一种高压容器焊缝检测机器人的制作方法
1.本实用新型涉及焊缝检测技术领域,具体涉及一种高压容器焊缝检测机器人。
背景技术:
2.高压容器的生产是通过各个部分的焊接进行的,会出现很多焊缝,由于焊缝引发的事故有很多,为保证生产过程的安全性,需对高压容器的焊缝进行检测,检查其是否存在缺陷。
3.根据申请号:cn202122163949.1的中国专利可知,球罐焊缝检测机器人,解决了现在探伤机器人对于复杂结构适应性较差,会出现吸附力不稳定,机器人有脱离壁面危险的问题。其包括机器人本体,机器人本体上方设有全方位可调节运动的机械手,机械手最前端设有探伤装置;所述机器人本体上方设有红外图像识别系统,红外图像识别系统与机器人本体转动连接;所述机器人本体下端设有行走轮,行走轮上设有多组负压吸盘。
4.但是上述的球罐焊缝检测机器人仍存在一些不足,例如:上述装置在使用中,无法固定待检测物配合进行焊缝全面检测,为解决上述问题,我们提出一种高压容器焊缝检测机器人。
技术实现要素:
5.针对背景技术中提到的问题,本实用新型的目的是提供一种高压容器焊缝检测机器人,以解决背景技术中提到的问题。
6.本实用新型的上述技术目的是通过以下技术方案得以实现的:一种高压容器焊缝检测机器人,包括:侧板,所述侧板的顶面固定安装有仪器块,所述仪器块的一侧开设有侧槽,所述侧槽的内部固定安装有第一电动推杆,所述仪器块的一侧设置有焊缝扫描器;安装组件,所述安装组件设置在所述侧板的一侧,用于安装待检测容器。
7.通过采用上述技术方案,通过设置焊缝扫描器,用于检测高压容器的焊缝,通过设置安装组件,用于限位安装高压容器以配合焊缝扫描器对其进行全面检测。
8.优选地,所述安装组件包括:外槽,所述外槽开设在所述侧板的一侧,所述外槽的内部设置有支撑盘,所述支撑盘的一侧开设有两个顶槽,所述顶槽的内部设置有移动块,所述移动块的一侧固定安装有卡柱,两个所述顶槽相邻的两侧分别内嵌有第二电动推杆,所述第二电动推杆的伸缩轴与相邻的所述移动块固定连接在一起。
9.通过采用上述技术方案,通过设置卡柱,在使用时可通过将待检测高压容器的内腔卡在两个卡柱上,此时即可通过开启第二电动推杆推动两个移动块撑开抵住高压容器的内腔,即可达到安装待检测高压容器,以便于后续全面检测的效果。
10.优选地,所述安装组件还包括:仪器槽,所述仪器槽开设在所述外槽的一侧,所述仪器槽的内部固定安装有步进电机,所述步进电机的输出轴与所述支撑盘固定连接在一起。
11.通过采用上述技术方案,通过设置步进电机,在使用时对待检测高压容器安装后,
此时可通过开启步进电机带动支撑盘转动,即可实现转动高压容器配合焊缝扫描器进行全面检测的效果。
12.优选地,所述卡柱的外圆壁面固定套接有橡胶环。
13.通过采用上述技术方案,通过设置橡胶环,用于进一步的贴合高压容器的内腔,防止出现滑脱的情况。
14.优选地,所述侧板的一侧内嵌有控制面板,所述控制面板与所述步进电机电性连接在一起。
15.通过采用上述技术方案,通过设置控制面板,用于设置步进电机的脉冲次数以控制步进电机的转速,以配合焊缝扫描器对不同大小高压容器转动的检测速率。
16.优选地,所述侧板的一侧固定安装有风机,所述风机的出风口固定套接有万向管,所述万向管的一端固定套接有扇形喷头。
17.通过采用上述技术方案,通过设置万向管,在使用时可通过弯曲万向管定位扇形喷头至待检测高压容器外侧,即可通过风机清理高压容器外部灰尘的效果,防止影响后续的检测。
18.综上所述,本实用新型主要具有以下有益效果:
19.通过设置焊缝扫描器,用于检测高压容器的焊缝,通过设置安装组件,用于限位安装高压容器以配合焊缝扫描器对其进行全面检测,通过设置卡柱,在使用时可通过将待检测高压容器的内腔卡在两个卡柱上,此时即可通过开启第二电动推杆推动两个移动块撑开抵住高压容器的内腔,即可达到安装待检测高压容器,以便于后续全面检测的效果,通过设置步进电机,在使用时对待检测高压容器安装后,此时可通过开启步进电机带动支撑盘转动,即可实现转动高压容器配合焊缝扫描器进行全面检测的效果。
20.通过设置橡胶环,用于进一步的贴合高压容器的内腔,防止出现滑脱的情况,通过设置控制面板,用于设置步进电机的脉冲次数以控制步进电机的转速,以配合焊缝扫描器对不同大小高压容器转动的检测速率,通过设置万向管,在使用时可通过弯曲万向管定位扇形喷头至待检测高压容器外侧,即可通过风机清理高压容器外部灰尘的效果,防止影响后续的检测。
附图说明
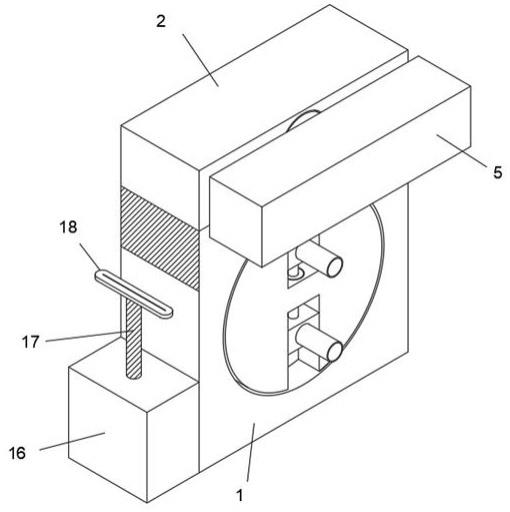
21.图1是本实用新型立体结构示意图;
22.图2是本实用新型仪器块结构示意图;
23.图3是本实用新型外槽结构示意图;
24.图4是本实用新型支撑盘结构示意图。
25.附图标记:1、侧板;2、仪器块;3、侧槽;4、第一电动推杆;5、焊缝扫描器;6、外槽;7、支撑盘;8、顶槽;9、移动块;10、卡柱;11、第二电动推杆;12、仪器槽;13、步进电机;14、橡胶环;15、控制面板;16、风机;17、万向管;18、扇形喷头。
具体实施方式
26.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的
实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
27.参考图1、图2、图3和图4,一种高压容器焊缝检测机器人,包括:侧板1,所述侧板1的顶面固定安装有仪器块2,仪器块2的一侧开设有侧槽3,侧槽3的内部固定安装有第一电动推杆4,仪器块2的一侧设置有焊缝扫描器5,通过设置焊缝扫描器5,用于检测高压容器的焊缝,侧板1的一侧设置有安装组件,用于安装待检测容器,通过设置安装组件,用于限位安装高压容器以配合焊缝扫描器5对其进行全面检测,安装组件包括:外槽6,外槽6开设在侧板1的一侧,外槽6的内部设置有支撑盘7,支撑盘7的一侧开设有两个顶槽8,顶槽8的内部设置有移动块9,移动块9的一侧固定安装有卡柱10,两个顶槽8相邻的两侧分别内嵌有第二电动推杆11,第二电动推杆11的伸缩轴与相邻的移动块9固定连接在一起,通过设置卡柱10,在使用时可通过将待检测高压容器的内腔卡在两个卡柱10上,此时即可通过开启第二电动推杆11推动两个移动块9撑开抵住高压容器的内腔,即可达到安装待检测高压容器,以便于后续全面检测的效果。
28.参照图3和图4,所述安装组件还包括:仪器槽12,仪器槽12开设在外槽6的一侧,仪器槽12的内部固定安装有步进电机13,步进电机13的输出轴与支撑盘7固定连接在一起,通过设置步进电机13,在使用时对待检测高压容器安装后,此时可通过开启步进电机13带动支撑盘7转动,即可实现转动高压容器配合焊缝扫描器5进行全面检测的效果,卡柱10的外圆壁面固定套接有橡胶环14,通过设置橡胶环14,用于进一步的贴合高压容器的内腔,防止出现滑脱的情况。
29.参照图1和图3,所述侧板1的一侧内嵌有控制面板15,控制面板15与步进电机13电性连接在一起,通过设置控制面板15,用于设置步进电机13的脉冲次数以控制步进电机13的转速,以配合焊缝扫描器5对不同大小高压容器转动的检测速率,侧板1的一侧固定安装有风机16,风机16的出风口固定套接有万向管17,万向管17的一端固定套接有扇形喷头18,通过设置万向管17,在使用时可通过弯曲万向管17定位扇形喷头18至待检测高压容器外侧,即可通过风机16清理高压容器外部灰尘的效果,防止影响后续的检测。
30.工作原理:请参考图1、图2、图3和图4所示,在使用时可通过将待检测高压容器的内腔卡在两个卡柱10上,此时即可通过开启第二电动推杆11推动两个移动块9撑开抵住高压容器的内腔进行安装,再通过开启步进电机13带动支撑盘7转动,即可实现转动高压容器配合焊缝扫描器5进行全面检测的效果,通过设置控制面板15,用于设置步进电机13的脉冲次数以控制步进电机13的转速,以配合焊缝扫描器5对不同大小高压容器转动的检测速率,可通过弯曲万向管17定位扇形喷头18至待检测高压容器外侧,即可通过风机16清理高压容器外部灰尘的效果,防止影响后续的检测。
31.尽管已经示出和描述了本实用新型的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本实用新型的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本实用新型的范围由所附权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1