一种用于防作弊无人值守智能称重系统的制作方法
1.本实用新型涉及智能称重领域,尤其涉及一种用于防作弊无人值守智能称重系统。
背景技术:
2.地磅是设置在地面上的大型磅秤,也被称为汽车衡,是大宗货物计量的主要称重设备,通常用来称卡车的载货吨数,是厂矿、商家等用于大宗货物计量的主要称重设备。按秤体结构,地磅可分为:工字钢地磅、t型梁地磅、l梁钢地磅、u型钢地磅、槽钢地磅、钢筋混凝土地磅;按传感器类型,地磅可分为数字式地磅和模拟式地磅。
3.授权公告号为cn216593720u公开了一种用于防作弊无人值守智能称重系统,涉及汽车称重装置技术领域,包括支撑座与导向块,支撑座的左右两端均固定连接有导向块,该装置在使用时,待称重的车辆驶入支撑座上,并且前后轮外均分别位于限行组件之间,每个限行组件均处于自由转动状态,车辆若发生冲闯现象时,驱动轮与限行组件之间发生相对转动,驱动轮由于失去抓地力而无法前进,从而达到防止冲闯,恶意逃避称重的作弊行为,保证称重操作的正常进行,转轴与转动套之间转动过程中,滚珠能够利用转动过程不断与吸油棉接触,从而滚珠表面能够粘附润滑油,能够对转轴与转动套的接触面进行润滑,减小接触面的摩擦力,从而能够提高限行组件的使用寿命。
4.但是,上述技术方案中采用限行组件使得称重装置处于半封闭状态,车体与限位辊轴发生摩擦,会使得车体辊轮的灰尘杂质泥土颗粒受到摩擦进入到限位组件的缝隙中,不便于清理,且会影响到称重传感器的准确性,因此,需要设计一种用于防作弊无人值守智能称重系统以解决上述问题。
技术实现要素:
5.针对背景技术中存在的问题,提出一种用于防作弊无人值守智能称重系统。
6.本实用新型提出一种用于防作弊无人值守智能称重系统,包括支撑座,所述支撑座内部设置有称重传感器,所述支撑座的一侧设置有清洁机构,所述支撑座的另一侧设置有固定基座,清洁机构包括支撑块,所述支撑块的顶端设置有电动伸缩杆,所述电动伸缩杆的一侧设置有推板,所述推板的底端设置有毛刷。
7.优选的,所述支撑座的两侧设置有坡道板。
8.优选的,所述固定基座分别设置在坡道板的两侧,所述固定基座的顶端分别设置有第二支撑架和第一支撑架。
9.优选的,所述第二支撑架的顶端开设有卡槽,所述第一支撑架的顶端转动安装有限位板。
10.优选的,所述第一支撑架的一侧设置有传动箱,其中一个所述第一支撑架的顶端设置有摄像头,所述传动箱的内部设置有伺服电机,所述伺服电机的一侧转动安装有主动蜗杆,所述传动箱的内部转动安装有转动杆,所述转动杆的外侧设置有从动涡轮,所述从动
涡轮的一侧与主动蜗杆的一侧相互啮合,所述转动杆的一侧延伸至第一支撑架的内部。
11.优选的,所述支撑座的一侧对称设置有倾斜板,所述倾斜板向下倾斜二十度。
12.优选的,所述支撑座的一侧对称设置有夹板块,所述夹板块的内部夹持安装有收集箱。
13.与现有技术相比,本实用新型的有益效果是:
14.1、通过设置有清洁机构,电动伸缩杆启动,使得推板向前推动,通过毛刷将支撑座的表面进行清理,使得在车体检测走后,将封闭的支撑座表面的遗留的杂质推送到一侧进行收集,避免影响支撑座称重传感器进行检测。
15.2、通过设置有第一支撑架和第二支撑架,能够控制车体的进入和放行,从动涡轮带动转动杆发生旋转,转动杆内部同轴设置有角度传感器,将限位板从水平状态抬升到垂直状态,便于使得车体进入支撑座检测,检测过程中两个限位板拦住车体,等待检测完以后,才通过控制系统得到检测数据才予以放行,避免车体逃避检测。
附图说明
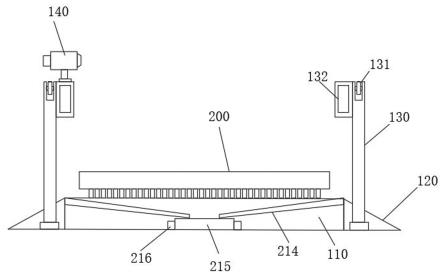
16.图1为本实用新型的结构正视示意图;
17.图2为本实用新型的结构侧视示意图;
18.图3为本实用新型的传动箱正视剖面结构示意图;
19.图4为本实用新型的辅助撑杆侧视结构示意图。
20.图中:110、支撑座;120、坡道板;130、第一支撑架;131、限位板;132、传动箱;133、伺服电机;134、从动涡轮;135、转动杆;136、主动蜗杆;137、第二支撑架;138、固定基座;139、卡槽;140、摄像头;200、清洁机构;210、支撑块;211、电动伸缩杆;212、毛刷;213、推板;214、倾斜板;215、收集箱;216、夹板块。
具体实施方式
21.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
22.实施例一
23.请参阅图1-2,本实用新型提供的一种实施例:一种用于防作弊无人值守智能称重系统,包括支撑座110,本实用新型中使用的所有用电器均为市场上可直接购买到的型号,且其具体工作原理均为本领域人员已熟知的现有技术,故在此不再加以阐述,支撑座110内部设置有称重传感器,支撑座110的一侧设置有清洁机构200,支撑座110的另一侧设置有固定基座138;清洁机构200包括支撑块210,支撑块210的顶端设置有电动伸缩杆211,电动伸缩杆211的一侧设置有推板213,推板213的底端设置有毛刷212;电动伸缩杆211启动,使得推板213向前推动,通过毛刷212将支撑座110的表面进行清理,使得在车体检测走后,将封闭的支撑座110表面的遗留的杂质推送到一侧进行收集,避免影响支撑座110进行检测。
24.进一步的,支撑座110的一侧对称设置有倾斜板214,倾斜板214向下倾斜二十度;倾斜板214便于将杂质导向内部进行收集。
25.进一步的,支撑座110的一侧对称设置有夹板块216,夹板块216的内部夹持安装有收集箱215,收集箱215收集杂质,便于集中处理。
26.实施例二
27.本实用新型提出的一种用于防作弊无人值守智能称重系统,相较于实施例一,请参阅图1,支撑座110的两侧设置有坡道板120;坡道板120便于车体上下进行行动。
28.实施例三
29.本实用新型提出的一种用于防作弊无人值守智能称重系统,相较于实施例一,请参阅图3-4,固定基座138分别设置在坡道板120的两侧,固定基座138的顶端分别设置有第二支撑架137和第一支撑架130;第二支撑架137的顶端开设有卡槽139,第一支撑架130的顶端转动安装有限位板131,能够控制车体的进入和放行。
30.进一步的,第一支撑架130的一侧设置有传动箱132,其中一个第一支撑架130的顶端设置有摄像头140,传动箱132的内部设置有伺服电机133,伺服电机133的一侧转动安装有主动蜗杆136,传动箱132的内部转动安装有转动杆135,转动杆135的外侧设置有从动涡轮134,从动涡轮134的一侧与主动蜗杆136的一侧相互啮合,转动杆135的一侧延伸至第一支撑架130的内部,伺服电机133启动,使得主动蜗杆136发生旋转,使得主动蜗杆136带动一侧的从动涡轮134转动,使得从动涡轮134带动转动杆135发生旋转,转动杆135内部同轴设置有角度传感器,将限位板131从水平状态抬升到垂直状态,便于使得车体进入支撑座110检测,检测过程中两个限位板131拦住车体,等待检测完以后,才通过控制系统得到检测数据才予以放行,避免车体逃避检测。
31.本实用新型的工作原理如下:电动伸缩杆211启动,使得推板213向前推动,通过毛刷212将支撑座110的表面进行清理,使得在车体检测走后,将封闭的支撑座110表面的遗留的杂质推送到一侧进行收集,避免影响支撑座110进行检测。
32.伺服电机133启动,使得主动蜗杆136发生旋转,使得主动蜗杆136带动一侧的从动涡轮134转动,使得从动涡轮134带动转动杆135发生旋转,转动杆135内部同轴设置有角度传感器,将限位板131从水平状态抬升到垂直状态,便于使得车体进入支撑座110检测,检测过程中两个限位板131拦住车体,等待检测完以后,才通过控制系统得到检测数据才予以放行,避免车体逃避检测。
33.上面结合附图对本实用新型的实施方式作了详细说明,但是本实用新型并不限于此,在所属技术领域的技术人员所具备的知识范围内,在不脱离本实用新型宗旨的前提下还可以作出各种变化。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1