧形成有槽5251,两个连杆527的上部的一部分容纳在压板525的槽5251中。由此,当压板525被第一丝杠523带动而旋转时,两个连杆527与压板525共同旋转。
54.如图2所示,两个连杆527的下部用于夹持或松开试样容器9的盖91。两个连杆527的下部的相向的表面上形成有紧固部5271(第一紧固部)。两个连杆527通过绕杆轴5261转动夹紧或松开试样容器9的盖91。作为具体的例子,紧固部5271例如可以为多个齿状突起。
55.联动部528为限制两个连杆527是否随压板525在纵向方向上升降的部件,联动部528在联动状态下,使两个连杆527随压板525在纵向方向上升降,联动部528在非联动状态下,使两个连杆527不随压板525在纵向方向上升降。
56.如图2所示,作为一种具体的例子,联动部528包括电磁铁5280(第二电磁铁)、齿槽5281、销5282。电磁铁5280固定设置在压板525上。销5282为两个,两个销5282分别与电磁铁5280的两侧连接,两个销5282分别设置在电磁铁5280与两个连杆527之间。销5282可被电磁铁5280弹出或收回,电磁铁5280可以使两个销5282分别朝靠近两个连杆527的上部的方向弹出或分别朝远离两个连杆527的上部的方向收回。齿槽5281分别形成在两个连杆527的上部的相向的表面上,齿槽5281沿两个连杆527的延伸方向形成有多个,齿槽5281构成为与销5282匹配的形状,销5282与齿槽5281构成为棘轮结构。销5282在电磁铁5280带动下弹出时与两个连杆527的上部形成的齿槽5281卡合,销5282在电磁铁5280带动下收回时与齿槽5281脱离。在销5282与齿槽5281卡合后,压板525与两个连杆527的沿纵向方向的升高动作联动。由于销5282与齿槽5281构成的棘轮结构,在销5282与齿槽5281卡合后,当两个连杆527的沿纵向方向下降动作不被干涉时,压板525与两个连杆527的沿纵向方向的下降动作联动,但如果两个连杆527的沿纵向方向的下降动作受到干涉无法移动时,压板525脱离联动状态,仍可继续沿纵向方向下降,而两个连杆527不随压板525动作。
57.复位部529设置在支撑板526上,复位部529为两个,两个复位部529分别设置在两个连杆527的外侧,两个复位部529分别与两个连杆527连接。复位部529始终保持对两个连杆527施力,使两个连杆527的上部保持在夹持压板525的状态。作为具体的例子,复位部529例如为扭簧。
58.传感器520设置在压板525和支撑板526之间,传感器520对两个连杆527的下部夹紧盖91时的夹紧力进行检测。作为具体的例子,传感器520可以为压力传感器。
59.移动部53与开闭部52连接,移动部53通过绕与y轴平行的轴线在xz平面内转动,以将盖91从瓶体92上方移开或将盖91移回到瓶体92上方。
60.移动部53包括第二驱动部531、第三驱动部532、第二丝杠533、旋转轴534、旋转臂535。
61.第二驱动部531、第三驱动部532固定设置,第二驱动部531、第三驱动部532为向外输出驱动力的部件,例如第二驱动部531、第三驱动部532为马达。
62.第二丝杠533与第二驱动部531连接,第二丝杠533在第二驱动部531的带动下可绕自身轴线旋转。第二丝杠533上设置有滑块5331,滑块5331随第二丝杠533绕自身轴线的旋转而沿第二丝杠533的轴向方向(纵向方向)升降。
63.旋转轴534与第三驱动部532连接,旋转轴534在第三驱动部532的带动下可绕自身轴线旋转,旋转轴534以与第二丝杠533平行的方式设置。例如,旋转轴534可以为花键轴。
64.旋转臂535被旋转轴534贯插,旋转臂535随着旋转轴534绕自身轴线的旋转而旋转。旋转臂535的一端以可绕第二丝杠533上的滑块5331转动的方式与滑块5331连接,例如:滑块5331的周向上形成有齿,旋转臂535的朝向滑块5331的一端形成有与滑块5331上的齿匹配的齿。当旋转臂535随着旋转轴534旋转时滑块5331不转动,因此,旋转臂535绕滑块5331进行转动。旋转臂535在滑块5331的带动下可沿旋转轴534的轴向方向(纵向方向)升降。旋转臂535的另一端与开闭部52的支架524刚性连接,由此,移动部53通过旋转臂535可带动开闭部52的支架524在xz平面内转动或沿纵向方向升降。
65.下面,通过图1、图2、图4、图5对第一实施方式中的自动分析装置1的开栓臂5的动作过程进行说明。
66.图4是表示第一实施方式所涉及的自动分析装置1的开栓臂5的另一示意图。
67.图5是表示第一实施方式所涉及的自动分析装置1的开栓臂5的又一示意图。
68.在本实施方式中,在对试样容器9采样前,需要通过开栓臂5进行开栓动作。
69.如图1所示,首先,传送带2将保持有试样容器9的试样架23输送到开栓臂5附近,同时,如图2所示,夹持部51的电磁铁511将保持块512朝靠近试样容器9的瓶体92的方向伸出,通过保持块512将瓶体92夹紧。
70.之后,开栓臂5需要从图1中示出的避开试样容器9的上方的待机位置转动到图2中示出的位于试样容器9的上方的开栓位置。在本实施方式中,开栓臂5通过移动部53将开闭部52转动到试样容器9的上方。具体地,移动部53的第三驱动部532驱动旋转轴534旋转,旋转轴534带动旋转臂535以及开闭部52的支架524转动到试样容器9的上方。之后,开栓臂5通过移动部53将开闭部52沿纵向方向朝试样容器9的上方靠近。具体地,移动部53的第二驱动部531驱动第二丝杠533旋转,第二丝杠533带动滑块5331以及旋转臂535使开闭部52沿纵向方向下降(向试样容器9靠近)。
71.此时,联动部528使销5282保持在与齿槽5281卡合的状态。压板525、两个连杆527以及支撑板526共同下降。随着开闭部52的支撑板526与两个连杆527逐渐下降,支撑板526与试样容器9的盖91开始抵接。当支撑板526与盖91抵接后,支撑板526无法继续下降,两个连杆527由于与支撑板526通过杆轴5261连接,因此受到干涉同样无法继续下降。压板525由
于齿槽5281与销5282构成为棘轮结构因此可以继续下降。随着开闭部52的压板525逐渐下降,压板525将两侧的两个连杆527的上部逐渐撑开,两个连杆527绕杆轴5261转动,两个连杆527的下部逐渐收紧。
72.如图4所示,传感器520被挤压在支撑板526与压板525之间,随着压板525的下降,传感器520检测到的力逐渐变大。当压板525下降到使两个连杆527的下部将试样容器9的盖91夹紧后,传感器520检测到开闭部52下降到了规定的位置,从而发出信号,使移动部53的动作停止。
73.接着,如图5所示,开闭部52的第一驱动部521开始驱动第一传动组522并带动第一丝杠523绕自身轴线旋转。由于支架524与移动部53的旋转臂535刚性连接,因此支架524处于固定状态。第一丝杠523随着绕自身轴线的旋转带动压板525相对支架524沿纵向方向上升。此时,联动部528仍使销5282保持在与齿槽5281卡合的状态,因此两个连杆527随压板525联动上升。夹持着盖91的两个连杆527被压板525以及第一丝杠523带动,在旋转的同时上升,开闭部52将试样容器9的盖91与瓶体92分离,完成开栓动作。由于夹持盖91的两个连杆527为在旋转的同时还沿纵向方向上升,因此无论盖91是与瓶体92通过螺纹连接还是直接塞在瓶体92中,都可以实现将盖91与瓶体92分离的效果。另外,对于无螺纹的盖,也可以采用仅单独上升而不旋转的方式。
74.之后,移动部53通过第三驱动部532、旋转轴534、旋转臂535将开栓臂5的开闭部52转动回如图1所示的待机位置,避免干涉试样分注臂的采样。具体地,移动部53的第三驱动部532驱动旋转轴534旋转,旋转轴534带动旋转臂535以及开闭部52的支架524转动到避让试样分注臂采样的待机位置。当试样分注臂采样完成后,移动部53将开闭部52从待机位置重新转动到瓶体92的上方。进一步,也可以通过自动分析装置1的控制部,使开栓臂5从瓶体92的上方移开的同时,使试样分注臂21以与开栓臂5相互避让的方式朝瓶体92的上方转动。即通过自动分析装置1的控制部可以使开栓臂5与试样分注臂21以彼此相互避让的方式同时转动,以提高检测效率。第一驱动部521驱动第一传动组522并带动第一丝杠523绕自身轴线旋转,第一丝杠523随着绕自身轴线的旋转开始相对支架524沿纵向方向下降,开闭部52重新将试样容器9的盖91与瓶体92合并,完成封栓动作。
75.根据本实施方式,通过在自动分析装置中设置不与试样容器中的试样接触就可完成开栓动作的开栓臂,省去了原先复杂的清洗和干燥的结构,可以提高自动分析装置的工作效率。并且,由于只需要开栓臂一个结构,因此可以实现自动分析装置的小型化,改善自动分析装置的维护性。
76.另外,优选地,如图2、4、5所示,在支撑板526上的与试样容器9的盖91相向的表面上也形成有紧固部5262(第二紧固部)。作为具体的例子,紧固部5262例如可以为多个齿状突起。在支撑板526上形成紧固部5262可以进一步对试样容器9的盖91进行夹紧,提高分离盖91与瓶体92时的稳定性。
77.(第一实施方式变形例)
78.下面,通过图6、图7对第一实施方式的开栓臂5的变形例的结构进行说明。在各图中,为了更清楚表达本实施方式的结构,省略了与本实用新型没有直接关系的部件。在本变形例中与第一实施方式相同的部分不再赘述。仅针对不同的部分进行说明。其他未说明的部分均与第一实施方式相同或等同。
79.图6是表示第一实施方式所涉及的自动分析装置1的开栓臂5的开闭部52的变形例的示意图。
80.图7是表示第一实施方式所涉及的自动分析装置1的开栓臂5的开闭部52的变形例的另一示意图。
81.在本变形例中,与第一实施方式不同之处在于,由于试样容器9的盖91的尺寸有很多种,为了使开闭部52适配不同的试样容器9,开闭部52还包括滑块54以及施力部55。如图6所示,滑块54为两个,两个滑块54分别设置在两个连杆527的下部的相向的表面上,滑块54可在两个连杆527的下部沿纵向方向滑动。作为一种具体的例子,例如,在两个连杆527的下部分别形成滑槽,滑块54可沿两个连杆527的滑槽滑动。两个滑块54的隔着盖91相向的表面上形成有紧固部541(第三紧固部)。作为具体的例子,紧固部541例如可以为多个齿状突起。施力部55设置在滑块54与支撑板526之间,施力部55保持对滑块54施加使滑块54朝远离支撑板526的方向移动的力。施力部55例如可以为弹簧。
82.如图6所示,当试样容器9的盖91的尺寸较小时,两个连杆527的下部即使夹紧到了极限位置,也无法通过紧固部5271与小尺寸的盖91抵接。但在本变形例中,由于两个连杆527的下部还设置有滑块54,因此小尺寸的盖91可以被两个滑块54的紧固部541夹持,以实现如第一实施方式中说明的将盖91与瓶体92分离的动作。
83.如图7所示,当试样容器9的盖92的尺寸较大时,开闭部52在沿纵向方向下降时,大尺寸的盖92推动滑块54,使滑块54朝上移动,滑块54避让开两个连杆527的紧固部5271。随着两个连杆527的收紧,紧固部5271与大尺寸的盖92抵接,使大尺寸的盖92可以被两个连杆527夹持,以实现如第一实施方式中说明的将盖91与瓶体92分离的动作。
84.通过本变形例,无论试样容器的盖的尺寸大小,都可以实现将试样容器开栓和封栓的动作。
85.(第二实施方式)
86.下面,通过图8、图9以及图10对第二实施方式中的自动分析装置1的开栓臂5的结构进行说明。
87.图8是表示第二实施方式所涉及的自动分析装置1的开栓臂5的示意图。
88.图9是表示从图8中的b方向观察的示意图。
89.图10是表示第二实施方式所涉及的自动分析装置1的开栓臂5的另一示意图。
90.在本实施方式中与第一实施方式相同的部分不再赘述。仅针对不同的部分进行说明。其他未说明的部分均与第一实施方式相同或等同。
91.如图8所示,在本实施方式中,与第一实施方式相同,试样容器9包括盖91以及瓶体92。开栓臂5包括夹持部81、开闭部82以及移动部83。
92.如图8所示,与第一实施方式不同,在本实施方式中,夹持部81在纵向方向(y轴方向)上设置在远离试样架23的位置,夹持部81用于夹持试样容器9的盖91。
93.如图8所示,夹持部81包括第四驱动部811、第二传动组812、夹紧支架813、螺杆814。如图9所示,夹持部81还包括传感器815(第二传感器)。
94.如图8所示,第四驱动部811固定设置,第四驱动部811为向外输出驱动力的部件,例如第四驱动部811为马达。第二传动组812与第四驱动部811连接,第二传动组812被第四驱动部811带动从而传递驱动力。作为一种具体的示例,第二传动组812由相互啮合的锥齿
轮8121以及锥齿轮8122组成。锥齿轮8121与第四驱动部811的输出轴连接。
95.如图9所示,夹紧支架813为两个,两个夹紧支架813隔着第二传动组812相对设置,两个夹紧支架813的相向的表面上分别形成有紧固部8131(第四紧固部)。作为具体的例子,紧固部8131例如可以为多个齿状突起。两个夹紧支架813上分别形成有同轴的螺纹孔。两个夹紧支架813上的螺纹孔的旋向相反。
96.螺杆814通过螺纹贯通在两个夹紧支架813中,螺杆814的两端分别贯插在两个夹紧支架813的螺纹孔中。螺杆814与第二传动组812连接,螺杆814在第二传动组812的带动下绕自身轴线旋转。作为具体的例子,在本实施方式中,螺杆814套设在第二传动组812的锥齿轮8122中,螺杆814与锥齿轮8122相对固定,螺杆814随着锥齿轮8122的旋转而旋转。由于螺杆814与夹紧支架813螺纹连接并且两个夹紧支架813的螺纹孔的旋向相反,因此当螺杆814旋转时,会使两个夹紧支架813朝相互靠近的方向或相互远离的方向移动,当两个夹紧支架813相互靠近时,紧固部8131将盖91夹紧,当两个夹紧支架813相互远离时,紧固部8131将盖91松开。也就是说,螺杆814在第二传动组812带动下通过两个夹紧支架813夹紧或松开盖91
97.传感器815设置在两个夹紧支架813之间,传感器815对两个夹紧支架813之间的夹紧力进行检测。作为具体的例子,传感器815可以为压力传感器。
98.如图8所示,与第一实施方式不同,在本实施方式中,开闭部82在纵向方向(y轴方向)上设置在靠近试样架23的位置。开闭部82可夹紧或松开试样容器9的瓶体92,开闭部82通过夹紧瓶体92并旋转瓶体92的方式,使盖91与瓶体92在纵向方向上分离。
99.开闭部82包括第五驱动部821、第三传动组822、第三丝杠823、环形电磁铁824以及保持杆825。
100.第五驱动部821固定设置,第五驱动部821为向外输出驱动力的部件,例如第五驱动部821为马达。第三传动组822与第五驱动部821连接,第三传动组822被第五驱动部821带动从而传递驱动力。作为一种具体的示例,第三传动组822由相互啮合的圆齿轮8221以及圆齿轮8222组成。圆齿轮8221与第五驱动部821的输出轴连接。
101.第三丝杠823的一端(-y方向上的一端)与第三传动组822固定连接。第三丝杠823的一端(-y方向上的一端)套设在圆齿轮8222中,第三丝杠823与圆齿轮8222刚性连接,第三丝杠823在圆齿轮8222的带动下可绕自身轴线旋转。试样架23的底部形成有供第三丝杠823贯插的螺纹孔,第三丝杠823的另一端(+y方向上的一端)从试样架23的底部的螺纹孔贯插到试样架23中。由于第三丝杠823通过螺纹贯通在试样架23的底部,因此当第三丝杠823绕自身轴线旋转时,还相对试样架23沿纵向方向移动。
102.环形电磁铁824与第三丝杠823的另一端(+y方向上的一端)固定连接,环形电磁铁824设置在试样架23内,环形电磁铁824随着第三丝杠823绕自身轴线的旋转而旋转。环形电磁铁824分为上下两部分,环形电磁铁824可将上半部分沿纵向方向弹出或收缩。
103.保持杆825设置在环形电磁铁824上,保持杆825为两个,两个保持杆825间隔着试样容器9的瓶体92设置。两个保持杆825均套设在环形电磁铁824的上半部分中,两个保持杆825的下端(-y方向上的一端)可分别绕与x轴平行的两个转轴的轴线旋转,通过使保持杆825的下端绕与x轴平行的转轴的轴线旋转,两个保持杆825的上端(+y方向上的一端)可朝靠近瓶体92的方向移动或朝远离瓶体92的方向移动。如图8所示,当环形电磁铁824的上半部分沿纵向方向收缩时,两个保持杆825被环形电磁铁824的上半部分松开,两个保持杆825
不与瓶体92接触。如图10所示,当环形电磁铁824的上半部分沿纵向方向弹出时,两个保持杆825被环形电磁铁824的上半部分收紧并与瓶体92的两侧抵接,保持杆825在环形电磁铁824的带动下夹紧瓶体92。为了增加保持杆825与瓶体92的摩擦力,可以将保持杆825的上端形成为与瓶体92的外壁相互匹配的形状。另外,通过硅胶等材料形成保持杆825,也可以实现增大摩擦力的效果。另外,由于环形电磁铁824的动作迅速,稳定性强,因此通过环形电磁铁824驱动保持杆825将瓶体92夹持的方式,可以提高开闭部82夹持瓶体92的效率,并增强夹持试样容器9的瓶体92的稳定性。
104.另外,在本实施方式中,当两个保持杆825没有被环形电磁铁824收紧时,不会阻碍瓶体92的取放。因此,不需要特别设置复位部。但是也可以通过增设复位部提高装置的动作效率。例如,如图8所示,在环形电磁铁824上设置复位部826,复位部826为两个,两个复位部826分别设置在两个保持杆825的外侧,两个复位部826分别与两个保持杆825连接。复位部826对保持杆825施加使两个保持杆825的上端相互远离的力,复位部826使保持杆825松开瓶体92。作为具体的例子,复位部826例如为扭簧。
105.如图8所示,在本实施方式中,与第一实施方式相同,移动部83包括第二驱动部831、第三驱动部832、第二丝杠833、旋转轴834、旋转臂835。移动部83通过绕与y轴平行的轴线在xz平面内转动,以将盖91从瓶体92上方移开或将盖91移回到瓶体92上方。
106.如图8所示,在本实施方式中,与第一实施方式不同,移动部83通过旋转臂835与夹持部81的夹紧支架813固定连接。除此以外,移动部83的其余结构与第一实施方式完全相同,因此不再赘述。
107.下面,通过图1、图9、图10、图11、图12对第二实施方式中的自动分析装置1的开栓臂5的动作过程进行说明。
108.图11是表示从图10中的c方向观察的示意图;
109.图12是表示第二实施方式所涉及的自动分析装置的开栓臂的又一示意图。
110.在本实施方式中,在对试样容器9采样前,需要通过开栓臂5进行开栓动作。
111.如图1所示,首先,传送带2将保持有试样容器9的试样架23输送到开栓臂5附近,同时,如图10所示,环形电磁铁824的上半部分弹出,保持杆825的上端朝靠近瓶体92的方向移动,保持杆825将瓶体92夹紧。
112.之后,开栓臂5需要从图1中示出的避开试样容器9的上方的待机位置转动到图10中示出的位于试样容器9的上方的开栓位置。在本实施方式中,开栓臂5通过移动部83将夹持部81转动到试样容器9的上方。具体地,移动部83的第三驱动部832驱动旋转轴834旋转,旋转轴834带动旋转臂835以及夹持部81的夹紧支架813转动到试样容器9的上方。之后,开栓臂5通过移动部83将夹持部81沿纵向方向朝试样容器9的上方靠近。具体地,移动部83的第二驱动部831驱动第二丝杠833旋转,第二丝杠833带动滑块8331以及旋转臂835使夹持部81沿纵向方向下降(向试样容器9靠近)。如图9所示,此时,夹持部81的两个夹紧支架813处于不与盖91抵接的状态。
113.接着,如图10所示,夹持部81的第四驱动部811驱动第二传动组812并带动螺杆814绕自身轴线旋转。如图9所示,由于螺杆814与两个夹紧支架813螺纹连接,因此,随着螺杆814的旋转,两个夹紧支架813分别朝靠近盖91的方向移动,传感器815被挤压在两个夹紧支架813之间。如图11所示,螺杆814持续旋转,直到夹紧支架813通过紧固部8131将盖91夹紧。
此时,传感器815检测到夹持部81已经将盖91夹紧,从而发出信号,使夹持部81的动作停止。
114.接着,如图12所示,第五驱动部821驱动第三传动组822并带动第三丝杠823旋转,此时试样架23处于固定状态。第三丝杠823随着绕自身轴线的旋转开始相对试样架23沿纵向方向下降。于是,夹持着试样容器9的瓶体92的保持杆825被环形电磁铁824以及第三丝杠823带动,在旋转的同时下降,开闭部82将试样容器9的盖91与瓶体92分离,完成开栓动作。由于保持杆825在旋转的同时使瓶体92下降,因此无论盖91是与瓶体92通过螺纹连接还是直接塞在瓶体92中,都可以实现将盖91与瓶体92分离的效果。另外,对于无螺纹的盖,也可以采用仅单独上升而不旋转的方式。
115.之后,移动部83通过第三驱动部832、旋转轴834、旋转臂835将夹持部81转动到待机位置,避免干涉试样分注臂的采样。具体地,移动部83的第三驱动部832驱动旋转轴834旋转,旋转轴834带动旋转臂835以及夹持部81的夹紧支架813转动到避让试样分注臂采样的待机位置。当试样分注臂采样完成后,移动部83将夹持部81从待机位置重新转动到瓶体92的上方。进一步,也可以通过自动分析装置1的控制部,使开栓臂5从瓶体92的上方移开的同时,使试样分注臂21以与开栓臂5相互避让的方式朝瓶体92的上方转动。即通过自动分析装置1的控制部可以使开栓臂5与试样分注臂21以彼此相互避让的方式同时转动,以提高检测效率。第五驱动部821驱动第三传动组822并带动第三丝杠823绕自身轴线旋转,第三丝杠823随着绕自身轴线的旋转开始相对试样架23沿纵向方向上升,开闭部82重新将试样容器9的盖91与瓶体92合并,完成封栓动作。
116.根据本实施方式,通过在自动分析装置中设置不与试样容器中的试样接触就可完成开栓动作的开栓臂,省去了原先复杂的清洗和干燥的结构,可以提高自动分析装置的工作效率。并且,由于只需要开栓臂一个结构,因此可以实现自动分析装置的小型化,改善自动分析装置的维护性。
117.以上说明的任一实施方式都可以如下表达,
118.一种自动分析装置,包括:
119.试样容器,其被收容在以可移动的方式保持的试样架中,所述试样容器由瓶体和盖构成;
120.开栓臂,其可转动到所述试样容器的上方或从所述试样容器的上方移开,所述开栓臂在转动到所述试样容器的上方时对所述试样容器进行开栓或封栓;以及
121.试样分注臂,其对试样容器进行采样,
122.其中,所述开栓臂包括:
123.夹持部,其在纵向方向上设置在靠近所述试样架的位置或远离所述试样架的位置中的一方,并夹持所述瓶体或所述盖;
124.开闭部,其在纵向方向上设置在靠近所述试样架的位置或远离所述试样架的位置中的另一方,并使所述盖与所述瓶体在纵向方向上分离;以及
125.移动部,其与所述夹持部或所述开闭部中的在纵向方向上远离所述试样架的一方连接,并可将所述盖从所述瓶体上方移开或将所述盖移回到所述瓶体上方。
126.根据上述至少一个实施方式,通过在自动分析装置中设置不与试样容器中的试样接触就可完成开栓动作的开栓臂,省去了原先复杂的清洗和干燥的结构,可以提高自动分析装置的工作效率。并且,由于只需要开栓臂一个结构,因此可以实现自动分析装置的小型
化,改善自动分析装置的维护性。
127.虽然说明了本实用新型的几种实施方式,但是这些实施方式只是作为例子而提出的,并非意图限定本实用新型的范围。这些新的实施方式,能够以其他各种方式进行实施,在不脱离实用新型的要旨的范围内,能够进行各种省略,置换,组合,及变更。这些实施方式和其变形都包含于本实用新型的范围及要旨中,并且包含于权利要求书所记载的本实用新型及其均等范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1