非平行光轴耦合的多位点双光子成像刺激装置
1.本实用新型涉及生物光子学应用领域,特别涉及一种非平行光轴耦合的多位点双光子成像刺激装置。
背景技术:
2.双光子荧光成像技术具有厚组织光学穿透力和良好的层析成像能力等优势,在神经科学、胚胎发育、肿瘤病理等生物医学领域获得了良好的应用。传统常规的双光子显微镜的成像视野局限在的1mm2范围内,限制了许多实验开展,如同时记录多个大脑功能区域的神经元群的功能活动。随着技术的进步,目前已产生多种双光子显微成像与光刺激方法,令成像视野不限于单个区域,极大地促进了双光子显微镜在相关生物医学领域的应用潜力。
3.多位点双光子成像的一种方法是研制大口径大视野介观物镜。如期刊文献”a large field of view two-photon mesoscope with subcellular resolution for in vivo imaging”,n.j.sofroniew,elife,2016,研制了一款25.6mm口径,数值孔径0.6,视野直径达5mm的介观物镜,实现了4个区域位点的同时成像。这种基于介观物镜的连续大视野双光子显微镜的缺点是视野受限于光学设计与制造水平,在保持细胞分辨率条件下难以实现视野直径超过8mm的实例。最近应用最多的方法是基于离散区域的多位点双光子成像刺激方法,如期刊文献“matriex imaging:multiarea two-photon real-time in vivo explorer”,yang m,light:science&applications,2019或中国专利zl201811306921.5,提出了一种基于二级放大和多光轴耦合的多层复合物镜结构,上层空气物镜提供大的成像视野,下层微型物镜(通常是自聚焦透镜)负责进行二级放大,将数值孔径提高到满足细胞成像分辨率的要求,通常是多个微型物镜的阵列组合,将成像视野分割成多个离散子视野,实现多位点成像。微型物镜口径小(如2mm),一方面允许多个位点之间的间隔可以较小,另一方面可以轻便地通过连杆带动进行移动甚至植入,区域选择性强。而且这种基于二级放大的多层光学结构允许多位点的选择范围相比单个介观物镜更大,文献中已实现了10mm直径的可选择范围,而且允许区域间在深度方向存在一定落差,适用面更广。但目前该方法中上层空气物镜与下层微型物镜之间的光学耦合是基于平行的光轴耦合,具体是,多个位点区域对应的入射光束的入射角度虽然不同,但经过第一层物镜后,聚焦光束的光轴(中心轴)都是相互平行的,这是由平场扫描物镜的设计原理造成的;微型物镜阵列中各个微型物镜的光轴也是相互平行,每个微型物镜的光轴与经空气物镜后聚焦光束的光轴重合,从而实现光轴耦合。平行光轴耦合带来的问题是:如果成像或刺激目标是位于一个曲率较大的曲面上的两个(或多个)位点,物方视野平面之间其实并不平行,而实际激光扫描放入物方视野平面在平行光轴耦合方法下只能是多个平行的平面,造成实际物方平面与目标物方平面存在夹角,将造成区域内成像的不均匀,以及容易发生微型物镜与样品物理干涉(碰撞)等问题。如何改进这种基于二级放大原理的多层物镜复合光学结构,进行适配于曲面样品上多个非平行平面的双光子成像或光刺激,是目前国际上一个热点问题,但现在缺少可靠的方案。
技术实现要素:
4.本实用新型所要解决的技术问题在于针对上述现有技术中的不足,提供一种非平行光轴耦合的多位点双光子成像刺激装置。
5.为解决上述技术问题,本实用新型采用的技术方案是:一种非平行光轴耦合的多位点双光子成像刺激装置,包括:飞秒激光器、激光扫描装置以及至少两路光学支路;
6.所述光学支路包括第一聚焦光学元件、反射镜和第二聚焦光学元件;
7.所述飞秒激光器发出的飞秒激光进入激光扫描装置,激光扫描装置使得飞秒激光在多个扫描区间之间反复扫描,每个扫描区间的飞秒激光经过一对应的光学支路后到达一个对应的目标位点;进入所述光学支路的飞秒激光经所述第一聚焦光学元件进行第一次聚焦后被反射至所述第二聚焦光学元件,进行第二次聚焦后到达对应的目标位点视野平面。
8.优选的是,所述光学支路中的第二聚焦光学元件的光轴方向与对应的目标位点视野平面的法线平行。
9.优选的是,不同光学支路中的各第二聚焦光学元件之间相互为非平行关系。
10.优选的是,所述光学支路中的第一聚焦光学元件的光轴与第二聚焦光学元件的光轴相交于该光学支路中的反射镜。
11.优选的是,该非平行光轴耦合的多位点双光子成像刺激装置还包括用于对反射镜的三维位置和二维摆角进行调整的第一5轴位移台。
12.优选的是,所述激光扫描装置为双轴扫描器,实现飞秒激光方向的两维偏转与扫描。
13.优选的是,该非平行光轴耦合的多位点双光子成像刺激装置还包括用于对第二聚焦光学元件的三维位置和二维摆角进行调整的第二5轴位移台。
14.优选的是,所述光学支路的数量为两路。
15.优选的是,所述第一聚焦光学元件为低倍物镜或长焦距透镜。
16.优选的是,所述第二聚焦光学元件为微型物镜或自聚焦透镜。
17.本实用新型的有益效果是:本实用新型提供的的非平行光轴耦合的多位点双光子成像刺激装置,采用双层物镜阵列复合结构进行二级聚焦放大和多位点成像,每个微型物镜的光轴方向平行各自目标视野平面的法线,但相互之间是非平行关系;每个支路通过一个反射镜实现低倍物镜光轴到微型物镜光轴的方向转换,该装置适合于对位于曲面样品上的多个存在空间夹角的平面视野区域进行双光子成像或光刺激。
附图说明
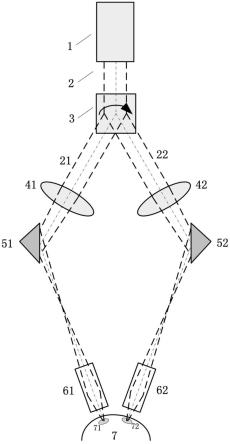
18.图1为本实用新型的非平行光轴耦合的多位点双光子成像刺激装置的结构示意图。
19.附图标记说明:
20.1—飞秒激光器;2—飞秒激光;3—激光扫描装置;21、22—飞秒激光;41、42—低倍物镜;51、52—反射镜;61、62—微型物镜;7—样品;71、72—目标位点视野平面。
具体实施方式
21.下面结合实施例对本实用新型做进一步的详细说明,以令本领域技术人员参照说
明书文字能够据以实施。
22.应当理解,本文所使用的诸如“具有”、“包含”以及“包括”术语并不排除一个或多个其它元件或其组合的存在或添加。
23.实施例1
24.如图1所示,本实施例的一种非平行光轴耦合的多位点双光子成像刺激装置,包括:飞秒激光器1、激光扫描装置3以及两路光学支路;
25.光学支路包括第一聚焦光学元件、反射镜和第二聚焦光学元件;本实施例中,第一聚焦光学元件为低倍物镜(或长焦距透镜),第二聚焦光学元件为微型物镜(或自聚焦透镜)。例如,在一种实施例中,低倍物镜可采用如下型号的产品:mplan apo 2x(mitutoyo),长焦距透镜可采用如下型号的产品:ac254-100-a(thorlabs),微型物镜可采用如下型号的产品:d0224-7x/0.7(南京东利来光电)。
26.飞秒激光器1发出的飞秒激光进入激光扫描装置3,激光扫描装置3使得飞秒激光在多个扫描区间之间反复扫描,每个扫描区间的飞秒激光经过一对应的光学支路后到达一个对应的目标位点进行成像或刺激,如本实施例中,两路飞秒激光21、飞秒激光22为本实施例中两个选择好的扫描区间的中心光轴方向;
27.进入光学支路的飞秒激光经第一聚焦光学元件进行第一次聚焦后被反射至第二聚焦光学元件,进行第二次聚焦后到达对应的目标位点视野平面。如图中飞秒激光21经过低倍物镜41进行第一次聚焦,后被反射镜51反射以重新调整中心光轴方向,然后经过微型物镜61进行第二次聚焦,从而将有效数值孔径由低倍物镜的低数值孔径转换为微型物镜高的数值孔径,提高成像或光刺激的分辨率;飞秒激光22经过低倍物镜42进行第一次聚焦,后被反射镜52反射以重新调整中心光轴方向,然后经过微型物镜62进行第二次聚焦。
28.本实施例中,激光扫描装置33是双轴扫描器,实现飞秒激光方向的两维偏转与扫描;扫描器种类包括检流计振镜、共振镜、旋转多面镜和声光偏转器等。每个扫描区间都是在两维空间角域内的一个小范围两维矩形扫描,各分支的中心光轴即为扫描矩形中心的光轴方向。
29.其中,光学支路中的第二聚焦光学元件的光轴方向与对应的目标位点视野平面的法线基本平行,如图中微型物镜61的光轴方向垂直于目标视野平面71,微型物镜62的光轴方向垂直于目标视野平面72。不同光学支路中的各第二聚焦光学元件之间相互为非平行关系。参照图1,本实施例中,样品7的外轮廓是一个偏椭球的曲线,目标视野平面71和72是位于其表面附近的两个有一定距离的目标位点。两平面的法线方向是非平行的,所以微型物镜61和62的光轴方向也是非平行关系。因此本实例提供的是一种基于非平行光轴耦合的多位点双光子成像刺激装置。
30.其中,光学支路中的第一聚焦光学元件的光轴与第二聚焦光学元件的光轴相交于该光学支路中的反射镜。
31.在优选的实施例中,反射镜的三维位置和二维摆角的调整通过一个第一5轴位移台实现,以使低倍物镜光轴方向和微型物镜光轴方向满足反射定律。根据目标位点的位置和法线方向,第二聚焦光学元件的三维位置和二维摆角通过一个第二5轴位移台实现调整。其中,第一5轴位移和第二5轴位移台均采用常规产品即可(图中未示出),本实施例中不展开描述。
32.本实施例中,为方便描述,展示了两个目标位点的非平行光轴耦合的多位点双光子成像刺激方式,对应的光学支路的数量为两路。可以理解的是,按照其原理,能推广到三个或以上目标位点。总之,本发明的实施方式还可具有多种变换及改型,并不局限于上述实施方式的具体结构。
33.在本实用新型的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“长度”、“宽度”、“厚度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”“内”、“外”、“顺时针”、“逆时针”、“轴向”、“径向”、“周向”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。
34.尽管本实用新型的实施方案已公开如上,但其并不仅仅限于说明书和实施方式中所列运用,它完全可以被适用于各种适合本实用新型的领域,对于熟悉本领域的人员而言,可容易地实现另外的修改,因此在不背离权利要求及等同范围所限定的一般概念下,本实用新型并不限于特定的细节。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1