一种高精度定位数据的智能测量仪的制作方法
1.本实用新型涉及gnss测量设备技术领域,具体为一种高精度定位数据的智能测量仪。
背景技术:
2.gnss测量装置是以天线相位中心的坐标位置,在实际应用中需要的是对中杆底端对应点的坐标位置;目前,传统的作业方式需要维持对中杆上的水准气泡居中,将天线相位中心位置传递至测量杆底端对应的测量点,而这一过程需要耗费一定的时间,而且在此过程中容易因手动引起误差,例如风吹、人员走动碰撞和土质松软等均会导致对中杆不能保持垂直,进而导致测量的数据结果出现大的误差,因此,对于如何实现空间矢量的坐标转换,将天线相位中心位置补偿至地面测量点便称为我们需要解决的问题,鉴于上述问题,我们提出了一种高精度定位数据的智能测量仪。
技术实现要素:
3.本实用新型的目的在于提供一种高精度定位数据的智能测量仪,以解决上述背景技术中提出的传统的测量装置容易因客观因素导致其对中杆不能保持垂直,从而影响其测量精度的问题。
4.为实现上述目的,本实用新型提供如下技术方案:一种高精度定位数据的智能测量仪,包括仪器外壳、控制盒、摆锤组件和测量盘,所述控制盒、摆锤组件和测量盘均设置于仪器外壳的内部,所述控制盒为本装置的主板及核心元器件的安装载体,所述摆锤组件包括活动吊设于控制盒下端的摆动杆,同时摆动杆在仪器正位状态下刚好与仪器外壳底部的对中杆的圆心处相重合,所述测量盘的设置于仪器外壳的内部下端,同时位于摆动杆的正下方。
5.优选的,所述摆动杆与控制盒的连接处设置有万向轴,所述摆动杆底部末端设置有配重锤,所述配重锤的底部居中处设置有红外线射灯,同时红外线射灯的发射端朝向正下方的测量盘位置。
6.优选的,所述测量盘为水平圆盘状形式,其上部为平面结构,所述测量盘为的上部设置有以xy轴为基准形式的定位坐标。
7.优选的,所述测量盘为的斜上方一圈设置有至少三个摄像头,同时摄像头固定安装于控制盒的底部。
8.优选的,所述仪器外壳的内部上方还设置有gnss专用天线盘,所述gnss专用天线盘与控制盒的连接处设置有带通滤波器。
9.优选的,所述仪器外壳的外壁一侧还设置有显示板和开关键。
10.与现有技术相比,本实用新型的有益效果是:通过万向轴、摆动杆和配重锤的相互配合使得红外线射灯在正位状态下能够稳定的指向定位坐标的零点位置,此时控制盒内的处理器会以此零点作为基点参数,当仪器外壳及对中杆出现轻微偏移时,摆动杆在万向轴
和配重锤的作用下依然处于垂直状态,而测量盘为则处于倾斜状态,此时红外线射灯射出的光点已偏移定位坐标的基点位置,随后摄像头可对照射在定位坐标上的光点进行实时拍摄,处理器可根据光点对应的坐标点位及系统设定的算法推算出对中杆杆体的偏移角度,进而通过反推算的形式确定对中杆底部顶点的原坐标点位,从而实现高效的精确测量的目的。
附图说明
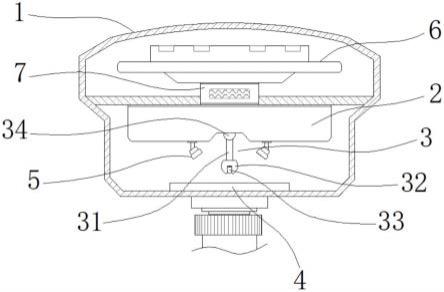
11.图1为本实用新型整体正视内部结构示意图;
12.图2为本实用新型整体正视外部结构示意图;
13.图3为本实用新型测量盘俯视结构示意图。
14.图中:1、仪器外壳;2、控制盒;3、摆锤组件;31、摆动杆;32、配重锤;33、红外线射灯;34、万向轴;4、测量盘;41、定位坐标;5、摄像头;6、gnss专用天线盘;7、带通滤波器;8、显示板。
具体实施方式
15.为使本实用新型的上述目的、特征和优点能够更加明显易懂,下面结合附图对本实用新型的具体实施方式做详细的说明。
16.其次,本实用新型结合示意图进行详细描述,在详述本实用新型实施方式时,为便于说明,表示器件结构的剖面图会不依一般比例作局部放大,而且所述示意图只是示例,其在此不应限制本实用新型保护的范围。此外,在实际制作中应包含长度、宽度及深度的三维空间尺寸。
17.为使本实用新型的目的、技术方案和优点更加清楚,下面将结合附图对本实用新型的实施方式作进一步地详细描述。
18.图1-图3示出的是本实用新型一种高精度定位数据的智能测量仪的全部结构示意图,请参阅图1-图3,本实施方式的一种高精度定位数据的智能测量仪,包括仪器外壳1、控制盒2、摆锤组件3和测量盘4,控制盒2、摆锤组件3和测量盘4均设置于仪器外壳1的内部,控制盒2为本装置的主板及核心元器件的安装载体,摆锤组件3包括活动吊设于控制盒2下端的摆动杆31,同时摆动杆31在仪器正位状态下刚好与仪器外壳1底部的对中杆的圆心处相重合,测量盘4的设置于仪器外壳1的内部下端,同时位于摆动杆31的正下方。
19.本实施例中,摆动杆31与控制盒2的连接处设置有万向轴34,摆动杆31底部末端设置有配重锤32,配重锤32的底部居中处设置有红外线射灯33,同时红外线射灯33的发射端朝向正下方的测量盘4位置,测量盘4为水平圆盘状形式,其上部为平面结构,测量盘4为的上部设置有以xy轴为基准形式的定位坐标41,通过万向轴34、摆动杆31和配重锤32的相互配合使得红外线射灯33在正位状态下能够稳定的指向定位坐标41的零点位置,此时控制盒2内的处理器会以此零点作为基点参数。
20.进一步的,测量盘4为的斜上方一圈设置有至少三个摄像头5,同时摄像头5固定安装于控制盒2的底部,当仪器外壳1及对中杆出现轻微偏移时,摆动杆31在万向轴34和配重锤32的作用下依然处于垂直状态,而测量盘4为则处于倾斜状态,此时红外线射灯33射出的光点已偏移定位坐标41的基点位置,随后摄像头5可对照射在定位坐标41上的光点进行实
时拍摄,处理器可根据光点对应的坐标点位及系统设定的算法推算出对中杆杆体的偏移角度,进而通过反推算的形式确定对中杆底部顶点的原坐标点位,从而实现高效的精确测量的目的,同时也实现了自动补正和简化操作的效果。
21.进一步的,仪器外壳1的内部上方还设置有gnss专用天线盘6,gnss专用天线盘6与控制盒2的连接处设置有带通滤波器7,仪器外壳1的外壁一侧还设置有显示板8和开关键,gnss专用天线盘6能够以多星系为基础从而接收gnss测量仪及对中杆所在位置,带通滤波器7能够将无用的频率信号进行阻拦,并允许有用频率的信号顺利通过,从而达到高效定位的目的。
22.综上,本实施方式的一种高精度定位数据的智能测量仪,当仪器外壳1及对中杆出现轻微偏移时,摆动杆31在万向轴34和配重锤32的作用下依然处于垂直状态,而测量盘4为则处于倾斜状态,此时红外线射灯33射出的光点已偏移定位坐标41的基点位置,随后摄像头5可对照射在定位坐标41上的光点进行实时拍摄,处理器可根据光点对应的坐标点位及系统设定的算法推算出对中杆杆体的偏移角度,进而通过反推算的形式确定对中杆底部顶点的原坐标点位,从而实现高效的精确测量的目的,同时也实现了自动补正和简化操作的效果。
23.虽然在上文中已经参考实施方式对本实用新型进行了描述,然而在不脱离本实用新型的范围的情况下,可以对其进行各种改进并且可以用等效物替换其中的部件。尤其是,只要不存在结构冲突,本实用新型所披露的实施方式中的各项特征均可通过任意方式相互结合起来使用,在本说明书中未对这些组合的情况进行穷举性的描述仅仅是出于省略篇幅和节约资源的考虑。因此,本实用新型并不局限于文中公开的特定实施方式,而是包括落入权利要求的范围内的所有技术方案。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1