一种遥感测绘用新型标识杆的制作方法
1.本实用新型涉及遥感测绘标识杆技术领域,尤其涉及一种遥感测绘用新型标识杆。
背景技术:
2.遥感是通过人造地球卫星上的遥测仪器把对地球表面实施感应遥测和资源管理的监视结合起来的一种新技术,或者使用空间运载工具和现代化的电子、光学仪器,探测和识别远距离研究对象的技术。遥感测绘是是利用遥感技术,在计算机上面进行计算并且能够达到测绘目的行为。
3.现有的遥感测绘大多是利用卫星或无人机等设备将地面的地理情况进行拍照,再通过拍摄的影像进行测绘,从而绘制出地图,在其定位时需要在地面插入标识杆。
4.但是由于目前的标识杆,大多仅在周围贴上反光贴和顶部安装信号发生器,其反光贴的粘贴方式使得光线反射覆盖面积小,使得无人机难以及时发现,影响使用效果。
5.因此,有必要提供一种新的遥感测绘用新型标识杆解决上述技术问题。
技术实现要素:
6.本实用新型解决的技术问题是提供一种具有提高了光线反射角度和面积,便于无人机及时发现,提高使用效果的遥感测绘用新型标识杆。
7.为解决上述技术问题,本实用新型提供的遥感测绘用新型标识杆包括:支撑杆;信号发生器,所述信号发生器固定安装在所述支撑杆的顶端;转轴,所述转轴转动贯穿安装在所述支撑杆上,所述转轴的两端均设有反射机构;所述反射机构包括键槽和花键,所述键槽开设在所述转轴的一端,所述花键啮合设置在所述键槽内,所述花键的一端延伸至所述转轴外并固定安装有横杆,所述转轴上螺纹安装有定位螺栓,所述定位螺栓的端部与所述花键相啮合,所述横杆上通过连接扣可拆卸安装有反光板,所述连接扣和所述反光板均设置多个,多个所述反光板呈不同角度设置。
8.优选的,所述支撑杆上固定安装有外壳,所述外壳内固定安装有电机和电池,所述电机和输出轴和所述转轴上均固定套设有皮带轮,两个所述皮带轮上套设有同一个同步带,所述同步带活动贯穿所述外壳。
9.优选的,所述支撑杆的底端设有底座,所述支撑杆的底端固定安装有与所述底座螺纹连接的螺纹杆。
10.优选的,所述底座的底端固定安装有多个支撑锥杆,多个所述支撑锥杆均倾斜设置,多个所述支撑锥杆的内侧均固定安装有副锥杆,多个所述副锥杆均垂直设置。
11.优选的,所述支撑杆上固定安装有配电盒,所述配电盒与信号发生器、电机和电池均相连接。
12.优选的,所述底座的顶部固定安装有把手,所述支撑杆的外侧和所述底座的顶部均设有反光贴。
13.与相关技术相比较,本实用新型提供的遥感测绘用新型标识杆具有如下有益效果:
14.本实用新型提供一种遥感测绘用新型标识杆:
15.1、通过信号发生器发出信号被卫星和无人机接收,转轴上连接扣安装的反光板调整为不同角度,能够在转动时不断调节反光角度,也增加了反射面积,便于被无人机及时发现,提高了使用效果,键槽和花键的啮合方式简单快捷,不易打滑,最后由定位螺栓进行紧固,不易脱落,通过外壳内的电机带动皮带轮和同步带转动,从而驱动转轴转动,转轴带动多个反光板转动,实现反射角度的不断调整,使用省力,电池进行供电;
16.2、通过底座与支撑杆采用螺纹杆的连接方式,便于现场进行安装,移动时可拆除,方便运输,通过多个支撑锥杆和搭配使用的副锥杆在扎入地面后稳定性较好,适宜在户外使用,通过配电盒进行配电连接,通过把手便于搬运底座,支撑杆和底座上的反光贴增加反射面积和角度。
附图说明
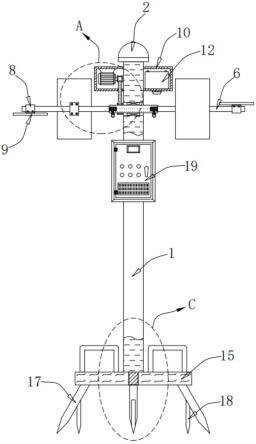
17.图1为本实用新型提供的遥感测绘用新型标识杆的一种较佳实施例的主视剖视结构示意图;
18.图2为图1中所示a部分的放大结构示意图;
19.图3为图2中所示b部分的放大结构示意图;
20.图4为图1中所示c部分的放大结构示意图。
21.图中标号:1、支撑杆;2、信号发生器;3、转轴;4、键槽;5、花键;6、横杆;7、定位螺栓;8、连接扣;9、反光板;10、外壳;11、电机;12、电池;13、皮带轮;14、同步带;15、底座;16、螺纹杆;17、支撑锥杆;18、副锥杆;19、配电盒。
具体实施方式
22.下面结合附图和实施方式对本实用新型作进一步说明。
23.请结合参阅图1-图4,其中,图1为本实用新型提供的遥感测绘用新型标识杆的一种较佳实施例的主视剖视结构示意图;图2为图1中所示a部分的放大结构示意图;图3为图2中所示b部分的放大结构示意图;图4为图1中所示c部分的放大结构示意图。遥感测绘用新型标识杆包括:支撑杆1;信号发生器2,所述信号发生器2固定安装在所述支撑杆1的顶端;转轴3,所述转轴3转动贯穿安装在所述支撑杆1上,所述转轴3的两端均设有反射机构;所述反射机构包括键槽4和花键5,所述键槽4开设在所述转轴3的一端,所述花键5啮合设置在所述键槽4内,所述花键5的一端延伸至所述转轴3外并固定安装有横杆6,所述转轴3上螺纹安装有定位螺栓7,所述定位螺栓7的端部与所述花键5相啮合,所述横杆6上通过连接扣8可拆卸安装有反光板9,所述连接扣8和所述反光板9均设置多个,多个所述反光板9呈不同角度设置,通过信号发生器2发出信号被卫星和无人机接收,转轴3上连接扣8安装的反光板9调整为不同角度,能够在转动时不断调节反光角度,也增加了反射面积,便于被无人机及时发现,提高了使用效果,键槽4和花键5的啮合方式简单快捷,不易打滑,最后由定位螺栓7进行紧固,不易脱落。
24.所述支撑杆1上固定安装有外壳10,所述外壳10内固定安装有电机11和电池12,所
述电机11和输出轴和所述转轴3上均固定套设有皮带轮13,两个所述皮带轮13上套设有同一个同步带14,所述同步带14活动贯穿所述外壳10,通过外壳10内的电机11带动皮带轮13和同步带14转动,从而驱动转轴3转动,转轴3带动多个反光板9转动,实现反射角度的不断调整,使用省力,电池12进行供电。
25.所述支撑杆1的底端设有底座15,所述支撑杆1的底端固定安装有与所述底座15螺纹连接的螺纹杆16,通过底座15与支撑杆1采用螺纹杆16的连接方式,便于现场进行安装,移动时可拆除,方便运输。
26.所述底座15的底端固定安装有多个支撑锥杆17,多个所述支撑锥杆17均倾斜设置,多个所述支撑锥杆17的内侧均固定安装有副锥杆18,多个所述副锥杆18均垂直设置,通过多个支撑锥杆17和搭配使用的副锥杆18在扎入地面后稳定性较好,适宜在户外使用。
27.所述支撑杆1上固定安装有配电盒19,所述配电盒19与信号发生器2、电机11和电池12均相连接,通过配电盒19进行配电连接。
28.所述底座15的顶部固定安装有把手,所述支撑杆1的外侧和所述底座15的顶部均设有反光贴,通过把手便于搬运底座15,支撑杆1和底座15上的反光贴增加反射面积和角度。
29.值得说明的是,本实用新型中涉及到电路和电子元器件以及模块的均为现有技术,本领域技术人员完全可以实现,无需赘言,本实用新型保护的内容也不涉及对于软件和方法的改进。
30.本实用新型提供的遥感测绘用新型标识杆的工作原理如下:
31.使用前,首先将本装置进行装配,装配时首先将底座15放置在地面上,之后人员根据地面松软情况进行固定,如地面较为坚硬稳定时可直接放置,如地面为泥土时,人员可站立在底座15上,在重力作用下支撑锥杆17和副锥杆18插入地面,在倾斜的支撑锥杆17和竖直的副锥杆18固定下,底座15进行稳定固定;
32.随后手持支撑杆1,通过支撑杆1底端的螺纹杆16旋合安装在底座15上,之后手持横杆6,使花键5插入至键槽4内并通过定位螺栓7紧固,此时通过u形的连接扣8和螺栓安装反光板9,并调整两侧多个反光板9的角度和位置,使其均匀分布;
33.使用时打开信号发生器2和电机11,信号发生器2发出信号被卫星和无人机接收,电机11的输出轴转动时带动皮带轮13和同步带14转动,此时驱动转轴3转动,转轴3带动多个反光板9转动,不断调节反光角度,同时支撑杆1和底座15上的反光贴也能够进行反光。
34.与相关技术相比较,本实用新型提供的遥感测绘用新型标识杆具有如下有益效果:
35.本实用新型提供一种遥感测绘用新型标识杆,通过信号发生器2发出信号被卫星和无人机接收,转轴3上连接扣8安装的反光板9调整为不同角度,能够在转动时不断调节反光角度,也增加了反射面积,便于被无人机及时发现,提高了使用效果,键槽4和花键5的啮合方式简单快捷,不易打滑,最后由定位螺栓7进行紧固,不易脱落,通过外壳10内的电机11带动皮带轮13和同步带14转动,从而驱动转轴3转动,转轴3带动多个反光板9转动,实现反射角度的不断调整,使用省力,电池12进行供电,通过底座15与支撑杆1采用螺纹杆16的连接方式,便于现场进行安装,移动时可拆除,方便运输,通过多个支撑锥杆17和搭配使用的副锥杆18在扎入地面后稳定性较好,适宜在户外使用,通过配电盒19进行配电连接,通过把
手便于搬运底座15,支撑杆1和底座15上的反光贴增加反射面积和角度。
36.需要说明的是,本实用新型的设备结构和附图主要对本实用新型的原理进行描述,在该设计原理的技术上,装置的动力机构、供电系统及控制系统等的设置并没有完全描述清楚,而在本领域技术人员理解上述实用新型的原理的前提下,可清楚获知其动力机构、供电系统及控制系统的具体。
37.以上所述仅为本实用新型的实施例,并非因此限制本实用新型的专利范围,凡是利用本实用新型说明书及附图内容所作的等效结构或等效流程变换,或直接或间接运用在其它相关的技术领域,均同理包括在本实用新型的专利保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1